- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Вычисление координат определяемых точек по результатам первого приближения
5.3.2. Вычисление координат определяемых точек по результатам первого приближения
Описанным ранее способом транспонируя блок поправок в координаты точек 20 и 22 и прибавляя их к координатам, заданным в исходных данных, находим координаты этих точек для второго приближения (рис. 5.63, 5.64)
Рис. 5.63. Координаты точки 22

Рис.5.64. Координаты точки 20.
5.3.3. Замена старых значений неизвестных вычисленными по результатам первого приближения
На основе новых значений неизвестных параметровсоставляется система(5.5) и повторяется решение по алгоритму (5.6)-(5.8). Для этого новые значения параметров по известным правилам копируются в буфер и вставляются в алгоритм на место старых(рис.5.65- 5.67)
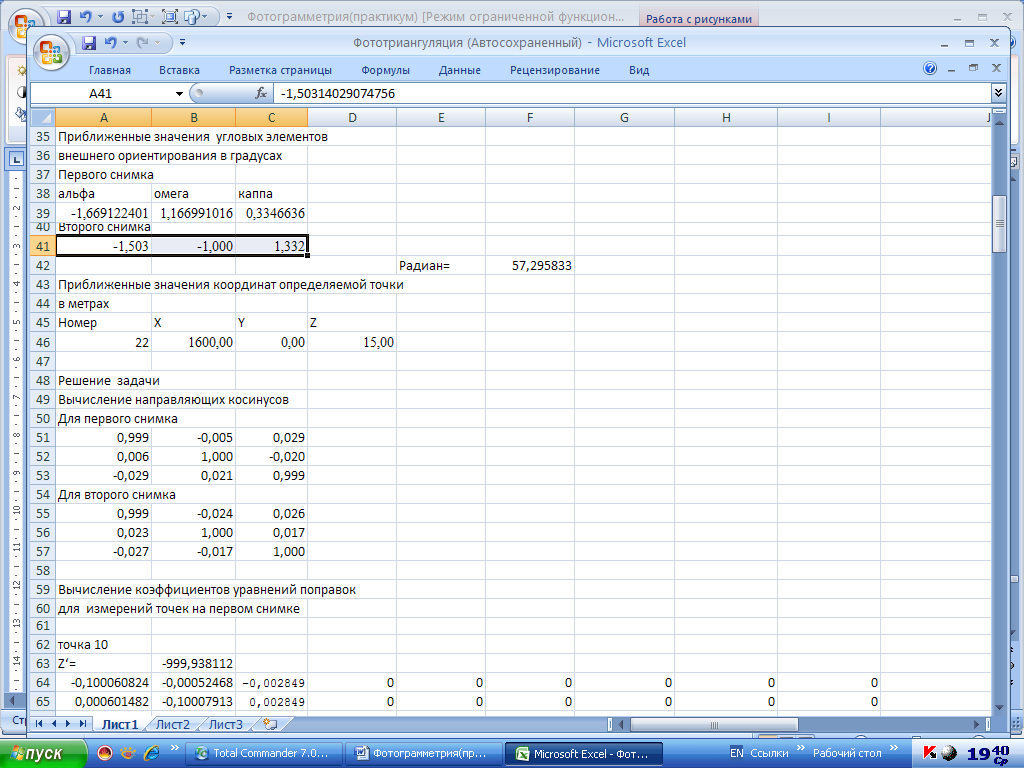
Рис. 5.65. Новые значения ЭВО
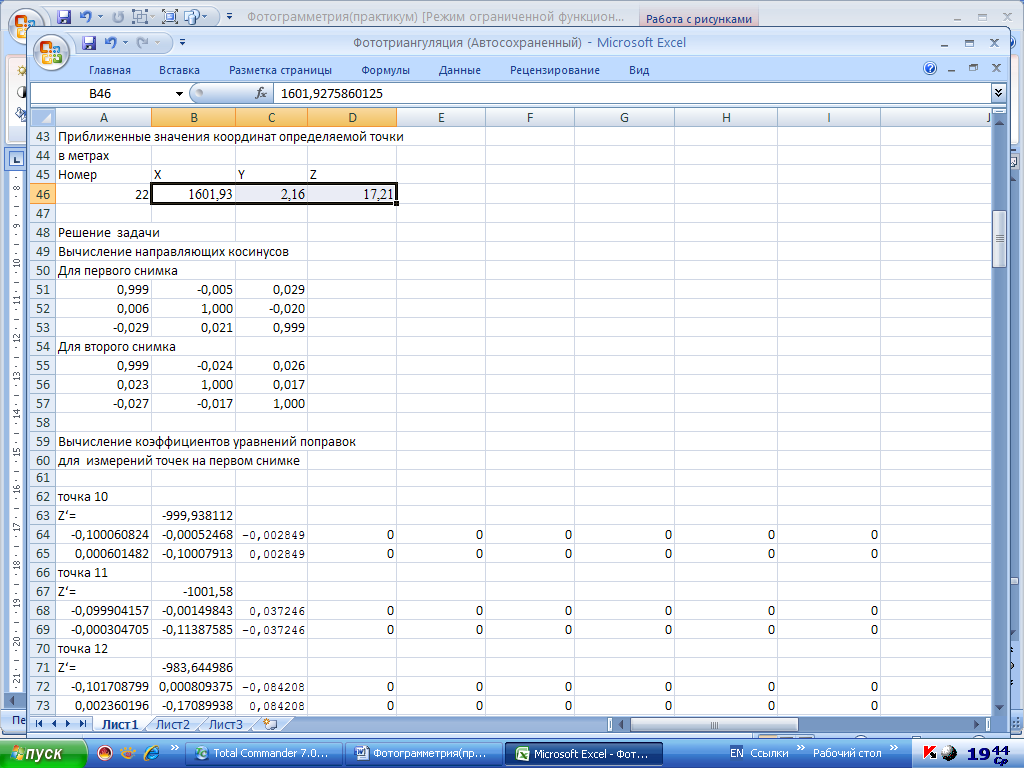
Рис.5.66. Новые значения координат определяемой точки 22
Рис.5.67. Новые значения координат контрольной точки 20.
После ввода новых значений параметров все вычисления в настоящем алгоритме производятся автоматически. В качестве окончательного результата снова получаем
вектор поправок в новые приближенные значения параметров (рис. 5.68) и вектор
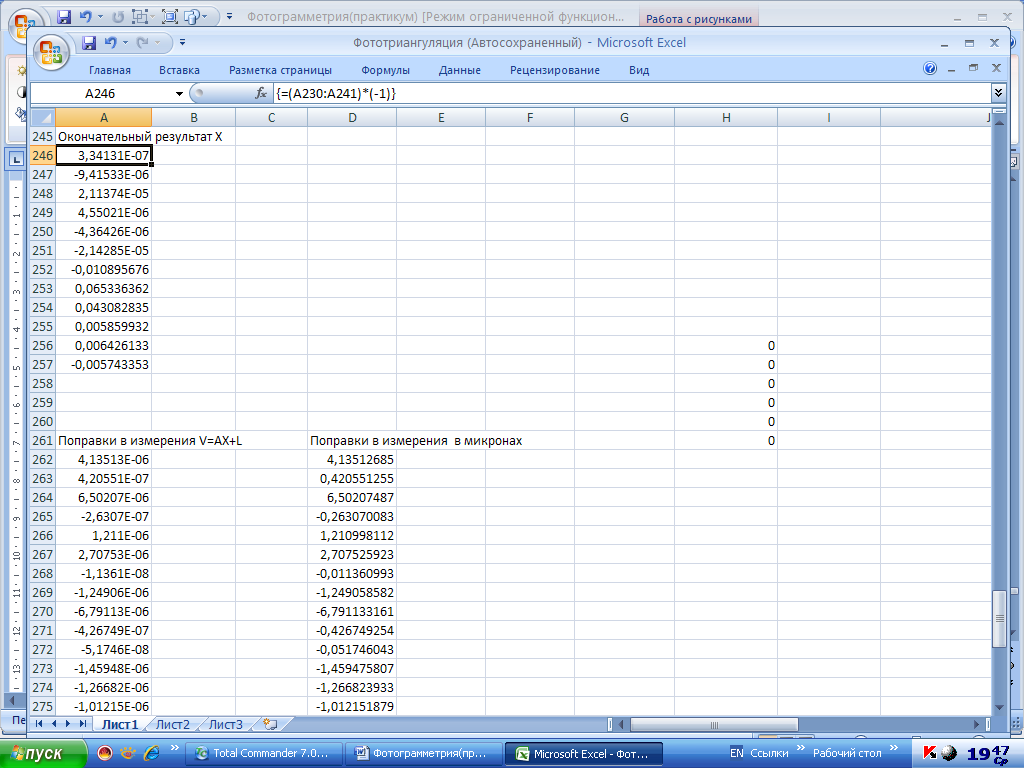
Рис. 5.68. Поправки в приближенные значения неизвестных во втором приближении
поправок в измерения (рис.5.69). Наибольшая поправка в координаты (рис. 5.68, строка 253) составляет величину 0,065 м. Поправки в ЭВО снимков уже ничтожны. Если потребовать точность вычисления поправок в координаты - 0,100 м, то в данном случае приближения можно прекратить.
Для повышения точности вычислений приближения повторяют. Для этого значения неизвестных в третьем приближении вычисляются по такому же по такому же алгоритму , что и во втором:
- из блока окончательных значений через буфер и транспонирование формируем строки
поправок ЭВО в градусной мере и поправок в координаты,
-автоматически вычисляются новые значения параметров для следующего приближения(рис.5.70)
- через буфер старые параметры заменяются новыми и автоматически осуществляется уже третье приближение. Результат третьего приближения приведен на рис.5.71
Судя по вектору Х(рис.5.71) поправки в приближенные значения определяемых координат не превосходят 0,03м. Для всех случаев землеустройства и кадастра такой точности вычислений достаточно. На этом можно прекратить приближения, результат третьего приближения принять окончательным(рис.5.72) и переходить к оценке точности результатов.

Рис. 5.69. Поправки в измерения из второго приближения
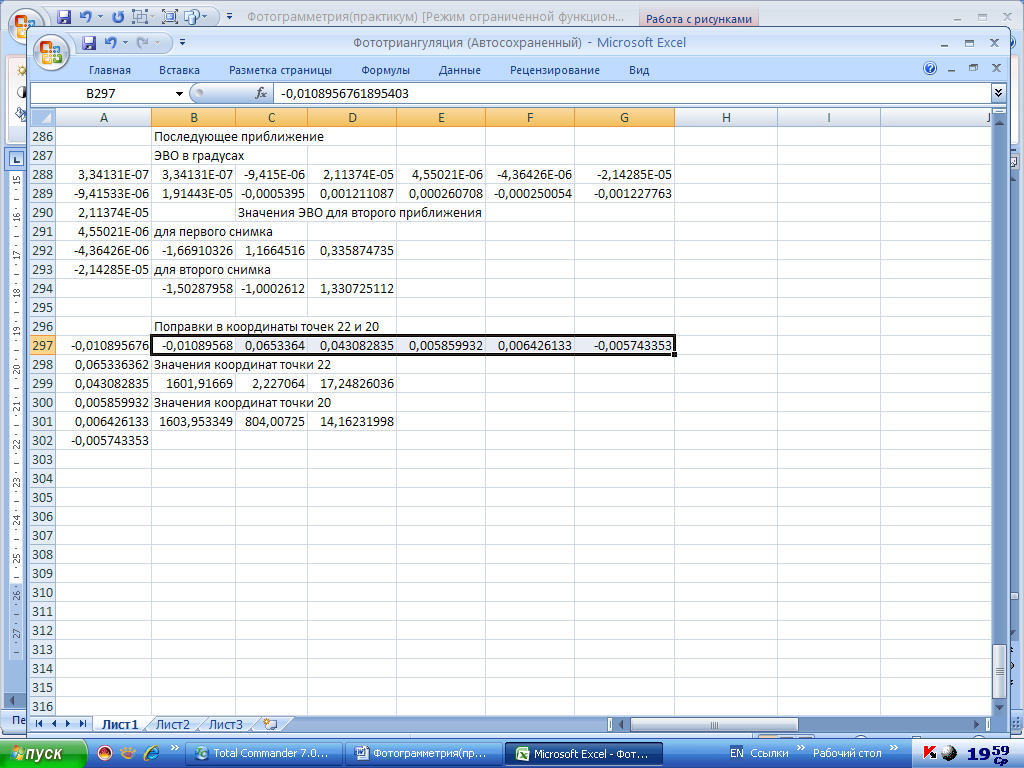
Рис.5.70.Значения параметров для третьего приближения
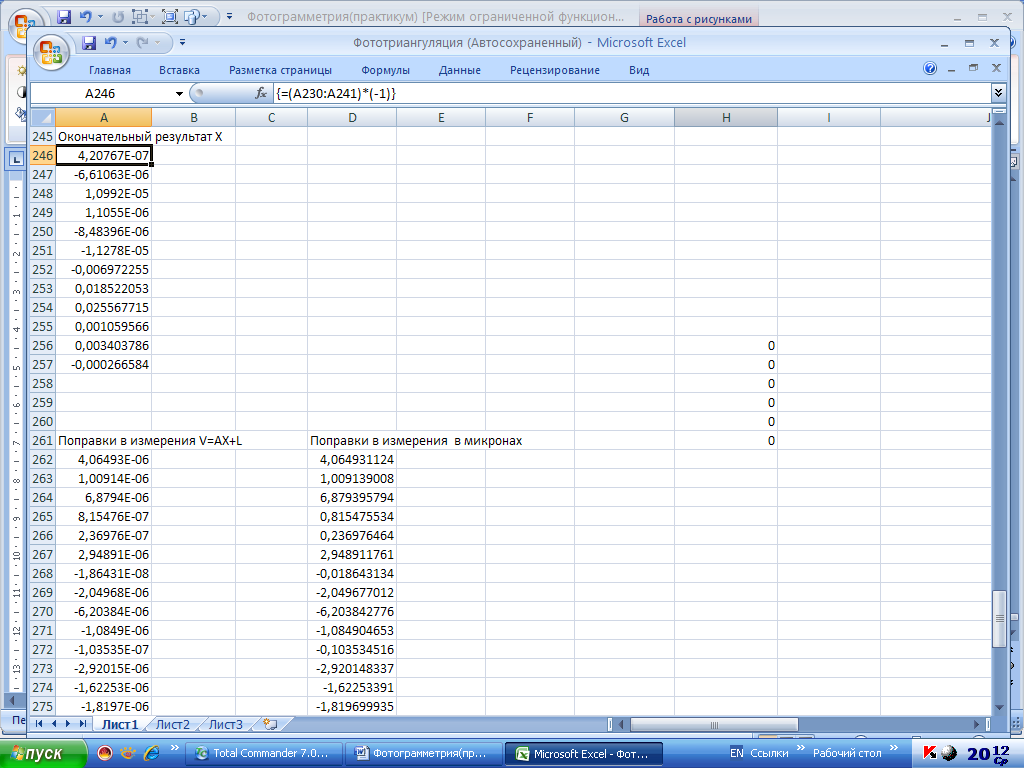
Рис. 5.71.Поправки в определяемые параметры в третьем приближении
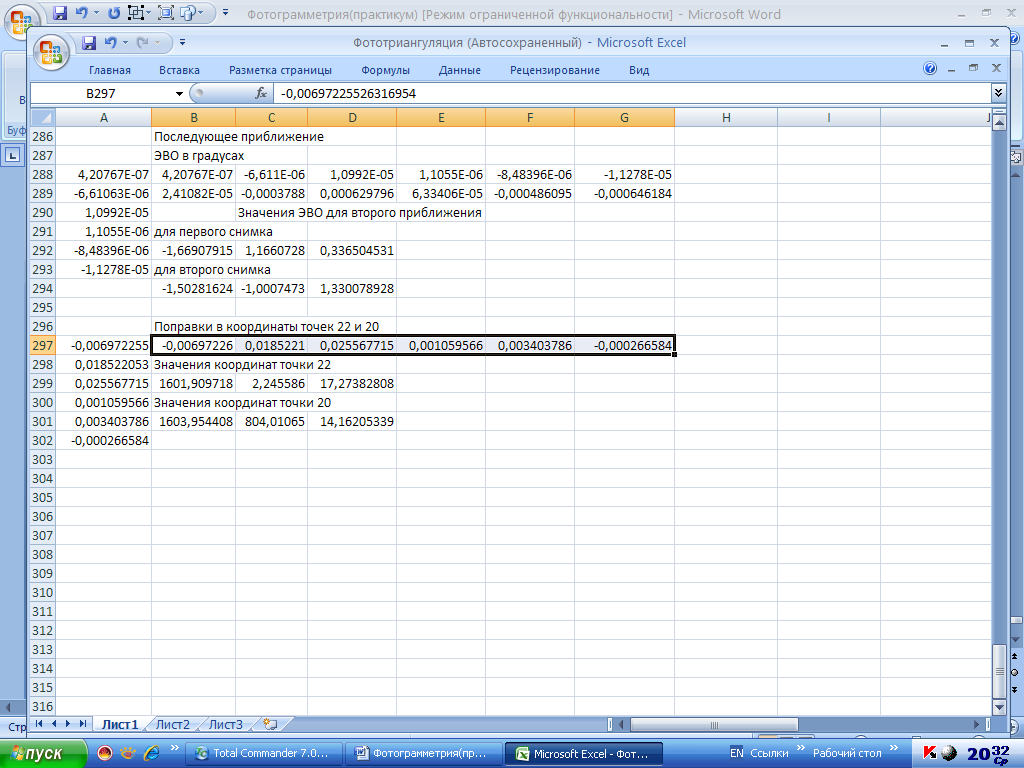
Рис. 5.72. Результат третьего (последнего) приближения
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|