- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
При увеличении коэффициентов
Показатели качества переходного процесса
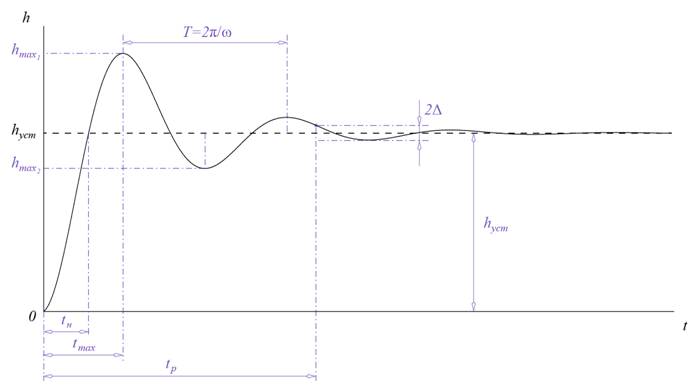
К прямым оценкам качества относят:
- Время регулирования tр — минимальное время, по истечении которого регулируемая величина будет оставаться близкой к установившемуся значению с заданной точностью:
где Δ — постоянная величина, значение которой нужно оговаривать (задается величина Δ в процентах от установившегося значения выходной величины tуст ).
- Перерегулирование σ — максимальное отклонение переходной характеристики от установившегося значения выходной величины, выраженное в относительных единицах или процентах:
где hmax1 — значение первого максимума.
Допустимое значение перерегулирования в каждом конкретном случае будет подсказано опытом эксплуатации системы, обычно σ = 10 ÷ 30 %, но в некоторых случаях допускается и до 70 %. Иногда перерегулирование недопустимо совсем.
- Частоту колебаний ω = 2π /T , где Т — период колебаний для колебательных переходных характеристик.
- Число колебаний n, которое имеет переходная характеристика h(t) за время регулирования tр.
При проектировании систем чаще всего допускают n = 1 ÷ 2, а иногда и до 3 - 4, но в некоторых случаях колебания в системе недопустимы.
- Время достижения первого максимума tmax1.
- Время нарастания переходного процесса tн — абсциссу первой точки пересечения кривой переходной характеристики h(t) с уровнем установившегося значения hуст.
- Декремент затухания χ, равный отношению модулей двух смежных перерегулирований:

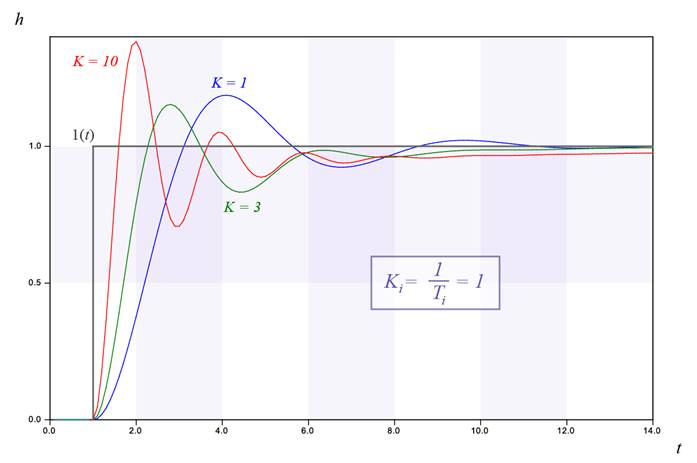
Частный случай ПИД-регулятора - пропорциональный или П-регулятор: u ( t )= K · e ( t ). С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и ненулевую статическую ошибку ( статическая ошибка e0 - постоянная ошибка в установившемся режиме системы; см. рис. ниже).
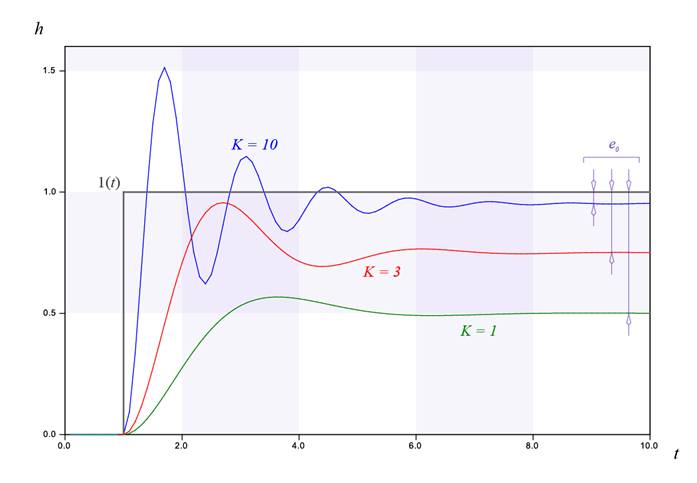
С увеличением пропорционального коэффициента K статическая ошибка e0 уменьшается, время нарастания переходного процесса tн уменьшается, перерегулирование σ увеличивается.
Чтобы убрать статическую ошибку в установившемся режиме, в регулятор вводят интегральный канал с коэффициентом усиления Ki , так что:

Такой регулятор называется пропорционально-интегральным или ПИ-регулятором. Интегратор выдает сигнал, пропорциональный накопленной ошибке, поэтому переходный процесс несколько замедляется.
Однако за счёт интегрального канала обеспечивается нулевая ошибка e0 в установившемся состоянии при ступенчатом возмущении и ступенчатом изменении задающего сигнала-уставки.
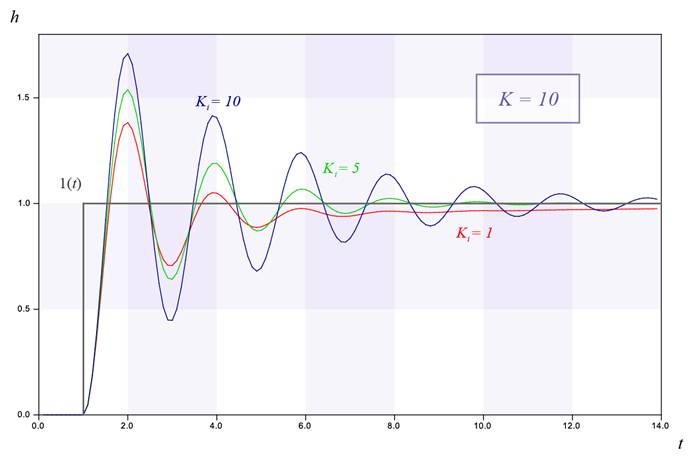
С увеличением коэффициента интегральной составляющей ПИ-регулятора Ki время нарастания переходного процесса tн уменьшается, перерегулирование σ увеличивается, время регулирования tр увеличивается.
Для ускорения переходных процессов добавляют дифференциальный канал с коэффициентом усиления Kd :

| (1. 01) |
Распространена также другая модификация выражения (1. 01):

| (1. 02) |
Где t - время; K - пропорциональный коэффициент (безразмерный), Ti = K/Ki - постоянная интегрирования (размерность времени) и Td = Kd/K - постоянная дифференцирования (размерность времени) регулятора. Такой регулятор называют ПИД-регулятором.
Регуляторы этого типа очень хорошо зарекомендовали себя в практических задачах. Кроме того, иногда используются ПД-регуляторы (пропорционально-дифференциальные), у которых нет интегрального канала.
Управление по производной – это быстрый способ управления. Сигнал дифференциального канала наиболее важен при изменениях входов и исчезает в установившемся режиме. Он позволяет реагировать не на само увеличение ошибки, а на тенденцию ее изменения, и принять превентивные меры. Главный недостаток дифференциального канала – большое влияние высокочастотных помех, например, шумов измерений.
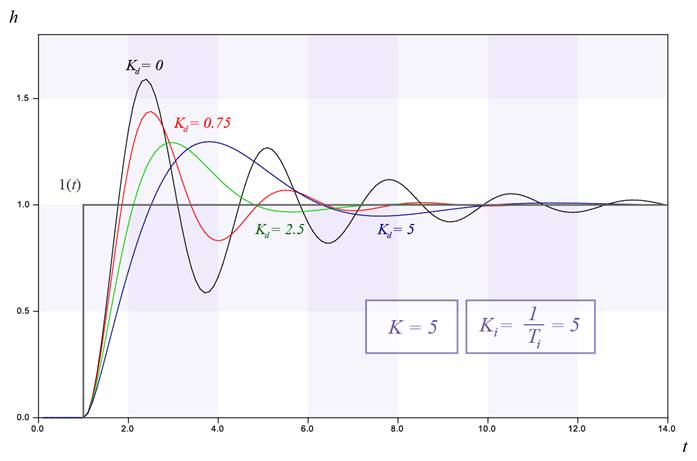
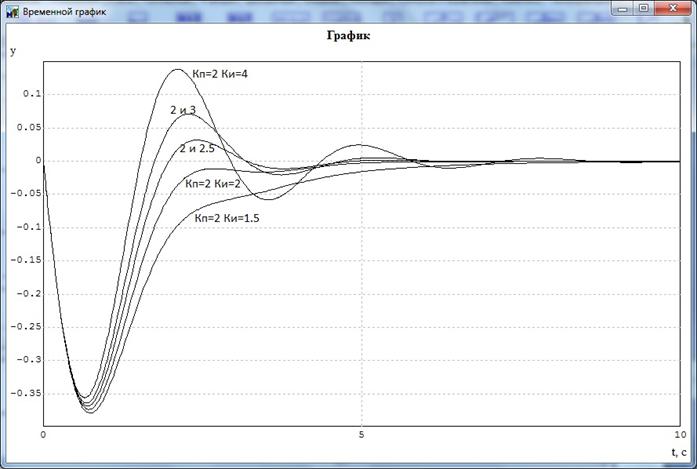
С увеличением коэффициента дифференциальной составляющей ПИД-регулятора Kd перерегулирование σ уменьшается, время регулирования tр уменьшается.
|
При увеличении коэффициентов | |||
| Kp | Ki | Kd | |
| Время нарастанияtн | 
|
| 
|
| Перерегулирование σ | 
| 
| 
|
| Время регулированияtр | 
| 
| 
|
| Статическая ошибкаe0 | 
|  обнуляется
обнуляется
| 
|
|
| |||
|
| |||
 - Увеличивается.
- Увеличивается.  - Уменьшается.
- Уменьшается.  - Устраняется.
- Устраняется.  - Нет определенной тенденции. Незначительное изменение.
- Нет определенной тенденции. Незначительное изменение. Для устойчивого объекта можно выбрать коэффициенты регулятора опытным путём, выполняя эксперименты с реальным объектом. Предложено несколько методов решения этой задачи, например, правила Зиглера-Никольса (Ziegler J. G. - Nichols N. B. ), Коэна-Куна (Cohen O. H. – Coon O. A. ) или CHR (Chien K. L. - Hrones J. A. - Reswick J. B. ).
=========================================================================================
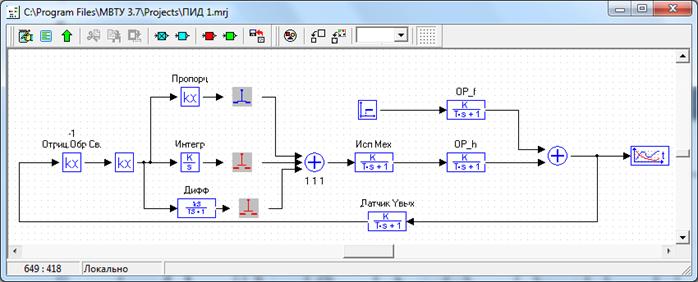
Структурная схема системы стабилизации
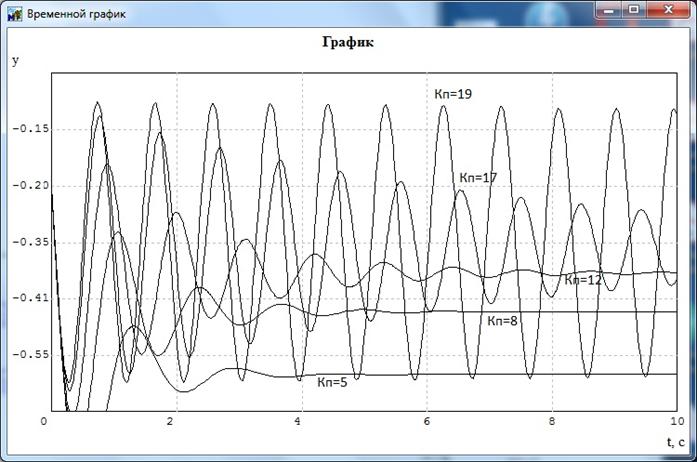
Переходные процессы системы стабилизации с П-регулятором при различных Кп
(Влияние Кп на вид и параметрыПП)
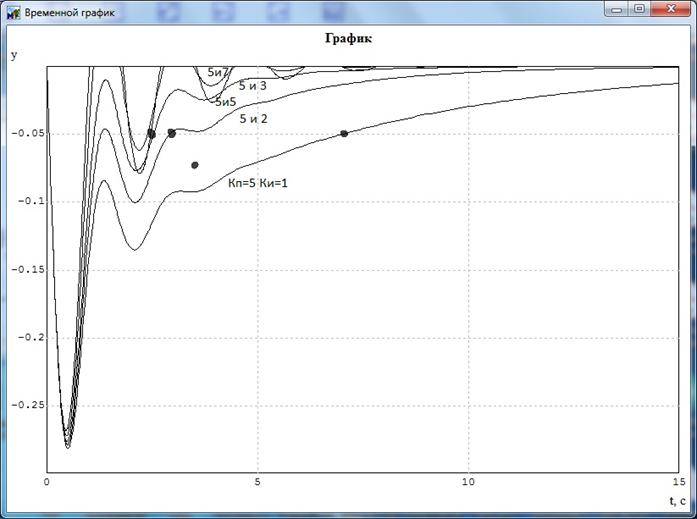
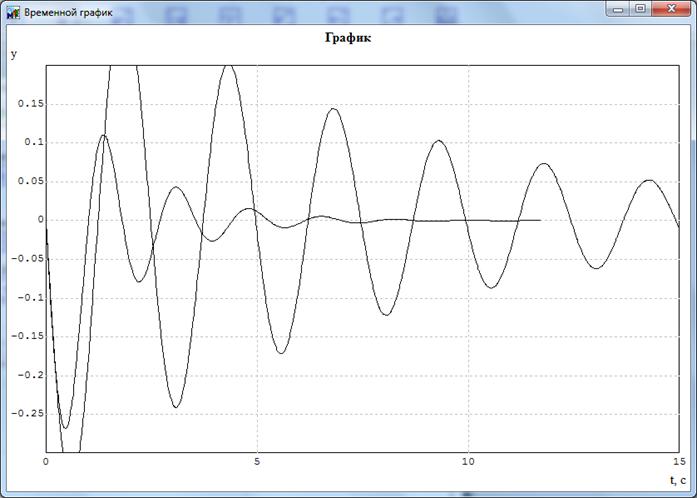
Переходные процессы системы стабилизации с ПИ-регулятором при различных Ки
Кп=5 и Ки=7
5 и 7 2 и 7 более колебательный
Переходные процессы системы стабилизации с ПИ-регулятором при различных Ки: 4, 3, 2. 5, 2, 1. 5
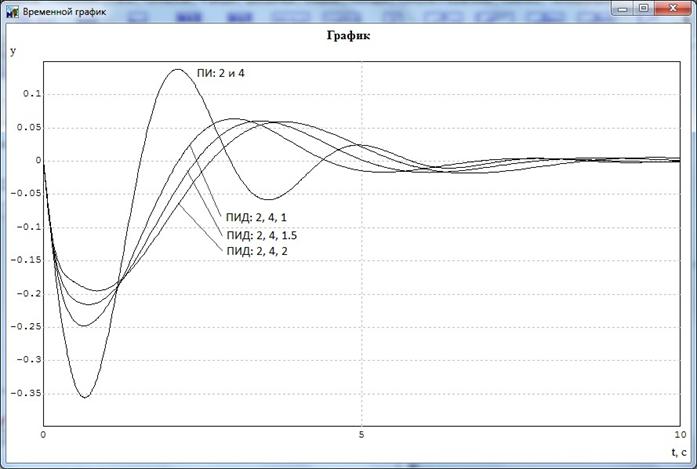
Переходные процессы системы стабилизации с ПИД-регулятором при различных Кд: 1, 1. 5, 2
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|