- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
МЭ-32_НалЭО_1 пара_2-88_. Тема 3.5.3 Наладка тиристорных электроприводов
25.06_МЭ-32_НалЭО_1 пара_2-88_
Тема 3.5.3 Наладка тиристорных электроприводов
ЗАДАНИЕ:
1.Составить конспект (текст, схемы, графики, таблицы).
В промышленности широкое распространение получили приводы с управляемыми полупроводниковыми вентилями — тиристорами. Тиристоры изготовляют на ток, доходящий до сотен ампер, на напряжение до 1000 и более вольт. Они отличаются высоким к. п. д., относительно малыми размерами, высоким быстродействием и способностью работать в широком диапазоне температуры окружающей среды (от -60 до +60 °С).
Тиристор представляет собой не полностью управляемый прибор, который включается подачей соответствующего потенциала на управляющий электрод, а отключается только принудительным разрывом цепи тока за счет отключения напряжения, естественного перехода его через нуль или подачи гасящего напряжения обратного знака. Изменением момента подачи управляющего напряжения (его задержкой) можно регулировать среднее значение выпрямленного напряжения и тем самым скорость двигателя.
В системах тиристорного управления двигателями постоянного тока изменение постоянного напряжения на якоре двигателя используют для регулирования его частоты вращения. В этих случаях обычно используют схемы многофазного выпрямления.
На рис. 5, а сплошной линией показана простейшая схема такого рода. В этой схеме каждый из тиристоров Т1, Т2, Т3 включен последовательно со вторичной обмоткой трансформатора и якорем электродвигателя; э. д. с. вторичных обмоток сдвинуты по фазе. Поэтому на якорь двигателя при управлении углом открывания тиристорами подаются импульсы напряжения, сдвинутые по фазе друг относительно друга.
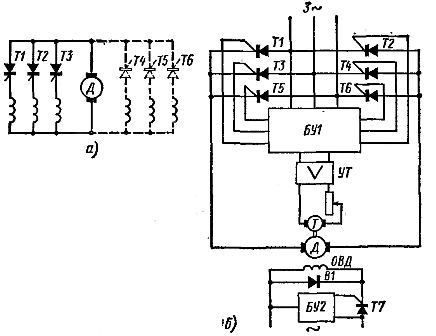
Рис. 1. Схемы тиристорного привода
В многофазной схеме, в зависимости от выбранного угла зажигания тиристоров, через якорь двигателя могут протекать прерывистые и непрерывные токи. У реверсивного электропривода (рис. 1 а, вся схема) используют два комплекта тиристоров: Т1, Т2, Т3 и Т4, Т5, Т6.
Открывая тиристоры той или иной группы, изменяют направление тока в якоре электродвигателя и, следовательно, направление его вращения.
Порядок наладки приводов серий ПМУ и ПМУ-М.
1. Собрать привод по схеме. Включить амперметр в цепь якоря и подключить вольтметр к якорю и к обмотке возбуждения двигателя. Проверить монтаж с помощью омметра. В дальнейшем перед каждым пуском во избежание повреждения амперметра шунтировать его на время разгона двигателя.
2. Ручку задатчика повернуть влево до упора. Движок задатчика должен оказаться в точке 13 схемы (см. рис. 32). На привод желательно подать 50—60% номинального сетевого напряжения. Нагрузить двигатель так, чтобы ток якоря составил 20— 30% номинального (для данного типа привода). Двигатель должен начать вращаться, вольтметр возбуждения должен показывать напряжение 40—60% номинального, вольтметр якоря — от нескольких вольт до нескольких десятков вольт. Поворачивая ручку задатчика вправо, следует убедиться в том, что напряжение на якоре и скорость вращения двигателя растут, а напряжение возбуждения не изменяется.
3. Подать на привод полное сетевое напряжение. Постепенно увеличивая ток нагрузки, проверить, не возникают ли автоколебания скорости и соответственно' тока и напряжения в цепи якоря. Если автоколебания возникают, убрать их, уменьшив величину сопротивления резистора R5 перемещением регулировочного хомутика. Если автоколебаний нет, но скорость сильно снижается при увеличении нагрузки, увеличить сопротивление резистора R5.
4. При номинальном напряжении сети и номинальной нагрузке установить при помощи резистора R3 напряжение возбуждения двигателя равным 90% номинального. При помощи резистора R1 предварительно установить нижний предел регулирования скорости, а при помощи R2 — верхний.
5. В приводах серии ПМУ-М установить величину тока смещения. Для этого установить такую величину сопротивления резистора R4, чтобы при отсоединении провода, ведущего от движка задатчика к блоку питания (точка 25 схемы), частота вращения двигателя, нагруженного током 25% номинального, не превышала 15% номинальной частоты.
6. Постепенно увеличивая сопротивление резистора R5, добиться, чтобы при изменении нагрузки от 25 до 100% номинальной перепад частоты при любом положении движка задатчика не превышал величины, указанной в паспорте. Затем уточнить сопротивление резистора R1.
Изменяя напряжение питания в пределах от 85 до 105% номинального, проверить, чтобы в любом допустимом режиме по частоте вращения и нагрузке не возникало значительных незатухающих колебаний или неравномерного вращения вала двигателя. Если колебания обнаруживаются, то следует уменьшить величину R5, вновь уточнить величину R1 и повторно проверить привод на отсутствие автоколебаний. После окончательной установки сопротивлений резисторов R5 и R1 уточнить величину R2.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|