- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Обусловленность матриц и точность решения систем линейных уравнений
Министерство образования Республики Беларусь
УО «Мозырский государственный педагогический университет
имени И. П. Шамякина»
Обусловленность матриц и точность решения систем линейных уравнений
Выполнила:
студентка 2 курса 2 группыфизико-математического
факультета
Пиляк Ксения Юрьевна
Мозырь 2014
ОГЛАВЛЕНИЕ
НОРМЫ ВЕКТОРОВ И МАТРИЦ.. 3
ОБУСЛОВЛЕННОСТЬ МАТРИЦ.. 4
НОРМЫ ВЕКТОРОВ И МАТРИЦ
Нормой вектора  называется поставленное ему в соответствие неотрицательное число
называется поставленное ему в соответствие неотрицательное число  . При этом эта норма удовлетворяет следующим условиям:
. При этом эта норма удовлетворяет следующим условиям:
1)  , при этом
, при этом  тогда и только тогда, когда
тогда и только тогда, когда  .
.
2)  , где
, где  ,
,  .
.
3)  .
.
4) 
В вычислительной математике наиболее широко употребляются три нормы:
 ,
,
 – Евклидова норма.
– Евклидова норма.
Между этими нормами справедливы соотношения
1)  , где
, где  – размерность пространства.
– размерность пространства.
2)  .
.
3)  .
.
Нормой квадратной матрицы A называется поставленное ей в соответствие неотрицательное число  , для которого справедливы следующие свойства:
, для которого справедливы следующие свойства:
1)  тогда и только тогда, когда
тогда и только тогда, когда  .
.
2)  .
.
3)  .
.
4)  .
.
Наиболее употребляются в вычислительной математике следующие нормы матриц:
 , где
, где  – максимальная сумма модулей элементов по столбцам.
– максимальная сумма модулей элементов по столбцам.
 , где
, где  – максимальная сумма модулей элементов по строкам.
– максимальная сумма модулей элементов по строкам.
 – Евклидова норма.
– Евклидова норма.
Нормы матриц и векторов называются согласованными, если они удовлетворяют условию  .
.
Если – точка верхней грани  , то норма называется подчиненной норме вектора .
, то норма называется подчиненной норме вектора .
ОБУСЛОВЛЕННОСТЬ МАТРИЦ
Мы решаем систему вида AX = B в предположении, что матрица коэффициентов А – квадратная и невырожденная, в этом случае рассматриваемая СЛАУ имеет единственное решение.
Вырожденной называется матрица, не имеющая обратной.
На практике встречаются матрицы (и соответствующие системы уравнений), «близкие» к вырожденным. Пусть матрица А «почти» вырожденная. Учитывая, что X = A–1B, можно ожидать, что малые изменения в А и B вызовут очень большие изменения в решении X.
Рассмотрим погрешности решения СЛАУ в этом случае. Пусть «точная» система уравнений имеет вид
А* X* =B*.
Предположим, что вследствие округления и/или неточных данных матрица системы A* и вектор B* заменяются на «приближенные» матрицу А и вектор B. Соответствующая система уравнений запишется как
АX = B.
Погрешности матрицы А, вектора B и ошибку решения будем оценивать:
 ,
,
 ,
,
 .
.
Здесь нормы векторов и матрицы должны быть согласованы между собой.
Можно показать, что справедливо следующее соотношение:
 или
или
 .
.
Из (1) следует, что:
1) ошибка решения  возрастает с ростом погрешностей
возрастает с ростом погрешностей  и
и  ;
;
2) ошибка решения в  раз больше ошибки исходных данных
раз больше ошибки исходных данных  .
.
Величина играет важную роль при анализе погрешностей решения СЛАУ, поэтому она получила специальное название – число обусловленности матрицы А:
 .
.
Обусловленность оценивает близость матрицы коэффициентов А к вырожденной.
Число обусловленности  является количественной оценкой обусловленности.
является количественной оценкой обусловленности.
Если число обусловленности матрицы велико, то необходимому изменению левой или правой части будет соответствовать относительно большое изменение решения.
Причина появления больших погрешностей при решении плохо обусловленных систем хорошо иллюстрируется на примере СЛАУ с двумя неизвестными:
(а)(б)(в)
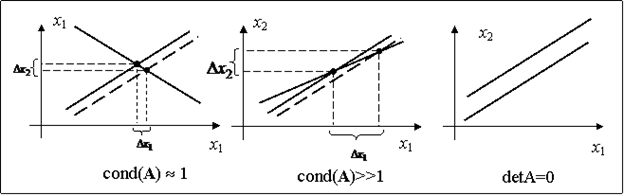
Рисунок 1 – Обусловленность матриц
Рисунок (а) соответствует случаю хорошо обусловленной системы уравнений. На рис. (в) представлен случай системы с вырожденной матрицей А (det(A)=0), здесь прямые, отвечающие каждому из уравнений, параллельны друг другу (уравнения линейно зависимы). Пример плохо обусловленной системы уравнений показан на рис. (б) – прямые, соответствующие двум уравнениям, почти параллельны.
Штриховые прямые на рис. (а) и (б) отвечают одному из уравнений, в котором немного изменены коэффициенты  или правая часть
или правая часть  . Как видно, в случае хорошо обусловленной СЛАУ малые возмущения в величинах и приводят к небольшим изменениям решения (точка пересечения прямых смещается незначительно). В случае плохо обусловленной системы уравнений малые изменения в коэффициентах ведут к большим изменениям в решении (точка пересечения прямых смещается сильно).
. Как видно, в случае хорошо обусловленной СЛАУ малые возмущения в величинах и приводят к небольшим изменениям решения (точка пересечения прямых смещается незначительно). В случае плохо обусловленной системы уравнений малые изменения в коэффициентах ведут к большим изменениям в решении (точка пересечения прямых смещается сильно).
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|