- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
BallandplatePIDcontrol
Шарик на системе плиты выдвижение 2 размеров к шарику на системе Луча. Проблема шара на балке становится интересной, потому что когда шар начинает двигаться, он будет скатываться с конца балки, если не будет предпринято никакого управляющего воздействия. Конструкция шарика на Луче включает луч который можно опрокинуть или от центра оси или от оси края приводом. Шарик ограничен к одному габаритному движению, которое вдоль луча только. Датчик используемый в этой системе измеряет положение шарика и обычно сопротивление провод Бегущий по балке. Шарик сделан из проводного материала, например стального шарового подшипника. По мере того как шарик свертывает косой, это поменяет полное сопротивление системы, поэтому общее сопротивление передаст точная индикация где шарик. Шарик на системе плиты вычислен как 2-d развитие шарика на системе Луча. Он имеет x и y-размерность которая позволяет шарику свернуть вдоль различных путей. Этот тип системы можно контролировать как для положения шарика, так и для следования путя, таким образом раскрывая вверх по другому полю в робототехнике, то есть запланированию траектории. Он также будет иметь несколько прямых приложений, таких как робототехника манипуляции с круглыми предметами. Когда речь заходит о косвенных приложениях, студенты бакалавриата получат выгоду от этого из-за демонстрации в управлении и обработке изображений и могут быть использованы в качестве лабораторного оборудования.
Электроника: 2 цифровых сервомоторов (HS-422 ECO), микроконтроллера Arduino UNO, 4-проводного резистивного сенсорного экрана (7" ), два пид-контроллера
Материалы: Шарик сделан из проводного материала, например стального шарового подшипника, плато-пластмасса.
Видео:
https: //youtu. be/_YILNkytBjE
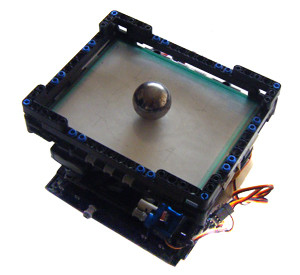
Стержень syconsists верхней плиты и нижней поддержки. Бал l рулон s f reely над верхней пластиной, на которой a
сенсорный экран-это плацдарм t o determine координаты t он мяч. Верхняя плита соединена к Ботт ом т он
плита means соединения шарика и так cket для того чтобы provide свободно M otion в направлениях x и y.
Горизонтальное положение пластины в обоих t heaxi s было найдено с помощью метода измерения уровня spirit и метода измерения уровня t heaxi s.
соответствуя угол сервопривода был измерен используя внутреннюю петлю Control в сервоприводе t hedigital используя
команда " читать". Th был определен как угол e o f серв o, где угол platewa s равен нулю по отношению к
горизонталь.. Измеренные углы для системы оказались равными 87 o для направления x и 89 o для направления y
направление движения плиты. Фро М [1], [2], [ 3] экран касания W resistive как использовано по мере того как обрабатывать времени im требовал
больше вычислительной мощности по сравнению с аналоговым датчиком. Экран касания обеспечивает signal f o R каждое
изменение по зиции алгоритма управления бал л. т он ПИД был имплемэнт я н Атмега2560 управления ЕР
и данные сенсора также были ретушированы b y controller. Заданная точка отсчета сравнивалась с входным сигналом
с сенсорного экрана для конкретного вида Fi c direction и соответствующего G PID controller выход был передан на сервопривод
ранг o f t hecontrollabilitymatrix и матрица observabilityравны степени свободы, которая равна
равно 4. Бал L перемещает I N две оси which добавляет к 2 степени свободы и pl съел i s свободно гнить съел в x и
y аксиома s, которая добавляет еще 2 степени свободы. Следовательно, степень свободы системы является 4. In заказ t o
получитьболеепростойалгоритмуправления MIMO SY stem is s impli fi ed to a simpler comb inati on of 2 sisosy stems.
Согласно модели O F SI SO завод в X-axis и y-axis отдельно параметры PIDcontro l
полученный методом ZieglerNicholsClosed l oop для реальной системы. Согласно передаточной функции на полученной
из ньютоновских законов физики t предельный выигрыш и ультимативный период системы найдены с использованием
СИМУЛИНКЪ.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|