- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Настройка ПИД регуляторов по отклику (Метод №1).
1. Перевести регулятор в ручной режим, дождаться пока стабилизируется процесс и произвести однократное изменение выходного сигнала (выхода на клапан) X, которое обеспечит приемлемый отклик переменной технологического процесса Y (рисунок. 1).
2. После получения отклика вернуться к исходному значению выходного параметра сигнала регулятора. Переменная технологического процесса также должна вернуться к исходному значению. Если различие значительно, повторите попытку отклика.
3. Определить коэффициент усиления процесса (Kp=Y/X), время запаздывания d, и временную константу Т усреднением значений верхнего и нижнего откликов.
4. Рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 1.
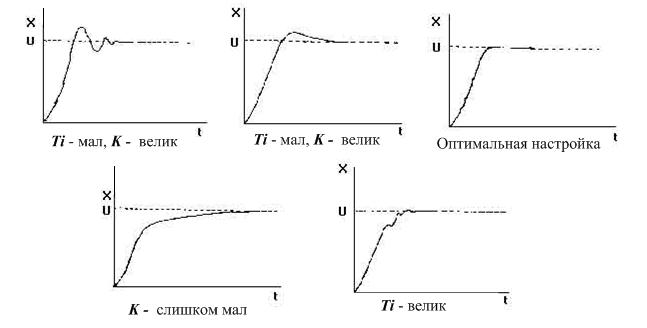
5. Для более устойчивой работы регулятора возможно необходимо будет увеличить временную константу замкнутого контура (E).
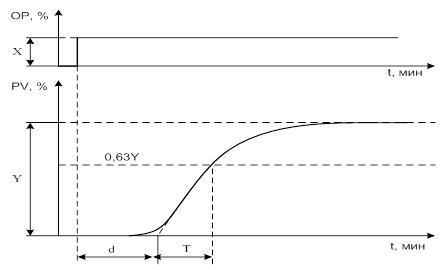
Рисунок 1. Отклик процесса на ступенчатое воздействие.
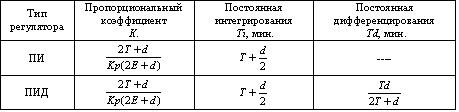
Таблица 1. Формулы вычисления коэффициентов для ПИД регуляторов
Где: Х – значение изменения выходного воздействия (в %);
Y – значение изменения переменной процесса (7);
Kp – коэффициент усиления процесса;
d – время запаздывания реакции процесса (в минутах);
Т – временная константа процесса (в минутах);
E – заданная временная константа замкнутого контура (минуты). Минимально возможное время в течении которого настраиваемый регулятор может привести значение переменной процесса к заданию.
Kp=Y/X E=T+d
Для более устойчивой работы регулятора значение E нужно увеличить.
При настройке каскадных регуляторов, сначала настраивается ведомый регулятор, затем ведущий регулятор. Причем, временная константа E ведущего регулятора должна быть больше временной константы E ведомого регулятора минимум в 5 раз.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|