- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
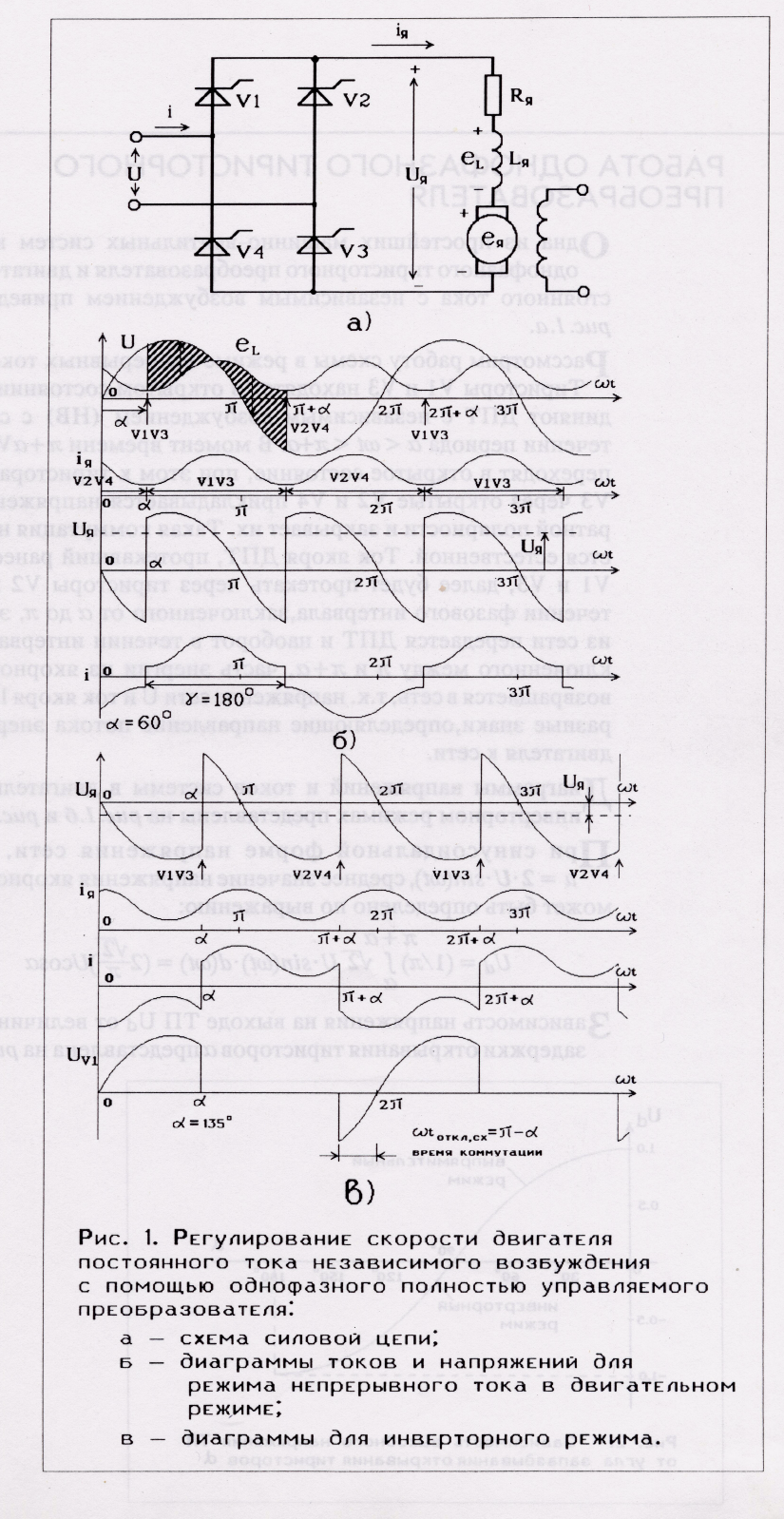
Тема 3.5.4 Снятие характеристик тиристорного преобразователя
_2 пара_2-90_
Тема 3.5.4 Снятие характеристик тиристорного преобразователя
ЗАДАНИЕ:
1.Составить конспект (текст, схемы, графики, таблицы).
_3 пара_2-92_
Тема 3.5.5 Наладка цифровых систем управления и программируемых устройств управления
ЗАДАНИЕ:
1.Составить конспект (текст, схемы, графики, таблицы).
Структурная схема цифровой системы управления
Структурная схема аналоговой следящей системы имеет следующий вид (рис.41).
Основная задача такой САУ – обеспечить минимальное рассогласование  между выходным сигналом системы x(t), например, реальной траекторией движения ракеты, и входным сигналом g(t) – заданной траекторией движения.
между выходным сигналом системы x(t), например, реальной траекторией движения ракеты, и входным сигналом g(t) – заданной траекторией движения.
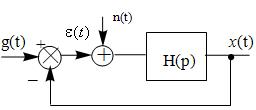
Рис. 41
Фильтр с передаточной функцией H(p) выбирается как раз с учетом требования минимизации ошибки за счет динамики движения объекта и помех n(t), действующих на систему управления. При этом передаточная функция H(p) учитывает как элементы, которые включаются специально для улучшения характеристик системы, так и устройства с заданными передаточными функциями, например, рулевые устройства ракеты. Рассмотрим с точки зрения преобразования в цифровую систему управления уже знакомую нам систему управления двигателем (рис. 42).
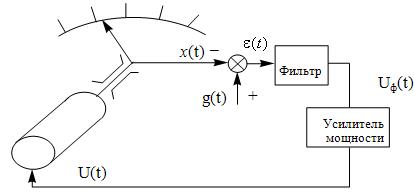
Рис. 42
Анализ такой системы показывает, что основным нестабильным элементом является фильтр. В меньшей степени при изменении климатических воздействий изменяются характеристики усилителя мощности и двигателя.
Таким образом, для повышения стабильности рассматриваемой системы было бы целесообразно, в первую очередь, заменить аналоговый фильтр цифровым. Это можно сделать следующим образом.
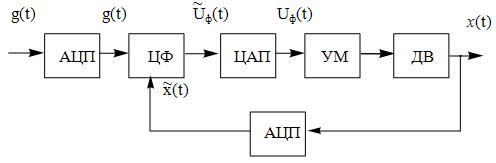
Рис. 43
Преобразуем входной и выходной сигналы g(t) и x(t) в цифровые коды. Тогда фильтр можно будет реализовать на ЦВМ. Выходные коды  преобразуем в аналоговый сигнал
преобразуем в аналоговый сигнал  . В этом случае система будет иметь вид, показанный на рис. 43.
. В этом случае система будет иметь вид, показанный на рис. 43.
Преобразование аналоговых сигналов g(t) и x(t) в цифровые  и
и  осуществляется с помощью аналого–цифровых преобразователей АЦП. В цифровом фильтре реализуются те же операции, что и в аналоговом, например, интегрирование или коррекция. Обычно такой фильтр реализуется в виде специализированной цифровой вычислительной машины. В цифроаналоговом преобразователе числа на выходе цифрового фильтра превращаются в напряжение, поступающее на усилитель мощности.
осуществляется с помощью аналого–цифровых преобразователей АЦП. В цифровом фильтре реализуются те же операции, что и в аналоговом, например, интегрирование или коррекция. Обычно такой фильтр реализуется в виде специализированной цифровой вычислительной машины. В цифроаналоговом преобразователе числа на выходе цифрового фильтра превращаются в напряжение, поступающее на усилитель мощности.
В рассматриваемом случае систему можно было бы сделать полностью цифровой. Например, если двигатель приводит в движение спутниковую антенну, то вместо двигателя и обычной антенны можно применить фазированную антенную решетку с цифровым управлением диаграммой направленности. Но это приведет к значительному повышению стоимости такой системы при небольшом улучшении характеристик. Поэтому реальные цифровые системы управления, как правило, включают в себя аналоговые исполнительные устройства, а все схемы фильтрации и коррекции выполняются в цифровом виде. Таким образом, структурная схема цифровой системы управления приобретает вид, показанный на рис. 44.
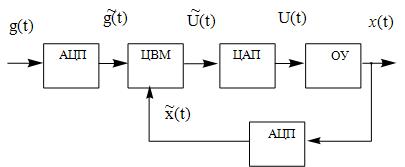
Рис. 44
_4 пара_2-94_
Тема 3.5.6 Проверка логических элементов в составе цифровых систем управления.
ЗАДАНИЕ:
1.Составить конспект (текст, схемы, графики, таблицы).
Современные логические элементы и цифровые устройства выполняютcя на основе интегральных микросхем и обычно используют положительную логику.
Teopетической основой проектирования цифровых систем является алгебра логики или булева алгебра (по имени ее основоположника Д. Буля). В алгебре логики переменные величины и функции oт них могут принимать только два значения 0 и 1 и называются логическими переменными и логическими функциями. Устройства, реализующие логические функции, называются логическими, или цифровыми.
Цифровые устройства имеют принципиальные схемотехнические отличия от аналоговых устройств, обусловленные следующими факторами: менее жесткими требованиями к точности, стабильности параметров и характеристик элементов; возможностью синтеза систем любой сложности с помощью ограниченного набора базовых логических элементов и элементов памяти; возможностью сопряжения функциональных узлов без специальных согласующих элементов (благодаря использованию гальванической связи между функциональными узлами); простотой расширения функциональных возможностей путем набора требуемых сочетаний интегральных микросхем.
Различают два основных класса цифровых устройств; комбинационные и последовательностные автоматы. В комбинационных автоматах определенному сочетанию входных сигналов (набору) соответствует определенный выходной сигал. Они, как правило, не обладают памятью. В последовательностных автоматах такая однозначность отсутствует. В них выходной сигнал зависит от совокупности входных сигналов как в текущий, так и в предыдущие моменты времени. Эти автоматы обладают памятью. В комбинационных автоматах наиболее широкое применение находят такие цифровые устройства, как сумматоры, дешифраторы и преобразователе кодов. В последовательностных автоматах широко используются цифровые устройства с двумя устойчивыми состояниями — триггеры. На их основе строят регистры, счетчики, схемы памяти.
Есть три основных способа, как проверить микросхему, не выпаивая, мультиметром или без него:
1. Внешний осмотр микросхемы. Если внимательно на нее посмотреть и изучить каждый элемент, то не исключено, что удастся найти какой-либо видимый дефект. Это может быть, например, перегоревший контакт (возможно, даже не один). Также при проведении внешнего осмотра микросхемы можно обнаружить трещину на корпусе. При таком способе проверки микросхемы нет необходимости пользоваться специальным устройством мультиметром. Если дефекты видны невооруженным глазом, можно обойтись и без приспособлений.
2. Проверка микросхемы с использованием мультиметра. Если причиной выхода из строя детали стало короткое замыкание, то можно решить проблему, заменив элемент питания.
3. Выявление нарушений в работе выходов. Если у микросхемы есть не один, а сразу несколько выходов, и если хотя бы один из них работает некорректно или вовсе не работает, то это отразится на работоспособности всей микросхемы.
Разумеется, самым простым способом проверки микросхемы является первый из вышеописанных: то есть осмотр детали. Для этого достаточно внимательно посмотреть сначала на одну ее сторону, а затем на другую, и попытаться заметить какие-то дефекты. Самый же сложный способ — проверка с помощью мультиметра.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|