- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
ПИД - закон.
z =  ,
,
где  - коэффициент настройки воздействия по производной от сигнала рассогласования. Наличие этого воздействия способствует демпфированию колебаний.
- коэффициент настройки воздействия по производной от сигнала рассогласования. Наличие этого воздействия способствует демпфированию колебаний.
На практике при регулировании технологических параметров в текстильной и легкой промышленности наиболее распространен ПИ – закон.
Рассмотрим теперь позиционные регуляторы.
В таких регуляторах непременно присутствует звено, в котором непрерывному изменению входной координаты соответствует скачкообразное изменение выходной координаты, происходящее при некотором значении или значениях входной координаты.
Основным вариантом позиционных регуляторов являются двухпозиционные регуляторы. Существуют и трехпозиционные регуляторы, которые рассматривать не будем, т. к. они используются значительно реже.
У двухпозиционных регуляторов регулирующее воздействие имеет два фиксированных значения, и переход с одного на другое происходит скачком при некотором значении (или значениях) регулирующей величины.
Технологическая схема системы двухпозиционного регулирования уровня жидкости приведена на рис. 49.
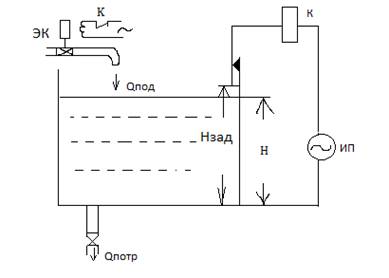
Рисунок 2 – Система двухпозиционного регулирования уровня жидкости
Объект регулирования– емкость.
Регулируемая величина – уровень Н.
Возмущающее воздействие – расход жидкости на стоке 
Регулирующее воздействие –расход жидкости на притоке  .
.
Электродный датчик установлен на заданный уровень -  .
.
Датчик включен в электрический контур с источником питания ИП и катушкой реле К. Предполагается, что жидкость электропроводная, что не снижает общности примера, т. к. практически все технические жидкости таковы (даже чистая вода).
ЭК – электромагнитный клапан, управляемый нормально-замкнутым контактом реле К.
Для обеспечения работоспособности системы должны выполняться условия:
1)  >
> 
2) 
Система работает так.
Если Н< Нзад, то цепь питания реле К разомкнута воздушным промежутком между жидкостью и датчиком, реле выключено, его контакт замкнут, электромагнитный клапан открыт, идет подача, уровень повышается.
Как только жидкость коснется электрода, цепь питания реле К замкнется через жидкость, реле сработает, его контакт разомкнется, ЭК – закроется подача жидкости прекратится, уровень понижается, реле отпускает и система возвращается к предыдущему состоянию.
Статическая характеристика регулятора приведена на рис. 3
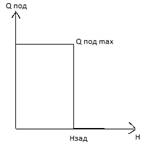
Рисунок 3 – Статическая характеристика двухпозиционного регулятора
Процесс регулирования характеризуется частыми закрытиями и открытиями электромагнитного клапана, приводящими к так называемому автоколебательному режиму - бесконечными колебаниями уровня с неизменной амплитудой и частотой (рис. 4).

Рисунок 4 – Процесс двухпозиционного регулирования уровня жидкости
Как видим, точность поддержания уровня высокая, но при этом надежность системы оказывается низкой из-за частых срабатываний иотпусканий реле и клапана. Такой режим они вряд ли выдержат долго.
Учтем теперь запаздывание в системе, вызванное суммарнымвременем срабатывания τ реле и клапана.
Уравнение динамики объекта имеет вид:
S 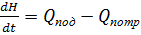 ,
,
где S – площадь поперечного сечения емкости.
Обозначив  , запишем выражение для скорости изменения уровня:
, запишем выражение для скорости изменения уровня:

Вернемся к статической характеристике регулятора, показав на ней  и обозначив соотношения подачи и потребления
и обозначив соотношения подачи и потребления  (рис. 5).
(рис. 5).
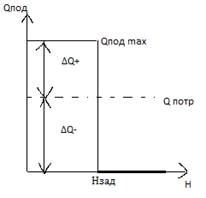
Рисунок 5 – Статическая характеристика регулятора с дополнительными обозначениями
Процесс регулирования с учетом запаздывания τ показан на рис. 6.

Рисунок 6 – Процесс регулирования с учетом запаздывания τ
Оценим амплитуду и период автоколебаний, исходя из уравнения динамики объекта и статической характеристики регулятора.


Амплитуда автоколебаний равна ( 
Симметричные относительно заданного уровня автоколебания будут получены, если вдвое больше .

Поскольку реальное запаздывание, вызванное временем срабатывания реле и клапана, невелико(порядка долей секунды), амплитуда автоколебаний будет малой, а частота большой, что практически не улучшит условий надежности системы.
Более удачным в этом смысле вариантом является система с двумя датчиками уровня (рис. 7).
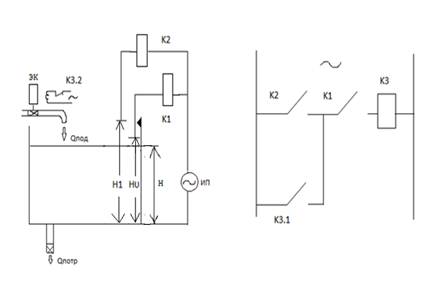

Рисунок 7 – Усовершенствованная система двухпозиционного регулирования
Два электродных датчика установлены на заданные уровни Н1 и Н0. Последовательно с ними включены катушки реле К1 и К2. Их нормально- разомкнутые контакты включены в цепь питания катушки реле К3, один контакт которого (К3. 1) шунтирует контакт К2, а другой (К3. 2) управляет электромагнитным клапаном ЭК.
Система работает следующим образом:
Если Н< H0, то реле K1, K2 выключены, значит выключено реле К3 и клапан ЭКоткрыт.
Если Н1> Н> Н0, то реле К1 включено, его контакт замкнут, но реле К3 выключено, т. к. разомкнут контакт К2, клапан ЭК открыт.
Если Н> Н1, то реле К1, К2 включены, значит включено реле К3, контакт К3. 1 замкнут, К3. 2 разомкнут, клапан ЭК закрыт, уровень понижается, но клапан остается закрытым, т. к. разомкнутый контакт К2 шунтирован замкнутым контактом К3. 1. Клапан ЭК откроется, когда уровень Н станет меньше Н0.
Статическая характеристика такого регулятора(с зоной возврата или зоной неоднозначности Н1 - Н0) приведена на рис. 8.
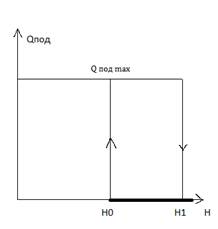
Рисунок 8– Статическая характеристика регулятора с зоной возврата или зоной неоднозначности
Процесс регулирования в такой схеме будет выглядеть, как показано на рис. 9 без учета запаздывания регулятора.
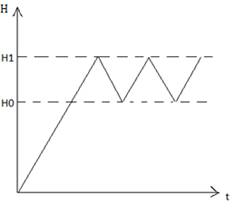
Рисунок 9 – Процесс регулирования в усовершенствованной системе
Воздействовать на частоту автоколебаний можно изменением ширины зоны возврата, но при этом меняется и их амплитуда.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|