- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Успокоители
3. Успокоители
3.1. Основные сведения
Успокоители (демпферы) служат для устранения вредных собственных колебаний подвижной системы прибора. Почти в каждом приборе имеется подвижная система 1, которая под влиянием различных причин может быть выведена из равновесия и войти в колебания относительно неподвижной части, например корпуса 2. Колебания могут быть вызваны ударами, вибрациями, ускорениями; даже при резком изменении измеряемой величины могут возникнуть собственные колебания подвижной системы прибора. Эти колебания приводят к искажению показаний приборов, затрудняют пользование ими, могут вообще вывести прибор из строя.

Успокоитель создает в движущейся системе прибора сопротивление, на преодоление которого расходуется энергия колебаний системы. Благодаря этому колебания затухают — успокаиваются.
Уравнение движения подвижной системы прибора. Подвижную систему обычно представляют в виде колебательной системы, состоящей из массы m, упругого элемента с жесткостью k и успокоителя, характеризующегося коэффициентом успокоения с. Дифференциальное уравнение движения подвижной системы прибора
 (1)
(1)
где х — смещение массы относительно положения равновесия;  — инерционная сила;
— инерционная сила;  — сила успокоения; kx — сила упругости; Fтр — сила сухого (постоянного) трения; Fвнеш — сила внешнего воздействия.
— сила успокоения; kx — сила упругости; Fтр — сила сухого (постоянного) трения; Fвнеш — сила внешнего воздействия.
 Силу Fтp соответствующим подбором опор подвижной системы доводят до минимума, так как она снижает чувствительность прибора. Поэтому при решении уравнения (1) ею пренебрегают. Силу Fвнеш с помощью амортизаторов можно значительно уменьшить или она вообще может отсутствовать. В связи с изложенным рассмотрим уравнение
Силу Fтp соответствующим подбором опор подвижной системы доводят до минимума, так как она снижает чувствительность прибора. Поэтому при решении уравнения (1) ею пренебрегают. Силу Fвнеш с помощью амортизаторов можно значительно уменьшить или она вообще может отсутствовать. В связи с изложенным рассмотрим уравнение
 (2)
(2)
В зависимости от значения успокаивающей силы решение уравнения (2) имеет различный вид. При очень слабой успокаивающей силе (практически при отсутствии успокоения, когда с можно принять равным нулю)

где  — частота собственных колебаний.
— частота собственных колебаний.
Наибольшее практическое значение имеет решение полного уравнения (2). Приведем его к более простому виду, разделив все члены на коэффициент при первом члене:

Обозначим с/m = 2ε и k / m =  . Тогда уравнение собственных колебаний подвижной системы
. Тогда уравнение собственных колебаний подвижной системы
 (3)
(3)
где ε — половина удельного коэффициента успокоения.
Решение уравнения:
 ,
,
где C1 и С2 — постоянные интегрирования, определяемые из начальных условий.
При анализе решения уравнения (3) рассмотрим три случая: ε = ω0 — критическое успокоение (εкр = ω0); ε > ω0 — лимитационное движение и ε < ω0 — колебательное движение.
Движение подвижной системы прибора с успокоением принято сравнивать с движением в режиме критического успокоения. Для удобства сравнения вводят степень успокоения
D = с/скр = ε / ε кр = ε / ω0.
Степенью успокоения называют безразмерную величину, равную отношению коэффициента успокоения с подвижной системы прибора к коэффициенту успокоения скр, который имел бы место при режиме критического успокоения той же системы. В приборах в основном применяется режим со степенью успокоения меньше единицы. В этом случае (D < 1 или ε < ω0) решение уравнения (3) (рис. 2):
 (4)
(4)
где  — частота собственных колебаний системы с успокоением; γ — сдвиг фазы или начальная фаза; х0 — начальный размах колебаний.
— частота собственных колебаний системы с успокоением; γ — сдвиг фазы или начальная фаза; х0 — начальный размах колебаний.
Рис. 2
Как видно из графика, свободные колебания затухают по закону экспоненты. Очевидно, что чем сильнее успокоение в системе, тем интенсивнее уменьшается размах колебаний, т. е. тем скорее «успокоится» система. Затухание колебаний можно характеризовать коэффициентом затуханий колебаний, или, как его еще называют, декрементом (убавлением) колебаний. Это отношение последующих размахов колебаний одного знака;
 (5)
(5)
В расчетах часто применяют логарифмический декремент колебаний
 (6)
(6)
Связь декремента колебаний со степенью успокоения:


Отсюда
 (7)
(7)
Виды сопротивлений, создаваемых успокоителями. В приборах наряду с рассмотренным случаем Fycn =  (линейное успокоение) применяют успокоители с силой успокоения, пропорциональной второй (и более высокой) степени относительной скорости (например, аэродинамическое, или квадратичное, успокоение Fycn =
(линейное успокоение) применяют успокоители с силой успокоения, пропорциональной второй (и более высокой) степени относительной скорости (например, аэродинамическое, или квадратичное, успокоение Fycn =  , пропорциональной отклонению системы от положения равновесия (магнитно-гистерезисное успокоение Fycn = сх) или просто сухое трение (Fyсп = – F sign
, пропорциональной отклонению системы от положения равновесия (магнитно-гистерезисное успокоение Fycn = сх) или просто сухое трение (Fyсп = – F sign  ). Из сравнения характеристик различных успокоителей (рис. 3) видны их преимущества и недостатки. Например, успокоитель сухого трения, как уже упоминалось, уменьшает чувствительность прибора.
). Из сравнения характеристик различных успокоителей (рис. 3) видны их преимущества и недостатки. Например, успокоитель сухого трения, как уже упоминалось, уменьшает чувствительность прибора.
Рис. 3
Квадратичный успокоитель при малых скоростях движения малоэффективен — создает слишком малую силу успокоения. Лишь линейный успокоитель одинаково хорошо работает как при малых, так и при больших скоростях.
3.2. Расчет успокоителей
Так как введенное в систему успокоение не только гасит собственные колебания системы, но и влияет на ее частотные характеристики, то расчет успокоителя зависит от назначения и условий работы прибора. Это значит, что сначала в зависимости от предъявляемых требований надо определить необходимую степень успокоения для заданного прибора, а затем выбрать тип успокоителя и произвести расчет его основных параметров. В техническом задании на расчет прибора (или успокоителя) может быть указано, что успокоитель должен обеспечить необходимое затухание собственных колебаний системы в заданное время или вообще в самое минимальное время, обеспечить заданный коэффициент затухания колебаний (декремент колебаний), заданную амплитудную или фазовую погрешность прибора при исследовании колебательного процесса.
Определение необходимой степени успокоения. Допустим, что по техническим условиям требуется обеспечить такое затухание собственных колебаний подвижной системы прибора, при котором начальное отклонение системы х0 должно уменьшиться до минимального xmin. B течение заданного времени успокоения tycn (рис. 4). Иногда вместо tycn задано число колебаний системы а (число периодов Т, в течение которых система должна успокоиться, обычно а = 0,5; 1; 1,5 и т. д.), т. е.

Так как практическое значение имеют только максимальные отклонения подвижной системы прибора, то для упрощения расчетов применяем уравнение экспоненты, огибающей вершины кривой колебаний:
Тогда в соответствии с техническими условиями

или, введя степень успокоения D = ε / ω0,

Из этого уравнения находим искомую степень успокоения:

Произведя преобразования, получаем
 (8)
(8)
Необходимо отметить, что при сравнительно больших степенях успокоения (D > 0,7) подвижная система прибора делает не более одного полуколебания.
Выбор типа успокоителя. Считая степень успокоения заданной, решаем вторую часть задачи — расчет собственно успокоителя.
Рис. 4
Наиболее распространенными являются успокоители, позволяющие получать в подвижной системе прибора линейное сопротивление. К таким успокоителям могут быть отнесены воздушные, жидкостные и магнитоиндукционные успокоители.
Воздушные (рис. 5, а) и жидкостные (рис. 5, б) успокоители в большинстве случаев выполняют поршневыми. И в тех, и в других сопротивление движению подвижной системы создается при проталкивании поршнем 1 рабочего тела (воздуха или жидкости) через специальное отверстие 3 малого диаметра, а также через зазор δ между поршнем и стенками цилиндра 2.
Рис. 5
Преимуществом жидкостных успокоителей является возможность получения практически любой степени успокоения в подвижной системе прибора. Однако они имеют и недостатки. Во-первых, приходится принимать различные предохранительные меры от вытекания из них жидкости и загрязнения ею прибора. Из-за этого жидкостные успокоители в основном применяют в крупных стационарных приборах. Во-вторых, вследствие зависимости вязкости жидкости от изменения температуры создаваемое успокоителем сопротивление также изменяется. Наиболее устойчивыми являются жидкости, полученные на основе кремнийорганических соединений. Они одинаково хорошо работают как при низких, так и при высоких температурах, мало изменяя свою вязкость. Работа воздушного успокоителя почти не зависит от изменения температуры окружающей среды. Однако и он имеет недостатки. Одним из этих недостатков является сжимаемость воздуха, что ведет к нарушению режима работы успокоителя. Второй недостаток связан с изменением давления воздуха на разных высотах от поверхности Земли. Из-за этого воздушные успокоители неэффективны в приборах, применяемых в условиях разреженного пространства.
Расчеты успокоителей носят приближенный характер. В связи с этим в воздушных и жидкостных успокоителях предусматривают возможность регулирования проходных сечений рабочих отверстий, например, посредством винтов 4 (рис. 5, а, б). Чтобы определить параметры выбранного типа успокоителя, необходимо найти связь между ними и заданной степенью успокоения.
Определение параметров жидкостного поршневого успокоителя. При движении поршня (рис. 5) на него действует перепад давлений Δр, что приводит к возникновению силы сопротивления

Отсюда
 (9)
(9)
Из гидравлики (закон Пуазейля) известно, что объемный расход жидкости через кольцевую щель (зазор)
 (10)
(10)
где η — динамическая вязкость рабочей жидкости.
Объемный расход жидкости через капилляр

(20.11)
где lк — длина капилляра; 2r — его диаметр.
Общий объемный расход жидкости-, проталкиваемой поршнем,

(20.12)
Из выражений (20.10), (20.11), (20.12) находим

Подставляем найденное значение Ар в формулу (20.9):

При закрытом капилляре (r = 0) получим максимальное значение степени успокоения. Наименьшее значение Dmin получится при полностью открытом капилляре. Таким образом, путем регулирования проходного сечения капилляра можно получить заданное значение степени успокоения, если будет соблюдено неравенство
Dmin < D < D max-
Обычно, определяя параметры жидкостного успокоителя при заданной степени успокоения, из конструктивных соображений выбирают размеры цилиндра и поршня, назначают посадку (H7/f7 или H9/d9), определяющую зазор, длину капилляра и вязкость жидкости. Таким образом, остается найти только диаметр капилляра.
При разработке воздушных успокоителей можно избавиться от расхода воздуха через кольцевую щель (зазор) между поршнем 1 и цилиндром 2. Для этого на поверхности поршня делают проточки (рис.5, а), благодаря чему получается так называемый воздушный сальник. Завихрения воздуха в этом сальнике препятствуют его прохождению через зазор. Следовательно, расход воздуха идет только через капилляр 3. Размер проходного сечения капилляра получают применением вставок с калиброванными отверстиями либо регулируют посредством винта 4 с коническим концом.
Магнитоиндукционные успокоители (рис. 6) в отличие от рассмотренных воздушных и жидкостных обеспечивают строгую линейную зависимость сил торможения от скорости перемещения подвижной системы прибора. Действие магнитоиндукционных успокоителей основано на возбуждении вихревых токов в металлических деталях, перемещающихся в магнитном поле. Вихревые токи создают свои магнитные поля. Взаимодействие этих полей с основным магнитным полем приводит к возникновению сил, тормозящих движение деталей. Наибольшее распространение получили секторные (рис.6, а) и кольцевые (рис. 6, б) успокоители. В секторном успокоителе сектор 1 укреплен на подвижной системе прибора и перемещается при ее движении в воздушном зазоре постоянного магнита 2. Так как вихревые токи возникают в секторе, то его изготовляют из металла с высокой проводимостью — меди или алюминия.
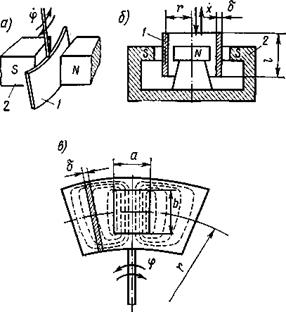 Рис. 6
Рис. 6
У кольцевого успокоителя в рабочем зазоре магнита 2 перемещается кольцо 1 (рис.6, б). Недостатки магнитоиндукционных успокоителей — их относительно большие габариты и масса из-за необходимости применения магнитов с большой индукцией в зазоре. Иногда вместо постоянных магнитов для успокоителей используют электромагниты, что позволяет путем изменения тока питания регулировать силу успокоения.
Расчет параметров магнитоиндукционного секторного успокоителя. Из-за трудности определения путей вихревых токов расчет производится приближенными методами. На рис. 20.6, в показана расчетная схема секторного успокоителя, где а и b — размеры полюса магнита, δ — толщина сектора. Сила, тормозящая движение сектора, создается вихревыми токами и зависит от магнитной индукции В в зазоре, длины b полюса магнита и тока i, протекающего в секторе под полюсом магнита:
где ρ — удельное сопротивление материала сектора, Ом×м; а, b, δ — в м, В — в Тл; k — эмпирический коэффициент, зависящий от формы и размеров сектора, а также расположения магнита относительно сектора. Для наиболее распространенных успокоителей с алюминиевым сектором, применяемых в электроизмерительных приборах, k = 1,5...2.
Пользуясь зависимостью (14), зная D, т и ω0 , и задаваясь параметрами магнитной системы В, а, b, выбираем материал сектора и находим его толщину δ. Регулировку степени успокоения удобнее всего производить изменением положения магнита относительно сектора, т. е. изменением расстояния r.
Расчетная схема кольцевого магнитоиндукционного успокоителя, широко применяемого в различных приборах, показана на рис.6, б. По сравнению с секторным расчет кольцевого успокоителя значительно проще, вследствие того что направление вихревых токов в нем известно: они проходят по кольцу, как по витку длиной 2πr и сечением lδ. Проводя те же рассуждения, что и в предыдущем случае, и написав известные зависимости, получаем следующее расчетное уравнение, связывающее степень успокоения с параметрами кольцевого успокоителя:
D = π r B2 l δ / (m ω0 ρ). (20.15)
Так как расчетное значение степени успокоения является приближенным, в магнитоиндукционных успокоителях регулировку рабочего зазора осуществляют путем изменения толщины сектора или смещением магнита относительно сектора. Можно также изменять размеры полюсных наконечников магнита и материал, из которого изготовляют сектор.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|