- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Розрахунково – графічна робота
Розрахунково – графічна робота
з курсу «Мікроконтролерне керування»
Виконав студент 4 курсу РТФ
гр. РВ-11
Артеменко Д. С.
Задані параметри мого варіанту:
Швидкість 19200
Частота 1000 Гц
#include " NUC1xx. h"
void Timer_initial(void);
void InterruptInit(void);
void InitADC(void);
void uart_tx_char(unsigned char data);
void uart_tx_char(unsigned char data);
void hex_to_ascii(unsigned int binary, unsigned char *ascii);
void uart_transmit(unsigned int data);
void InitUSART(void);
unsigned int counter = 0;
int main (void) {
//InterruptInit();
Timer_initial();
InitADC();
//uart_transmit(data);
//uart_tx_char(counter);
while(1){
//uart_transmit(counter++);
}
}
void uart_tx_char(unsigned char data)
{
while(UART0-> FSR. TE_FLAG == 0)
;
UART0-> DATA = data;
}
void Timer_initial(void)
{
/* Step 1. Enable and Select Timer clock source */
SYSCLK-> CLKSEL1. TMR0_S = 0; //Select 12Mhz for Timer0 clk src
SYSCLK-> APBCLK. TMR0_EN =1; //Enable Timer0 clock source
/* Step 2. Select Operation mode */
TIMER0-> TCSR. MODE=1; //Sel. periodic mode for operation mode
/* Step 3. Select Time out period = (Period of timer clock input) * (8-bit Prescale + 1) * (24-bit TCMP)*/
TIMER0-> TCSR. PRESCALE=0; // Set Prescale [0~255]
TIMER0-> TCMPR = 12000; // Set TICR(TCMP) [0~16777215]
// (1/12000000)*(0+1)*(12000)= 1msec or 1000Hz.
За формулою розраховуємо час.
/* Step 4. Enable interrupt */
TIMER0-> TCSR. IE = 1;
TIMER0-> TISR. TIF = 1; //Write 1 to clear for safty
NVIC_EnableIRQ(TMR0_IRQn); //Enable Timer0 Interrupt
/* Step 5. Enable Timer module */
TIMER0-> TCSR. CRST = 1; //Reset up counter
TIMER0-> TCSR. CEN = 1; //Enable Timer0
TIMER0-> TCSR. TDR_EN=1; // Enable TDR function
}
void InitADC(void) {
/* Step 1. GPIO initial */
GPIOA-> OFFD|=0x00800000; //Disable digital input path
SYS-> GPAMFP. ADC7_SS21_AD6=1; //Set ADC function
/* Step 2. Enable and Select ADC clock source, and then enable ADC module */
SYSCLK-> CLKSEL1. ADC_S = 2; //Select 22Mhz for ADC
SYSCLK-> CLKDIV. ADC_N = 1; //ADC clock source=22Mhz/2=11Mhz;
SYSCLK-> APBCLK. ADC_EN = 1; //Enable clock source
ADC-> ADCR. ADEN = 1; //Enable ADC module
/* Step 3. Select Operation mode */
ADC-> ADCR. DIFFEN = 0; //single end input
ADC-> ADCR. ADMD = 0; //single mode
/* Step 4. Select ADC channel */
ADC-> ADCHER. CHEN = 0x80;
/* Step 5. Enable ADC interrupt */
ADC-> ADSR. ADF =1; //clear the A/D interrupt flags for safe
ADC-> ADCR. ADIE = 1;
// NVIC_EnableIRQ(ADC_IRQn);
/* Step 6. Enable WDT module */
ADC-> ADCR. ADST=1;
}
void InterruptInit(void) {
UART0-> IER. RDA_IEN = 1; //Receive Data Available Interrupt Enable
// Clear any previous occurred interrupt for port 3
NVIC_ClearPendingIRQ(UART0_IRQn);
// Set priority of port 3 interrupt
NVIC_SetPriority(UART0_IRQn, 0);
// Enable interrupt at NVIC
NVIC_EnableIRQ(UART0_IRQn);
return;
}
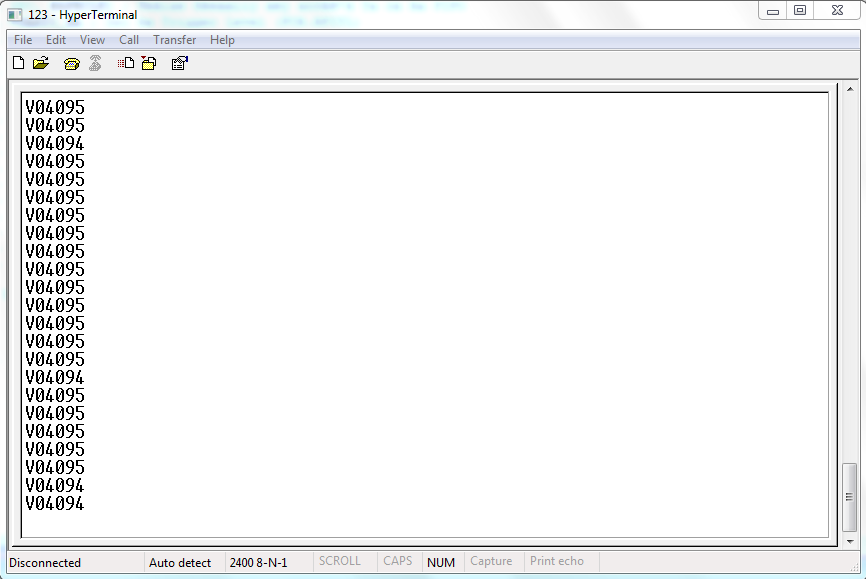
void uart_transmit(unsigned int data)
{
unsigned char buff[5];
hex_to_ascii(data, & buff[0]);
uart_tx_char('V');
uart_tx_char(buff[4]);
uart_tx_char(buff[3]);
uart_tx_char(buff[2]);
uart_tx_char(buff[1]);
uart_tx_char(buff[0]);
uart_tx_char('\n');
uart_tx_char('\r');
}
void hex_to_ascii(unsigned int binary, unsigned char *ascii)
{
register unsigned char n;
for(n = 0; n < = 4; n++)//??????? ???????
ascii[n] = '0';
for(n = 0; n < = 4; n++)//???????????? ? ???????? -?????????? ???
{
ascii[n] = (binary % 10) | '0';
binary = binary / 10;
if(binary == 0) break;
}
}
void TMR0_IRQHandler(void) // Timer0 interrupt subroutine
{
unsigned int tmpres;
TIMER0-> TISR. TIF =1;
ADC-> ADSR. ADF=1;
//while(ADC-> ADSR. ADF==0)
// ;
//tmpres = (ADC-> ADDR[7]. RSLT*312 > > 8);
uart_transmit(ADC-> ADDR[7]. RSLT);
ADC-> ADCR. ADST=1;
}
INCLUDE reg_def. s
AREA |. text|, CODE, READONLY
SystemInit PROC
EXPORT SystemInit [WEAK]
; IMPORT ref_def
LDR R0, =0x50000100
; Unlock Register
LDR R1, =0x59
STR R1, [R0]
LDR R1, =0x16
STR R1, [R0]
LDR R1, =0x88
STR R1, [R0]
; Init Clock Gen for 48 MHz
LDR R0, =CLK_BA
LDR R1, =0x1D; Enable external 4~24 MHz high speed crystal
STR R1, [R0]; XTL12M_EN = 1
LDR R1, =0x0000C22E; IN_DV = 0x1, OUT_DV = 0x3, FB_DV = 0x2E
STR R1, [R0, #PLLCON]; PLLFOUT = 48 MHz from PLL
MOVS R1, #0x3; SysTick clock source select HCLK/2
LSLS R1, R1, #3
MOVS R2, #0x2
ORRS R1, R2; CLK SRC for CPUCLK, HCLK, PCLK - PLLFOUT
STR R1, [R0, #CLKSEL0]
MOVS R1, #0 ; HCLK_N = 0, divide by 1
STR R1, [R0, #CLKDIV]; PLLFOUT = 48 MHz from PLL
; Init GPIO for LED's
LDR R0, =GP_BA
LDR R1, =0x55000000
LDR R2, =GPIOC_PMD
STR R1, [R0, R2]
LDR R1, =0x0000F000
LDR R2, =GPIOC_DOUT
STR R1, [R0, R2]
; Init UART0
; Eiio? ao? ao? y aeaia? a IE aey? iaioe c UART
LDR R0, =GCR_BA
; PB. 0 & PB. 1 Pin Function Selection
MOVS R2, #0x3; 1-UART0 TXD & RXD
STR R2, [R0, #GPB_MFP]; Aecia? aiiy? a? eio? iaioe iiaoey UART0
LDR R0, =UART0_BA
MOVS R2, #0
STR R2, [R0, #UA_FUN_SEL]; Neaiae Reset aey UART0
LDR R0, =GCR_BA ; SYS-> IPRSTC2. UART0_RST = 1;
MOVS R2, #0x1 ; SYS-> IPRSTC2. UART0_RST = 0;
LSLS R2, #16
STR R2, [R0, #IPRSTC2]
MOVS R2, #0x0
STR R2, [R0, #IPRSTC2]; Aa? ieiaiiy UART0
LDR R0, =CLK_BA ; SYSCLK-> APBCLK. UART0_EN = 1;
MOVS R2, #0x1;
LSLS R2, #16
STR R2, [R0, #APBCLK]; Neaiae neeaaiiy aey aooa?? a Tx oa Rx FIFO
LDR R0, =UART0_BA; Set Rx Trigger Level (FCR. RFITL)
MOVS R2, #0x6;
STR R2, [R0, #UA_FCR]; Oiiao aaieo: e-ou? ic?. aaieo, noiiiaeo a? o,
LDR R0, =UART0_BA; ia? aa?? ea ia ia? i? nou
MOVS R2, #0x3; 1 StopBits; No Parity;
STR R2, [R0, #UA_LCR]; Set Time-Out (TOR. TOIC)
LDR R0, =UART0_BA
MOVS R2, #0x1;
LSLS R2, #12; TX Delay Time Value
STR R2, [R0, #UA_TOR]; Iaeaoooaaiiy oaeoiaiai neaiaeo aey iiaoey UART0
LDR R0, =CLK_BA; SYSCLK-> CLKSEL1. UART_S = 0;
LDR R1, =0x00000000; XTL12M to UART
STR R1, [R0, #CLKSEL1]; Mode 2, Baud rate = UART_CLK / (A+2), A must > =3
LDR R0, =UART0_BA; Baud rate =2400
LDR R2, =0x3f00026F; DIV_X_EN=1; DIV_X_ONE=1; A=0x66
З дата шиту до мікроконтролера обираємо формулу і розраховуємо 0x3f00026F
STR R2, [R0, #UA_BAUD]
; SysTick Timer Init to form 1 ms
; LDR R0, =SCS_BA
; LDR R1, =47999
; STR R1, [R0, #SYST_RVR]
; MOVS R1, #0
; STR R1, [R0, #SYST_CVR]
; MOVS R1, #5
; STR R1, [R0, #SYST_CSR]
; Lock register
LDR R0, =0x50000100
MOVS R1, #0
STR R1, [R0]
BX LR
ENDP
END
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|