- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Слайд 8. 1.4. Осевое усилие
Слайд 8
| |
| H – дроссельная характеристика насоса; HСЕТЬ 1 – характеристика сети; HСЕТЬ 2 – характеристика сети с дросселем Рисунок 2. 13. Регулирование дросселем. |
Регулирование дросселем – наиболее простой, но и наименее экономичный (рис. 2. 12) способ регулирования подачи.
Пусть дроссельная характеристика H насоса (рис. 2. 13) наиболее экономична при работе с сетью 1 в точке A1, при этом дроссель в сети открыт полностью, подача Q1 максимальна, сопротивление сети равно H1, КПД имеет максимальное значение.
Если подачу нужно уменьшить до Q2, прикрывают дроссель, при этом увеличивается общий коэффициент сопротивления сети, новая характеристика сети 2 пересекается с характеристикой насоса в точке A2 и сопротивление сети составляет Н2. Требуемое давление при уменьшении подачи Q2 без дросселя составляет Н’2, следовательно разница (Н2 – Н’2) является потерями напора на дросселе и определяет непроизводительные затраты энергии. Непроизводительные затраты связаны также со снижением КПД, т. к. зависимость h=f(Q) имеет максимум при подаче Q1. При регулировании дросселем характеристика сети " подстраивается" под характеристику насоса, что, как показано выше, неэкономично.
| |
| А1, А2, А3 – характеристики насоса при разном положении НА Рисунок 2. 15. Регулирование направляющим аппаратом |
Слайд 9
Регулирование направляющим аппаратом (НА) заключается в подстраивании характеристик насоса к характеристике сети без изменения скорости вращения рабочего колеса. НА устанавливается во всасывающем патрубке в непосредственной близости от рабочего колеса и представляет собой совокупность поворотных лопаток.
При максимальной подаче угол поворота j равен нулю, лопатки устанавливаются ребром навстречу всасывающему потоку и не вызывают каких-либо возмущений. При повороте лопаток на угол j > 0 они вызывают закручивание и снижение развиваемого напора, так как появляется составляющая абсолютной скорости с1u (см. параллелограмм скоростей), которая характеризует степень закрутки потока на входе в межлопастной канал рабочего колеса, что приводит, в соответствии с уравнением Эйлера к снижению развиваемого напора: чем больше угол поворота лопаток НА, тем меньше напор насоса (рис. 2. 15).
Непроизводительные затраты энергии значительно меньше, чем при регулировании дросселем (рис. 2. 12); они связаны в случае регулировки НА со снижением К. П. Д, а также с некоторым дросселированием всасывающего потока.
Регулирование изменения геометрии рабочего колеса и лопастей теоретически может дать наилучший результат, но очень сложно, и в насосах, применяемых в промышленной теплотехнике и теплоэнергетике, практически не встречается.
Слайд 10
| |
| А1, А2, А3 – характеристики насоса при разном числе оборотов n: n1 > n2 > n3 Рисунок 2. 16. Регулирование скоростью вращения вала |
Изменение скорости вращения электродвигателя может обеспечить регулирование, близкое к идеальному (рис. 2. 16), однако на практике это не всегда осуществимо: плавное или ступенчатое изменение скорости вращения возможно только на специальных электродвигателях большой мощности, которые дороги и их применение должно быть экономически оправдано.
Частотно-регулируемый привод (частотно-управляемый привод, ЧУП, Variable Frequency Drive, VFD) — система управления частотой вращения ротора асинхронного (или синхронного) электродвигателя. Состоит из собственно электродвигателя и частотного преобразователя.
Без изменения скорости вращения электродвигателя - применение системы приводов в виде редукторов, гидравлических и индукторных муфт и др. для изменения числа оборотов вала насоса целесообразно после экономического анализа, так как возрастает стоимость установки и появляются дополнительные потери мощности в регулирующих устройствах.
Слайд 11
1. 4. Осевое усилие
|
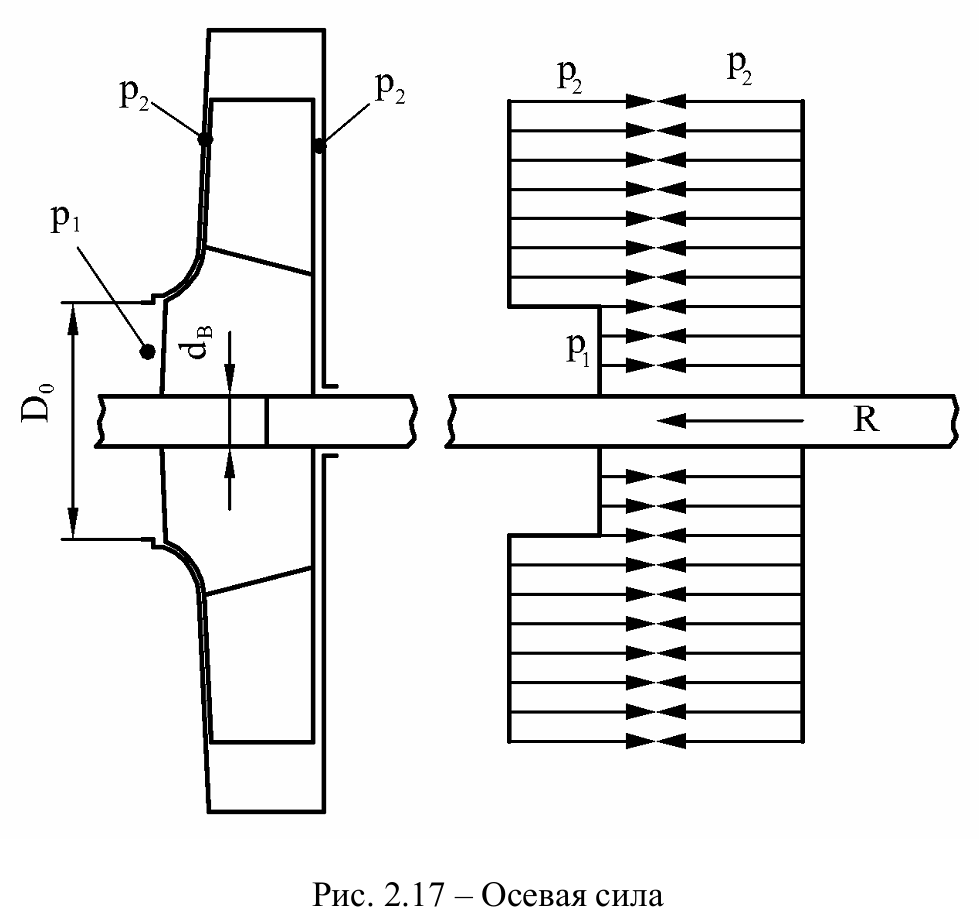
| Рисунок 2. 17. Осевая сила |
На рабочее колесо с передней (обращенной к всасыванию) и задней стороны действует разное давление: в зазоре между колесом и кожухом центробежного насоса действует выходное давление р2, а со стороны входного отверстия диаметром D0 давление р1.
В результате на рабочее колесо одной ступени действует осевая сила (рис. 2. 17), направленная в сторону входного патрубка

В крупных многоступенчатых ЦН осевые силы достигают нескольких десятков тонн.
(Следует заметить, что фактическая осевая сила несколько меньше расчетной, если учитывать динамическое давление потока на входе, а также снижение давления р2 к оси колеса вследствие центростремительных сил).
В одноступенчатых ЦМ малых размеров осевая сила воспринимается упорными подшипниками. В крупногабаритных и многоступенчатых ЦН принимаются специальные меры для снижения осевой силы:
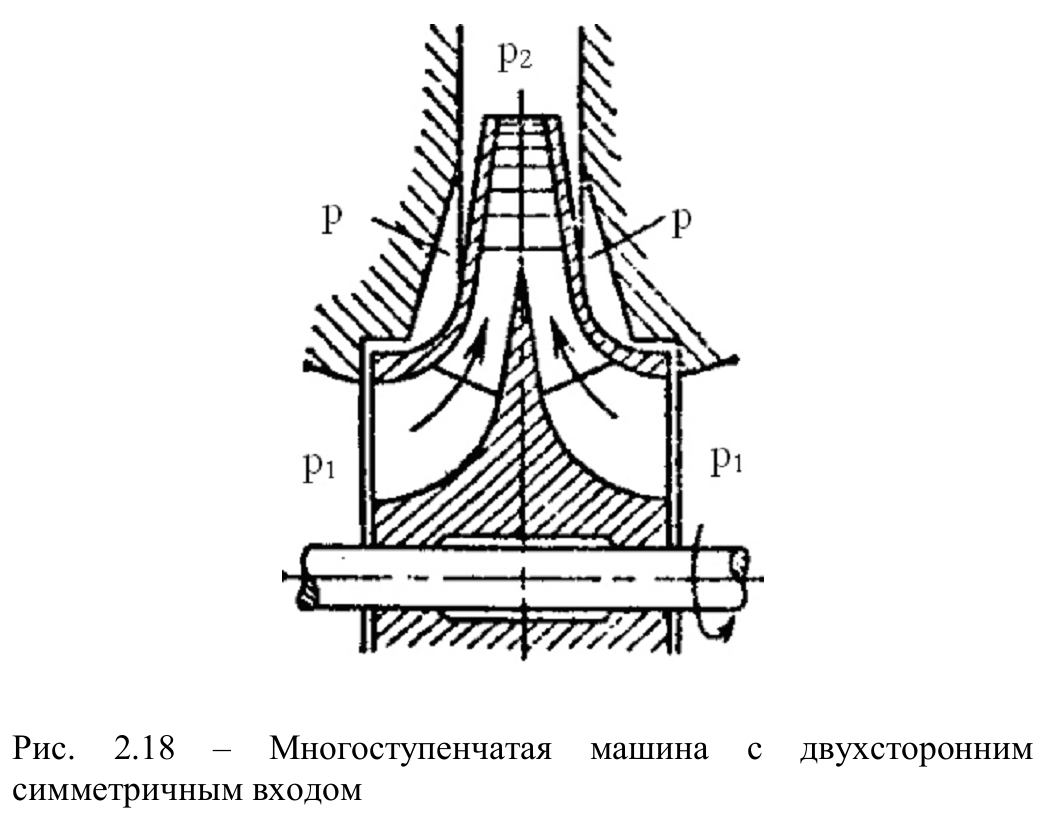
- двусторонний подвод жидкости в рабочее колесо (двустороннее всасывание) (рис. 2. 18);
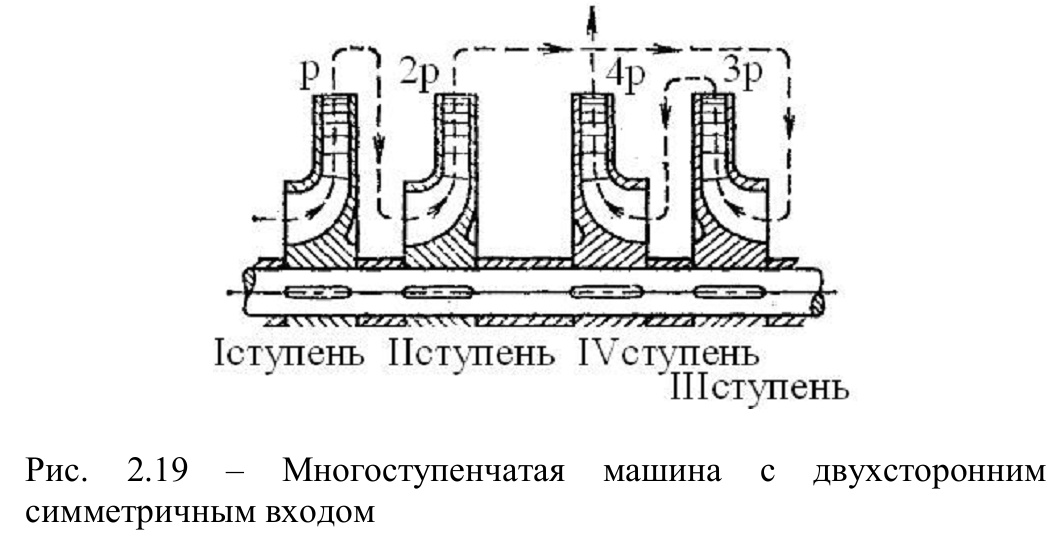
- симметричное расположение рабочих колес многоступенчатого ЦН (рис. 2. 19);
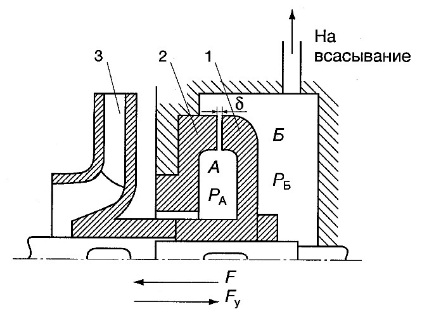
- установка разгрузочного диска (гидравлической пяты) (рис. 2. 20).
В этом варианте с одной стороны на диск действует давление р2. с другой стороны полости всасывания р1. Уравновешивающая осевая сила R' направлена в сторону, противоположную осевой силе R. Подбором диаметра гидравлической пяты DП достигают равенства осевых сил: R = R'.
| 
| 
|
| Рисунок 2. 18. Многоступенчатая машина с двусторонним симметричным входом | Рисунок 2. 19. Многоступенчатая машина с двусторонним симметричным входом | Рисунок 2. 20. Уравновешивание осевой силы при помощи разгрузочного диска (гидравлической пяты) |
Гидравлическая пята устроена следующим образом. На валу насоса за колесом последней ступени (3) установлен диск (1). Полость А между диском и подпятником (2) соединена с отводом последней ступени. В ней устанавливается давление РА, близкое к давлению нагнетания насоса. Полость Б соединена ко всасывающей линией. Зазор δ между диском и подпятником мал, что способствует поддержанию разности давлений РА – РБ и уменьшает утечку из нагнетания в область всасывания. Разность давлений РА – РБ создает уравновешивающую силу Fу.
Если при изменении режима работы увеличится осевая сила, то баланс сил нарушится, и ротор сместится в направлении большего усилия. При этом уменьшится зазор δ, возрастет разность давлений РА – РБ, баланс сил восстановится, и ротор вернется обратно. Аналогичное явление, произойдет, если в некоторый момент будет Fу > Fос.
Гидравлическая пята является саморегулирующимся устройством, и поэтому при ее применении установка упорного подшипника не требуется.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|