- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Структурный анализ механизма»
Задание №1
«Структурный анализ механизма»
Основы теории
Рычажным называется механизм, состоящий из звеньев, соединённых между собой в низшие кинематические пары. Рычажные механизмы бывают плоские и пространственные. В рычажном механизме звенья соединяются по цилиндрическим или сферическим поверхностям (вращательные пары) и по плоскости (поступательные пары). Эти механизмы могут передавать значительные усилия и мощности, и обладают высоким КПД.
Звено механизма это твердое тело, входящее в состав механизма. Звено может состоять из нескольких деталей соединенных между собой разъемными или неразъемными соединениями, которые не допускают относительного движения между деталями.
 |
На рис. 1, а представлен четырехзвенный кривошипно-ползунный механизм, включающий в себя стойку, кривошип, шатун и ползун. Такой механизм применяется для преобразования вращательного движения кривошипа в поступательное движение ползуна, или наоборот поступательное движение ползуна во вращательное движение кривошипа.
Неподвижное звено любого механизма называется стойкой.
Кривошипом называется звено, совершающее полный оборот вокруг оси.
Звено, совершающее плоскопараллельное движение называется шатуном.
Ползуном называется звено, совершающее прямолинейное движение вдоль неподвижной направляющей.
На рис. 1, б представлен четырехзвенный кривошипно-коромысловый механизм, включающий в себя стойку, кривошип, шатун и коромысло. Применяется для преобразования вращательного движения кривошипа в качательное движение коромысла либо наоборот качательное движение коромысла во вращательное движение кривошипа.
Коромыслом называется звено в виде двуплечего рычага совершающее неполный оборот вокруг оси.
На рис. 1, в представлен кулисный механизм. Кулисный механизм включает в себя стойку, кривошип, кулису и камень кулисы. Применяется для преобразования вращательного движения кривошипа в качательное или вращательное движение кулисы.
Кулисой называется коромысло, служащее направляющей ползуна.
Ползун, совершающий поступательное движение вдоль кулисы называется камнем кулисы.
Под структурой механизма понимается совокупность его составных частей и отношений между ними, т.е. совокупность звеньев, групп или типовых механизмов и подвижных или неподвижных соединений (кинематических пар). Геометрическая структура механизма полностью описывается заданием геометрической формы и размеров его составных частей, их расположения, указания вида связей между ними.Наиболее информативным способом описания структуры механизма является структурная схема.
Под структурной схемой понимают графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ или принятых в специальной литературе, содержащее информацию о числе и расположении частей (звеньев, групп), а также о виде и классе кинематических пар, соединяющих эти элементы. В отличие от кинематической схемы механизма, структурная схема не содержит информации о размерах звеньев и вычерчивается без соблюдения масштабов.
Задачей структурного анализа является задача определения параметров структуры заданного механизма - числа и вида кинематических пар, числа звеньев и структурных групп, числа подвижностей (основных и местных), числа контуров и числа избыточных связей.
Кинематическая пара, есть простейшее из сочленений, обеспечивающее между двумя соединяемыми звеньями тот или другой вид относительного движения.
Сочленения, допускающие пространственное относительное движение называются пространственными кинематическими парами.
Сочленение, допускающее плоское относительное движение называются плоскими кинематическими парами.
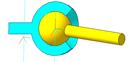
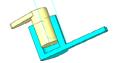
Плоские кинематические пары бывают вращательные, поступательные и высшие. Вращательные кинематические пары (рис. 2, а) обеспечивают только вращательное относительное движение. Поступательные кинематические пары (рис. 2, б) обеспечивают только поступательное относительное движение.
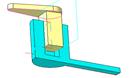
Высшими (рис. 2, в) называются кинематические пары, в которых со  прикосновение звеньев в сочленении происходит по линии или точке, отличии от низших пар, где соприкосновение происходит по поверхности (плоской, цилиндрической, сферической, конической и другим).
прикосновение звеньев в сочленении происходит по линии или точке, отличии от низших пар, где соприкосновение происходит по поверхности (плоской, цилиндрической, сферической, конической и другим).
Классификация кинематических пар показана в таблице 1.
Таблица 1
Классификация кинематических пар
| Кинематическая пара | Наименование пары | Класс пары | Число связей | Подвижность | Обозначение |
| Шар на плоскости | Р1 | |||
| Цилиндр на плоскости | Р2 | |||
| Сферический шарнир | Р3 | |||
| Подпятник | Р4 | |||
| Ползун | Р5 | |||
| Цилиндрический шарнир | Р5 |
 |
Последовательное соединение звеньев кинематическими парами называется кинематической цепью. Кинематические цепи могут быть разомкнутыми (рис. 3) и замкнутыми (рис. 4).
Механизмомназывается замкнутая кинематическая цепь с одним неподвижным звеном.
Неподвижное звено механизма называется стойкой.
На рис. 5 показано образование механизма из замкнутой кинематической цепи.
 |
Под числом степеней свободы понимают число независимых параметров определяющих положение всех звеньев механизма.
Для определения степени свободы механизма необходимо последовательным закреплением звеньев к стойке превратить его в ферму. Число звеньев механизма, которые мы закрепили для превращения механизма в ферму, и будет, является степенью свободы механизма
Для превращения механизма, показанного на рис 6, в ферму необходимо закрепить два звена, предположим 1 и 2 (без учета стойки), следовательно, степень подвижности механизма равна 2
Для определения степени свободы пространственного механизма используют формулу Сомова - Малышева
W=6(n-1)—5Р1-4Р2-3Р3-2P5-P4
 |
Для определения степени свободы плоского механизма используют формулу Чебышева
W=3(n-1)-2P5-P4
Механизм, представленный на рис. 6 имеет 5 звеньев (n=5) и 5 кинематических пар 5 класса (P5=5)
W=3(n-1)-2P5-P4=3·(5-1)-2·5=12-10=2
 Образование механизма по Л. В. Асуру
Образование механизма по Л. В. Асуру
Большинство механизмов в технике имеют одну степень подвижности W=1. Поставлена задача, как получить из имеющегося механизма, новый механизм, обладающий другими свойствами, чем исходный, но также имеющий степень подвижности W=1.
Рассмотрим, в общем виде, образование механизма. Пусть имеется основная система со степенью подвижности Wосн=1 (рис. 7) к которой с помощью кинематических пар 5 класса присоединим добавочную систему со степенью подвижности Wдоб степень подвижность полученной системы:


Установим, какую степень подвижности должна иметь добавочная система. Учитывая, что степень свободы основной и полученной системы W=1, получим из уравнения 1 = 1 + Wдоб-2s или Wдоб=2s, здесь s - это число кинематических пар 5 класса.
Если в незамкнутой кинематической цепи выполняется условие Wдоб=2s , то такая кинематическая цепь называется кинематической группой или группой Асура.
Для рассматриваемой добавочной системы (рис. 6) степень подвижности ровна: Wдоб=2s=12.
Наиболее распространенной кинематической группой (группой Ассура) является диада. Различают 5 видов диад (рис. 8). Рассмотрим, выполняется ли для них условие кинематической группы W=3n – 2p5=3·2 - 2·1=4, число кинематических пар, с помощью которых она будет присоединена к основной системе s=2, W=2s=4 - условие выполняется.
Для образования любого механизма (рис. 9) необходимо иметь начальный, основной механизм. За начальный механизм принимается обыкновенный кривошип.
 |
Кинематическая схема - графическая модель механизма, предназначенная для исследования его кинематики.
Изображение кинематической схемы механизма соответствующее определенному положению механизма называется планом механизма, а изображение представляющий собой ряд последовательных положений звеньев механизма, соответствующих полному циклу его движения, называют планом положений механизма.
Планы строятся в заданном масштабе. Обычно при графическом методе рассматривается 12 положений механизма. Пример плана положений для кривошипно-ползунного механизма приведен на рис. 10.
 Различают понятие масштаба и масштабного коэффициента.
Различают понятие масштаба и масштабного коэффициента.
Масштабом длины называется отношение длины отрезка на чертеже в миллиметрах к натуральной длине звена в метрах.

Масштабным коэффициентом длины называется отношение натуральной длины звена в метрах к длине отрезка изображающего это звено на чертеже в миллиметрах:
 ,
,
где lОА – натуральная длина звена ОА, м (или мм);
ОА – длина отрезка на плане механизма соответствующая звену ОА, мм.
Мёртвая точка — одно из крайних положений поршня в цилиндре механизма в момент его возвратно-поступательного движения. Различают верхнюю и нижнюю мертвые точки.
Для механизма на рис. 10 точка В3 является верхней мертвой точкой (ВМТ), а точки В9 нижней мертвой точкой (НМТ).
Для оценки геометрического «совершенства» механизма используют коэффициенты производительности k и П.
Коэффициентом производительности k называется отношение времени рабочего хода Траб к времени обратного холостого хода Тхол
 (1)
(1)
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|