- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Блоки работы с датчиками
Одно из основных отличий образовательного конструктора LegoWeDo 2. 0 от обычного конструктора – это наличие датчиков, позволяющих роботам взаимодействовать с окружающим миром. Появление препятствий, удаление объектов, изменение наклона плоскости или управление джойстиком – все эти события внешнего мира нужно уметь понимать на программном уровне. Для этого в среде программирования WeDo 2. 0 предусмотрены блоки расширения, которые считывают информацию с датчиков.
Датчик расстояния может работать в трех режимах:
· объект приближается (блок расширения со стрелкой, указывающей на датчик)
· объект отдаляется (блок расширения со стрелкой, указывающей от датчика)
· объект изменяет свое положение (блок расширения со стрелкой, указывающей в обе стороны)
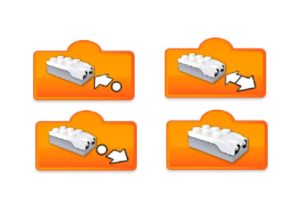
Также имеется блок расширения без стрелок, изображающий датчик расстояния – он используется в случаях, когда требуется получить числовое значение датчика в конкретный момент времени.
Датчик расстояния считывает расстояние по шкале от 0 до 10 условных единиц, максимальная граница соответствует 15-18 сантиметрам.
В свою очередь датчик наклона считывает наклон в двух плоскостях, при этом разработчик закодировал каждое положение соответствующей цифрой:
· наклон носом вверх (к себе)
· наклон носом вниз (от себя)
· наклон влево
· наклон вправо
· отсутствие наклона (датчик расположен горизонтально) «0»
· наклон в любую сторону (режим «тряска»)

|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|