- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Тема: Введение в динамику. Предмет динамики. Введение в динамику
Тема: Введение в динамику. Предмет динамики. Введение в динамику
механической системы.
План лекции
Введение в динамику. Предмет динамики. Динамика точки. Основные понятия и определения. Законы механики. Дифференциальные уравнения движения свободной материальной точки в декартовых координатах. Естественные уравнения движения. Две основные задачи динамики. Решение первой задачи. Вторая задача динамики. Интегрирование дифференциальных уравнений движения в простейших случаях.
Введение в динамику механической системы. Основные понятия, определения. Центр масс системы. Радиус-вектор и координаты центра масс системы. Классификация сил. Геометрия масс. Радиус инерции. Теорема Штейнера-Гюйгенса. Момент инерции тела относительно оси любого направления. Главные и главные центральные оси инерции. Примеры вычисления моментов инерции однородных тел.
Основная часть лекции
Аксиомы динамики
В кинематике исследовалось движение тел без учета причин, обеспечивающих это движение. Рассматривалось движение, заданное каким-либо способом, и определялись траектории, скорости и ускорения точек этого тела.
В динамике решается более сложная и важная задача. Определяется движение тел под действием сил, приложенных к ним, с учетом внешних и внутренних условий, влияющих на их движение.
В основе динамики лежат несколько аксиом. Это известные законы Ньютона. Чтобы их сформулировать, введем несколько понятий.
Первое – материальная точка. Материальной точкой будем называть тело, обладающее массой, размеры которого можно не учитывать при определении его движения. Так что материальная точка на самом деле может оказаться довольно солидных размеров. Все зависит от масштабов пространства, в котором тело движется, и от других обстоятельств.
Второе. Точку будем называть изолированной, если на точку не оказывается никакого влияния, никакого действия со стороны других тел и среды, в которой точка движется. Конечно, трудно привести пример подобного состояния. Но представить такое можно.
Теперь можно сформулировать первую аксиому.
Первая аксиома
В основе этой аксиомы лежит первый закон Ньютона. Запишем ее так:
Изолированная материальная точка движется прямолинейно и
равномерно, либо находится в покое, в равновесии.
Правда, при этом возникает вопрос: а относительно чего совершается такое движение? Конечно, наблюдение за таким движением должно вестись из системы отсчета, которая сама движется равномерно и прямолинейно.
Такая система, относительно которой изолированные материальные точки движутся равномерно и прямолинейно, называется инерциальной системой отсчета.
Если материальная точка в такой инерциальной системе не находится в равновесии, то эта точка не будет изолированной. Значит, на нее оказывается действие со стороны других тел, которые выводят ее из состояния равновесия, то есть на нее действуют силы.
Вторая аксиома. Основное уравнение динамики
Из второго закона Ньютона следует, что сила, действующая на точку, изменяет ее движение. Это изменение, как известно из кинематики, характеризуется ускорением. Поэтому вторую аксиому сформулируем так:
При действии на материальную точку силы у точки появляется ускорение, пропорциональное силе и имеющее ее направление.
Эту зависимость можно записать в виде формулы F = mW .
Коэффициент пропорциональности m называется массой точки.
Если на точку действует несколько сил, то их можно заменить одной
силой, равнодействующей R = å Fi, и предыдущее равенство записать так:
mW =å Fi . (12. 1)
Это векторное равенство называется основным уравнением динамики.
При свободном падении тела на него действует сила Р, сила тяжести, которую вблизи поверхности Земли будем называть весом тела. Если не учитывать другие силы, например сопротивление воздуха, то это будет единственная сила, приложенная к телу. Тогда по (12. 1) получим mW = P. Но при этом движении W = g, равно ускорению свободного падения.
Поэтому массу тела будем определять так: m = Pg.

Третья аксиома. Сила инерции
При действии одного тела на другое возникают две силы, равные по величине, направленные по одной прямой в противоположные стороны и приложенные к этим телам.
Конечно, нельзя сказать, что эти две силы уравновешиваются, так как они приложены к разным телам.
Проведем небольшой эксперимент. Попробуем перемещать тяжелое тело по некоторой криволинейной траектории. Сразу обнаружим, что тело сопротивляется изменению направления движения, изменению скорости.
| той, которую | ||||||
| Возникает сила со стороны тела, противодействующая силе F, | ||||||
| мы прикладываем к нему. | ||||||
| Эту | силу, с которой | материальная точка сопротивляется изменению | ||||
| своего | движения, будем | называть | силой инерции | этой | ||
| точки, F ин. | ||||||
По третьей аксиоме она равна и противоположна действующей на точку силе
| , | . Но на основании второй аксиомы | ||||||
| F | F | ин= -F | F | = mW . Поэтому | |||
| F | ин= -mW . | ||||||
| Итак, сила инерции материальной точки по величине равна | |||||||
| произведению ее массы на ускорение | |||||||
| F ин= mW | (12. 2) | ||||||
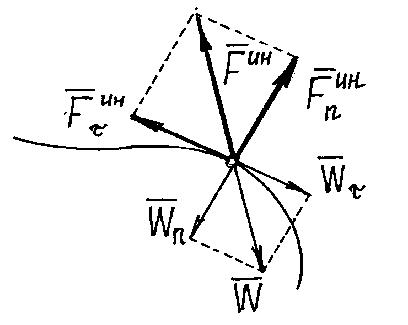
И НАПРАВЛЕНА В СТОРОНУ, ПРОТИВОПОЛОЖНУЮ ВЕКТОРУ УСКОРЕНИЯ.
Например, при движении точки по кривой
|
| |||||||||||||
| линии ускорение | W = Wn | +Wt. | Поэтому | сила | |||||||||
| инерции | |||||||||||||
|
|
| ||||||||||||
| F | ин= -mW | = -mW | - mW | = F ин | + F ин. | ||||||||
| n | t | n | t | ||||||||||
| То есть ее можно находить как сумму двух | |||||||||||||
| сил: нормальной силы инерции и касательной | |||||||||||||
| силы инерции (см. рисунок). Причем | Рис. 12. 1 | ||||||||||||
| F | è í | = m | v2 | , | F è í | = m | d v | . | |||||
| n | r | t | dt | ||||||||||
Необходимо заметить, что сила инерции материальной точки, как сила противодействия, приложена не к точке, а к тому телу, которое изменяет ее движение. Это очень важно помнить.
Динамика материальной точки
Исследование движения тел начнем с анализа движения материальной точки. При этом приходится решать две задачи. Первая задача – известно,
как точка движется, нужно определить силы, вызывающие это движение; вторая, обратная задача – известны силы, действующие на точку, определить, как она будет двигаться.
Дифференциальные уравнения движения
материальной точки
С ПОМОЩЬЮ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ДВИЖЕНИЯ РЕШАЕТСЯ
ВТОРАЯ ЗАДАЧА ДИНАМИКИ. ПРАВИЛА СОСТАВЛЕНИЯ ТАКИХ УРАВНЕНИЙ ЗАВИСЯТ ОТ ТОГО, КАКИМ СПОСОБОМ ХОТИМ ОПРЕДЕЛИТЬ ДВИЖЕНИЕ ТОЧКИ.
1. ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ТОЧКИ КООРДИНАТНЫМ СПОСОБОМ.
ПУСТЬ ТОЧКА М ДВИЖЕТСЯ ПОД ДЕЙСТВИЕМ НЕСКОЛЬКИХ СИЛ (РИС. 13. 2). СОСТАВИМ ОСНОВНОЕ УРАВНЕНИЕ
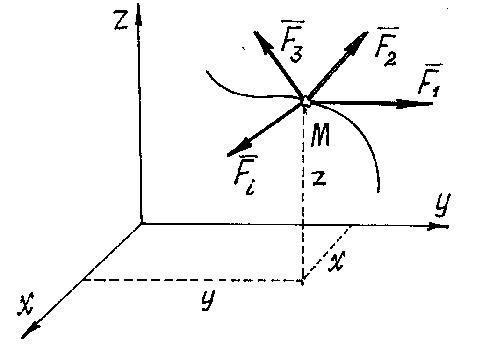
ДИНАМИКИ mW = å Fi И СПРОЕКТИРУЕМ ЭТО ВЕКТОРНОЕ РАВЕНСТВО НА ОСИ X, Y, Z:
mWx
mWy
mWz
| =å X i , ü | Рис. 13. 2 |
| ï | |
| =å Yi , ý |
=å Zi . ï þ
НО ПРОЕКЦИИ УСКОРЕНИЯ НА ОСИ ЕСТЬ ВТОРЫЕ ПРОИЗВОДНЫЕ ОТ КООРДИНАТ ТОЧКИ ПО ВРЕМЕНИ. ПОЭТОМУ ПОЛУЧИМ
| mx =å X i , ü | ||
| ï |
(13. 1) | |
| my =å Yi , ý | ||
| ï | ||
| mz =å Zi . þ |
ЭТИ УРАВНЕНИЯ И ЯВЛЯЮТСЯ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИ ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ. РЕШИВ ИХ, С УЧЕТОМ НАЧАЛЬНЫХ УСЛОВИЙ
ПОЛУЧИМ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ: X = X(T), Y = Y(T), Z =
Z(T).
2. ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ТОЧКИ ЕСТЕСТВЕННЫМ СПОСОБОМ
КООРДИНАТНЫМ СПОСОБОМ ОБЫЧНО ОПРЕДЕЛЯЮТ ДВИЖЕНИЕ ТОЧКИ, НЕ ОГРАНИЧЕННОЕ КАКИМИ-ЛИБО УСЛОВИЯМИ, СВЯЗЯМИ. ЕСЛИ НА ДВИЖЕНИЕ ТОЧКИ НАЛОЖЕНЫ ОГРАНИЧЕНИЯ НА СКОРОСТЬ ИЛИ КООРДИНАТЫ, ТО ОПРЕДЕЛИТЬ ТАКОЕ ДВИЖЕНИЕ КООРДИНАТНЫМ СПОСОБОМ СОВСЕМ НЕПРОСТО. УДОБНЕЕ ИСПОЛЬЗОВАТЬ ЕСТЕСТВЕННЫЙ СПОСОБ ЗАДАНИЯ ДВИЖЕНИЯ.
ОПРЕДЕЛИМ, НАПРИМЕР, ДВИЖЕНИЕ ТОЧКИ ПО ЗАДАННОЙ НЕПОДВИЖНОЙ ЛИНИИ, ПО ЗАДАННОЙ ТРАЕКТОРИИ (РИС. 13. 4).
НА ТОЧКУ М, КРОМЕ ЗАДАННЫХ
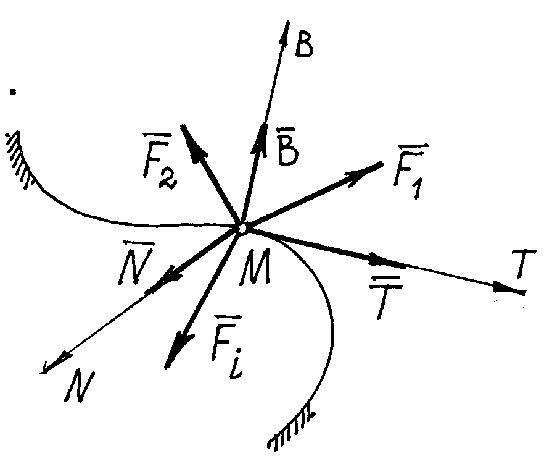
АКТИВНЫХ СИЛ Fi, ДЕЙСТВУЕТ РЕАКЦИЯ ЛИНИИ. ПОКАЗЫВАЕМ СОСТАВЛЯЮЩИЕ
РЕАКЦИИ R ПО ЕСТЕСТВЕННЫМ ОСЯМ
N, T, B.
СОСТАВИМ ОСНОВНОЕ УРАВНЕНИЕ
ДИНАМИКИ mW = å Fi + N + T + B И
| СПРОЕКТИРУЕМ ЕГО НА ЕСТЕСТВЕННЫЕ | Рис. 13. 4 | |
| ОСИ |
mWn =å Fin + N , ü
=å + ï
mWt Fit T , ý
ï
mWB =å Fib + B. þ
| ТАК КАК W = | v 2 | , | W = | d v | = s, | W =0, | ТО ПОЛУЧИМ | |
| n | r | t | dt | b | ||||

ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ, ТАКИЕ
m v2= å Fin + N ,
r


| ms = å Fit+ T , | (13. 2) |
| 0 = å Fib + B. |

ЗДЕСЬ СИЛА T РАВНА СИЛЕ ТРЕНИЯ. ЕСЛИ ЛИНИЯ, ПО КОТОРОЙ ДВИЖЕТСЯ ТОЧКА, ГЛАДКАЯ, ТО СИЛА Т = 0 И ТОГДА ВТОРОЕ УРАВНЕНИЕ БУДЕТ СОДЕРЖАТЬ ТОЛЬКО ОДНУ НЕИЗВЕСТНУЮ – КООРДИНАТУ S:
ms =å Fit.
РЕШИВ ЭТО УРАВНЕНИЕ, ПОЛУЧИМ ЗАКОН ДВИЖЕНИЯ ТОЧКИ S = S(T), А ЗНАЧИТ, ПРИ НЕОБХОДИМОСТИ И СКОРОСТЬ, И УСКОРЕНИЕ. ПЕРВОЕ И ТРЕТЬЕ
УРАВНЕНИЯ (13. 2) ПОЗВОЛЯТ НАЙТИ РЕАКЦИИ N И B.
Домашнее задание:
1. Прочитайте и выполните конспект
Критерии оценки
«5» - конспект выполнен в полном объеме
«4» - конспект выполнен, но недостаточное количество рисунков
«3» - конспект выполнен частично, не записаны формулы
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|