- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Лекция № 12. ТЕМА ЛЕКЦИИ. Автоматизация измерений . Рекомендуемая литература
Лекция № 12
ТЕМА ЛЕКЦИИ
Автоматизация измерений
Цель лекции – изучить современное состояние автоматизации измерений
План лекции:
1. Измерительные системы…………………………………... 20 мин.
2. Микропроцессоры в измерительной технике…………….. 20 мин.
3. Виртуальные приборы……………………………………. .. 20 мин.
4. Измерительные роботы…………………………………….. 20 мин.
Рекомендуемая литература
1. А. Г. Сергеев, М. В. Латышев, В. В. Терегеря. Метрология, стандартизация и сертификация. Стр. 13-37.
2. А. С. Сигов, В. И. Нефедов. Метрология, стандартизация и технические измерения. Стр. 14-41
Вводная часть
В целях повышения психологического настроя студентов на восприятие данной дисциплины в начале каждой лекции целесообразно проводить короткий опрос по материалу предыдущей лекции.
Вопросы для контроля:
а) Какие основные блоки аналогового электронного вольтметра?
б) Что понимается под дискретизацией и квантованием?
Требовать от отвечающих студентов представления перед ответом по форме: «Студент Сергеев. Группа ЭП – 1 – 04». Оценки заносить в журнал преподавателя.
После опроса объявить тему и цель лекции.
Основная часть
1. Измерительные системы
Основные направления автоматизации измерений связаны с необходимостью за ограниченное время одновременно измерять, регистрировать значительное число параметров и перерабатывать большие потоки информации. Успешное решение этих задач во многом зависит от взаимосвязанного развития таких научных направлений, как информатика, измерительная и вычислительная техника, автоматизация производственных процессов, новых технологий и др. Автоматизация методов и средств измерений, процессов управления, хранения а анализа данных привела к созданию магистрально-модульных измерительно-вычислительных систем на основе компьютера. Одним из достижений измерительной техники является использование в приборах встроенных микропроцессоров для управления, вычислений по определенному алгоритму. Аналоговые приборы вытесняются многофункциональными цифровыми приборами, выполненными по современной интегральной технологии. Кроме визуальной индикации измерительной информации в десятичной системе цифровые приборы имеют выход в двоично-десятичном коде для ввода в компьютер и на принтер, тем самым расширяется непрерывный контроль параметров систем с регистрацией контролируемых значений и сигнализацией при выходе за пределы нормы. Наличие микропроцессоров дает возможность полностью автоматизировать работу цифровых измерительных приборов: осциллографа, мультиметра, измерителей частоты и временных интервалов, построенных на единой основе, мостов переменного тока и других приборов с программным управлением, что повышает эффективность экспериментального исследования многих процессов и одновременно облегчает процесс измерения.
Разнообразие задач, решаемых с помощью средств измерительной техники, влечет за собой разработку разных по структуре и назначению измерительных систем от простейших, где ПК является внешним звеном, предназначенным лишь для обработки результатов измерений, до сложных структур, где ПК используют не только для обработки информации, но и для управления. Развитие этих систем позволяет получать измерительную, контролирующую, диагностическую информацию за ограниченное время и при минимальном участии человека.
Ранее характеристики измерительных систем традиционно определялись поставщиком (разработчиком). Эти системы имели ограниченные возможности и являлись закрытыми. Пользователь ПК создает гибкие многофункциональные настольные системы с возможностью подключения к сети.
Функционально объединенная совокупность средств измерений, компьютеров и вспомогательных устройств образует измерительно-вычислительный комплекс, на базе которого можно строить измерительные системы.
Измерительные системы выполняют прямые, косвенные совокупные, совместные измерения с соответствующей математической обработкой согласно задаче. Они имеют нормированные метрологические характеристики.
Измерительную систему, перестраиваемую в зависимости от измерительной задачи, называют гибкой измерительной системой. В зависимости от назначения измерительные системы разделяют на измерительно-информационные, телеизмерительные, контролирующие, идентификации, технической диагностики и др.
Систему, в которой предусмотрена возможность представления информации оператору, называют измерительно-информационной системой,
Система, которая обслуживает объект, находящийся от нее на значительном расстоянии, называют телеизмерительной.
Контролирующие системы осуществляют непрерывное сравнение данных, полученных в процессе измерения и определяющих состояние объекта, с установленными нормами, что позволяет оценить соответствие текущего состояния объекта заданному. В результате система контроля выдает информацию об отклонениях от заданной нормы.
Системы идентификации (распознавания образа) являются разновидностью контролирующих систем и предназначены для установления соответствия между объектом и заданным образом. Так же как и при контроле, норма при распознавании образа может быть задана в виде образцового изделия или перечня определенных свойств и значений параметров (признаков) с указанием полей допуска.
Системы технической диагностики осуществляют измерение параметров, определяющих состояние объекта, сравнивают совокупность полученных данных с заложенными в память и определяют состояние диагностируемого объекта. Затем выдают информацию о неисправностях и повреждениях, на основании которой находят места повреждения и устанавливают причины этих повреждений и неисправностей; выявляют элементы, послужившие причиной неправильного функционирования, и восстанавливают нормальную работу объекта.
Для проведения измерений и тестирования сегодня большинство экспериментаторов используют ПК и разнообразные устройства сбора данных.
Получение достоверных результатов в системе сбора данных, построенной на ПК, зависит от следующих элементов системы: измерительных преобразователей; устройства предварительной обработки сигнала; платы сбора данных (платы расширения); платы персонального компьютера программного обеспечения; объекта исследования (ОИ) с датчиком.
Датчик — конструктивно обособленный первичный преобразователь, на который непосредственно воздействует измеряемая физическая величина (от которого поступают измерительные сигналы).
Соединение функциональных блоков может иметь вид: цепочечной одноступенчатой структуры; радиальной одноступенчатой структуры, в которой управление работой блоков, их взаимодействием, порядком обработки информации ведется централизованно контроллером; магистральной одноступенчатой структуры с централизованным управлением.
На рис. 12. 1 представлена обобщенная структура измерительной системы (ИС) в модульно-магистральном исполнении. Особенность данной структуры — наличие общей шины — магистрали.
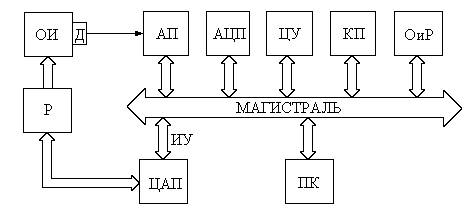
Рис. 12. 1. Обобщенная структурная схема измерительной системы
Магистраль содержит внутрисистемные шины связи, по которым передаются сигналы взаимодействия между функциональными блоками (модулями). Общая шина содержит: шину управления, которая принимает и подает управляющие сигналы на функциональные блоки, определяет режим их работы; шину данных, которая служит для приема, передачи основных данных результатов измерения; шину адреса, которая однозначно определяет блоки, обменивающиеся информацией.
Группа датчиков (Д) преобразовывает однородные или разнородные по физической природе величины (механические, электрические, тепловые, акустические и др. ) в электрические. Входные величины, воспринимаемые первичными преобразователями (датчиками), могут быть независимыми и взаимосвязанными, изменяться во времени и быть распределенными в пространстве. Кроме классических датчиков (резистивных, емкостных, индуктивных, термоэлектрических, интегральных и др. ) используются телевизионные, рентгенографические, голографические.
Аналоговые преобразователи (АП) выполняют предварительную обработку сигналов с целью приведения их к уровню рабочего диапазона входных напряжений АЦП. Содержат многоканальные коммутаторы аналоговых сигналов, масштабные, унифицирующие (нормирующие) преобразователи, предусилители, согласующие устройства, аналоговые каналы связи.
В состав аналого-цифровых преобразователей (АЦП) входят схемы выборки и хранения, компараторы.
Цифровые устройства (ЦУ) включают формирователи импульсов, таймеры, преобразователи кодов, цифровые коммутаторы, специализированные цифровые вычислительные устройства, устройства памяти.
Каналы передачи (КП) содержат каналы цифровой связи, модемы, оптические линии связи, формирователи помехозащшценных кодов.
Устройства отображения и регистрации (ОиР) отображают и регистрируют результаты измерений. К ним относятся печатающие устройства, накопители информации на магнитной ленте, дисках, жидкокристаллические дисплеи, матричные экраны, цифровые индикаторы, сигнализаторы.
К цифроаналоговым преобразователям (ЦАП) относятся выходные мультиплексоры, мощные усилители и формирователи выходных импульсов.
Регуляторы (Р) представляют собой различные исполнительные устройства (реле, нагреватели и др. )
Интерфейсные устройства (ИУ) служат для сопряжения отдельных блоков между собой и с системой.
Устройства управления (УУ) реализуются на базе микропроцессора или ПК.
При реализации ИС для конкретной измерительной задачи не обязательно наличие всех функциональных блоков.
Характерные области применения измерительных систем: управление технологическими процессами, испытание и контроль различных изделий, научные исследования. Наиболее рациональный принцип построения измерительных систем — принцип агрегатирования. Измерительная система выполняется из независимых функциональных блоков (модулей): АЦП, ЦАП, цифровые приборы (мультиметр, частотомер, генератор, таймер, дисплей, печатающее устройство и т. п. ). Агрегативный принцип позволяет использовать различные сочетания блоков, создавать многообразие систем с широкими функциональными возможностями. Это гибкие системы, которые можно легко наращивать и изменять программное обеспечение.
Для нормального функционирования ИС должна быть обеспечена совместимость: информационная, функциональная, энергетическая, метрологическая, конструктивная, эксплуатационная.
Информационная совместимость обеспечивается согласованностью входных и выходных сигналов по виду, диапазону изменения, унификацией измерительных сигналов и применением стандартных интерфейсов, под которыми понимаются как средства сопряжения отдельных модулей и блоков, так и правила обмена информацией между блоками.
Функциональная совместимость подразумевает, что все используемые в системе средства измерения (блоки) четко определены, разграничены и взаимоувязаны.
Метрологическая совместимость обеспечивается согласованностью метрологических характеристик отдельных блоков, условиями эксплуатации и их надежностью.
Погрешность системы определяется многими факторами, такими, как свойства объекта, метрологические характеристики средств измерений, используемых в системе, взаимное влияние каналов, погрешности квантования и дискретизации, алгоритм обработки и т. п. Анализ погрешностей может быть выполнен методом математического моделирования или экспериментально.
Конструктивная совместимость достигается унификацией элементов конструкций, использованием единых прогрессивных технологических процессов производства и сборки конструкций, что обеспечивает удобство использования и соблюдение единого стиля оформления.
Эксплуатационная совместимость означает согласованность характеристик модулей (блоков) по надежности и стабильности, а также характеристик, определяющих влияние внешних факторов.
2. Микропроцессоры в измерительной технике
Микропроцессор является функциональным устройством с фиксированным интерфейсом, предназначенным для реализации заданной системы команд. Микропроцессор выполняет функции программного управления и математической обработки информации. Благодаря высокой степени интеграции схем, образующих процессор, последний характеризуется миниатюрными размерами, незначительной массой и малым потреблением энергии, а также обладает таким важным свойством, как встраиваемость.
С использованием МП в цифровых измерительных приборах расширяются функциональные возможности последних, им придаются новые свойства. Приборы превращаются в системные комплексы, улучшаются их характеристики, повышается точность измерения, быстродействие, реализуется автоматизация измерения и последующая обработка больших объемов информации, обеспечивается удобство управления прибором. МП встраиваются в цифровые вольтметры, мультиметры, цифровые и лю-минофорные осциллографы, анализаторы спектра, частотомеры, мосты и компенсаторы переменного тока, регистраторы переходных процессов (логгеры), измерители неэлектрических величин и другие приборы. Использование микропроцессора и интерфейса в измерительной аппаратуре открывает большие перспективы по созданию «интеллектуальных» приборов недоступной ранее сложности с меньшими затратами и меньшим числом компонентов. Сложный измерительный прибор приближается к вычислительным системам, в нем используются шины с определенными характеристиками, программные средства.
В измерительных приборах МП могут выполнять следующие операции:
● автокалибровку;
● автоматическую установку пределов измерения;
● корректировку погрешностей в процессе измерения;
● статистическую обработку данных, определение средних значений измеряемых величин за определенные интервалы времени, вычисление вариаций, дисперсии, среднеквадратических значений и др.;
● определение абсолютных и процентных отклонений от номинальных значений, вычисление отношений максимум-минимум, умножение и деление на константу;
● обработку данных по упрощенным алгоритмам, определение
контролируемых параметров по измеренным значениям и известным зависимостям;
● визуальное отображение и регистрацию данных на осциллографах, дисплеях, обработку по специальным алгоритмам, определение временных интервалов между двумя маркерами, мощности импульсного и среднего значений и др.;
● управление процессами измерения на осциллографах, записи данных в память, сложных видов синхронизации в цифровых осциллографах, формирования знаков и маркерных меток, изменения цвета и интенсивности и др.;
● управление процессом измерения по заданной программе в цифровых мультиметрах, уравновешивания в приборах сравнения, работой отдельных узлов (АЦП, ЦАП и др. );
● диагностику функциональных узлов до начала измерения в осциллографах, мультиметрах и др.
В процессе автоматической диагностики МП анализирует сбои в работе как аналоговых, так и цифровых узлов прибора. В память МП заносится программа, определяющая порядок тестовых операций. Суть операции состоит в подаче на функциональные узлы прибора контрольных эталонных сигналов (для аналоговой части) и кодовых комбинаций (для цифровой части) и сравнение реальных сигналов на выходе с номинальными, заложенными в памяти.
Если прибор с встроенным МП планируется включить в измерительную систему, то это реализуется с помощью приборного интерфейса.
При использовании МП в приборе аналого-цифровой преобразователь перемещается к входу, так как основная доля обработки сигналов осуществляется цифровым способом, т. е. с цифровыми эквивалентами.
3. Виртуальные приборы
Использование компьютерных технологий в контрольно-измерительной аппаратуре позволило создавать «виртуальные» измерительные приборы, представляющие собой синтез одной или двухплат сбораданных, персонального компьютера и программного обеспечения.
Открытая архитектура компьютера дает возможность устанавливать платы первичного сбора данных непосредственно в слоты расширения компьютера. Это позволяет компактно разместить на плате расширения процессорной шины ПК такие устройства первичного сбора данных, как АЦП, ЦАП, платы цифрового и таймерного ввода-вывода. Платы расширения выполняются и в виде самостоятельного блока, подключаемого к параллельному LPT - порту компьютера.
Многофункциональные и специализированные платы расширения (Plug in card), добавленные к компьютеру и оснащенные необходимым программным обеспечением (LabView, LabWindows PcLab 2000 b др. ), дают возможность экспериментатору создавать свои виртуальные приборы. Эти приборы обладают всеми вычислительными возможностями компьютера, могут выполнять любые задачи по сбору и обработке данных, их представлению и хранению, выполняют масштабирование, статистический анализ, временной и спектральный анализ. Представление данных и результатов анализа также реализуется при помощи компьютера с использованием компьютерной графики, позволяющей создавать с помощью программных средств передние панели прибора. Это новый класс быстродействующих готовых к работе программируемых приборов.
На базе компьютера может быть реализован целый комплекс виртуальных приборов: цифровых осциллографов, мультиметров, генераторов сигналов произвольной формы, анализаторов спектров, логических анализаторов состояний для тестирования цифровых интегральных схем и др. Использование встроенной внутри компьютера звуковой карты позволит виртуальным приборам работать в частотном диапазоне до 20 кГц и динамическом — до 1В.
Достоинства измерительных приборов на основе компьютера:
● неограниченное фиксирование данных;
неограниченные возможности отображения;
● расширенная функциональность;
● встроенные мультимедийные инструкции оператора по процедуре измерения (текст, изображение и др. );
● настраиваемый пользовательский интерфейс;
● доступ в Интернет для обмена данными;
● связь с корпоративными базами данных и информационными
● автоматическое создание отчетов;
● высококачественная печать;
● самокалибровка;
● самодиагностика.
Приборы на основе ПК занимают меньше места, дешевле, но по функциональным возможностям эквивалентны традиционным измерительным приборам.
Разработанная (эмулированная пользователем) программная панель, похожая на панель измерительного прибора, системные программы (драйверы) расширяют и облегчают практическое взаимодействие с прибором. При этом пользователь может компоновать множество передних панелей конкретного прибора, каждая из которых соответствует его определенной функции и может динамически заменяться другой с помощью простой программной инструкции или оператора. Можно использовать даже несколько виртуальных приборов, одновременно отображая их передние панели в нескольких окнах.
Концепцию виртуальных приборов предложила американская фирма National Instruments, которая на сегодняшний день предлагает ряд интересных разработок. Виртуальные приборы весьма перспективны и имеют большое будущее.
4. Измерительные роботы
Автоматизация в крупносерийном производстве экономически выгодна на основе специализированных автоматических линий. Для мелко- и среднесерийного производства при частой сменяемости выпускаемых изделий более выгодно идти по пути создания безлюдной технологии и использования перепрограммируемых промышленных роботов. Но в этом случае часто требуется точное позиционирование, например, контролируемых деталей. Серийно выпускаемые роботы обеспечивают точность позиционирования -0, 1 мм.
Точность позиционирования определяет, например, выполнение тех контрольных операций деталей, зазоры между калибром и деталью в которых соизмеримы с этой точностью. При меньших допусках в захватном устройстве монтируется специальная головка или в системе управления манипулятором используются корректирующие обратные связи с датчиком очувствления, установленным на захватном устройстве или позиционере, где закреплена основная деталь. Главная функция измерительного робота (ИР) — захват и перемещение предмета (детали, измерительного средства) на требуемую позицию в сориентированном положении и в нужный момент времени. На основе использования ИР можно:
● осуществлять метрологические процессы, которые по условиям производства невозможны с участием человека (токсичная, запыленная, загазованная, взрывоопасная среда, высокий уровень радиации рабочего пространства, сверхвысокие быстродействия, монотонные и тяжелые операции и т. п. );
● достичь высокой производительности контроля в условиях быстрой сменяемости производства (гибкого автоматизированного производства), сокращения сроков обучения метрологическим приемам при выпуске новой продукции.
Робот может осуществлять:
● качественную оценку состава рабочей среды;
● установить присутствие определенных объектов, их счет, возможное расположение, дать качественную оценку, сортировку;
● оценку значения параметров имеющихся или изготовляемых предметов (деталей);
● определение правильности функционирования отдельных объектов или их частей.
Роботы первого поколения предназначены только для перемещения грузов различной массы.
Роботы второго поколения являются уже «очувствленными». Для «очувствления» они снабжены различными датчиками, выдающими информацию о состоянии рук, предметов и среды. После преобразования сигналы обрабатываются в ЭВМ и позволяют осуществить управление исполнительными устройствами с учетом фактических ситуаций. По сравнению с роботами первого поколения они обладают повышенной маневренностью, имеют большее число сложных программ и позволяют управлять оборудованием, автоматизировать контроль сборки и другие процессы в производстве с частым изменением условий. Роботы третьего поколения (интегральные роботы) имеют искусственный интеллект, высокую степень восприятия и распознавания обстановки, способность выработки решений автоматического планирования и контроля операций. Эти роботы могут изменять свои действия (адаптироваться) под влиянием изменения окружающей среды или под воздействием команд от заданной программы. Они могут обрабатывать, собирать и испытывать отдельные виды изделий, управлять несколькими видами оборудования, контрольно-измерительными установками, следить за состоянием оборудования и ходом производства, осуществлять учет продукции на различных стадиях производства, выполнять некоторые конструкторские, исследовательские и лабораторные работы и т. п. Адаптивные роботы могут определять параметры объекта и окружающей среды, оценивать реальную картину, изменять последовательность действий. Применение микропроцессорных систем контроля позволяет объединять приборы, выполняющие различные функции, в одну контрольно-измерительную систему. В результате совершенствования микропроцессоров и увеличения числа выполняемых ими функций стали появляться универсальные многофункциональные системы — мультиметры. Так, например, использование микропроцессоров в электрических мостовых контролирующих устройствах позволяет при контроле получить на выходе такого устройства одновременно данные о емкости, сопротивлении утечки, тангенсе угла потерь конденсатора и катушки индуктивности, активном и индуктивном сопротивлениях, а также добротности катушки индуктивности. Микропроцессор может управлять временем измерения, осуществлять выбор диапазона измерения, выполнять функции интерфейса. Кроме того, он может обеспечивать автоблокировку, самодиагностирование, статистический анализ, коррекцию ухода нуля, линеаризацию характеристик измерительных преобразователей.
5. Заключительная часть
Общие указания, контроль присутствия.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|