- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
ЛАБОРАТОРНАЯ РАБОТА № 1. Исследование разомкнутых и замкнутых систем электропривода
Министерство науки и высшего образования Российской Федерации
Федеральное государственное автономное образовательное
учреждение высшего образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Филиал ФГАОУ ВО «ЮУрГУ (НИУ)» в г. Златоусте
Факультет «Техники и технологии»
Кафедра «Электрооборудования и автоматизации производственных процессов»
АЛЬБОМ ЛАБОРАТОРНЫХ РАБОТ
по дисциплине
«Теория электропривода»
| Выполнили: студенты группы ФТТ-333 |
| «__» ____________ 2021 г. |
| Проверил: |
| «__» ____________ 2021 г. |
г. Златоуст
2021 г.
Содержание
ЛАБОРАТОРНАЯ РАБОТА № 1. 3
БИБЛИОГРАФИЧЕСКИЙ СПИСОК.. 8
ЛАБОРАТОРНАЯ РАБОТА № 1
Исследование разомкнутых и замкнутых систем электропривода
Цель работы: изучение процессов в разомкнутых и замкнутых системах преобразователь-двигатель.
Используемое оборудование и программное обеспечение:
– персональный компьютер;
– пакет моделирования VisSim 3. 0.
Исходные данные:
– Кп = 8 (коэффициент усиления);
– Т1 = 0, 1 (постоянная времени преобразователя);
– Т2 = 2 (постоянная времени преобразователя);
– Тм = 2 (электромеханическая постоянная времени двигателя);
– вид обратной связи – ω (отрицательная по частоте вращения ротора).
Ход работы:
1. Для построения логарифмической амплитудной частотной характеристики (ЛАЧХ) составим структурную схему разомкнутой системы (рисунок 1), схема модели представлена на рисунке 2.
|
|
| Преобразователь |
| Двигатель |
| W |
| Iя |
| Uв |
Рисунок 1 – Структурная схема разомкнутой системы преобразователь-двигатель

Рисунок 2 – Схема модели разомкнутой системы преобразователь-двигатель
Максимальный ток якоря для разомкнутой системы:

ЛАЧХ разомкнутой системы приведена на рисунке 3.
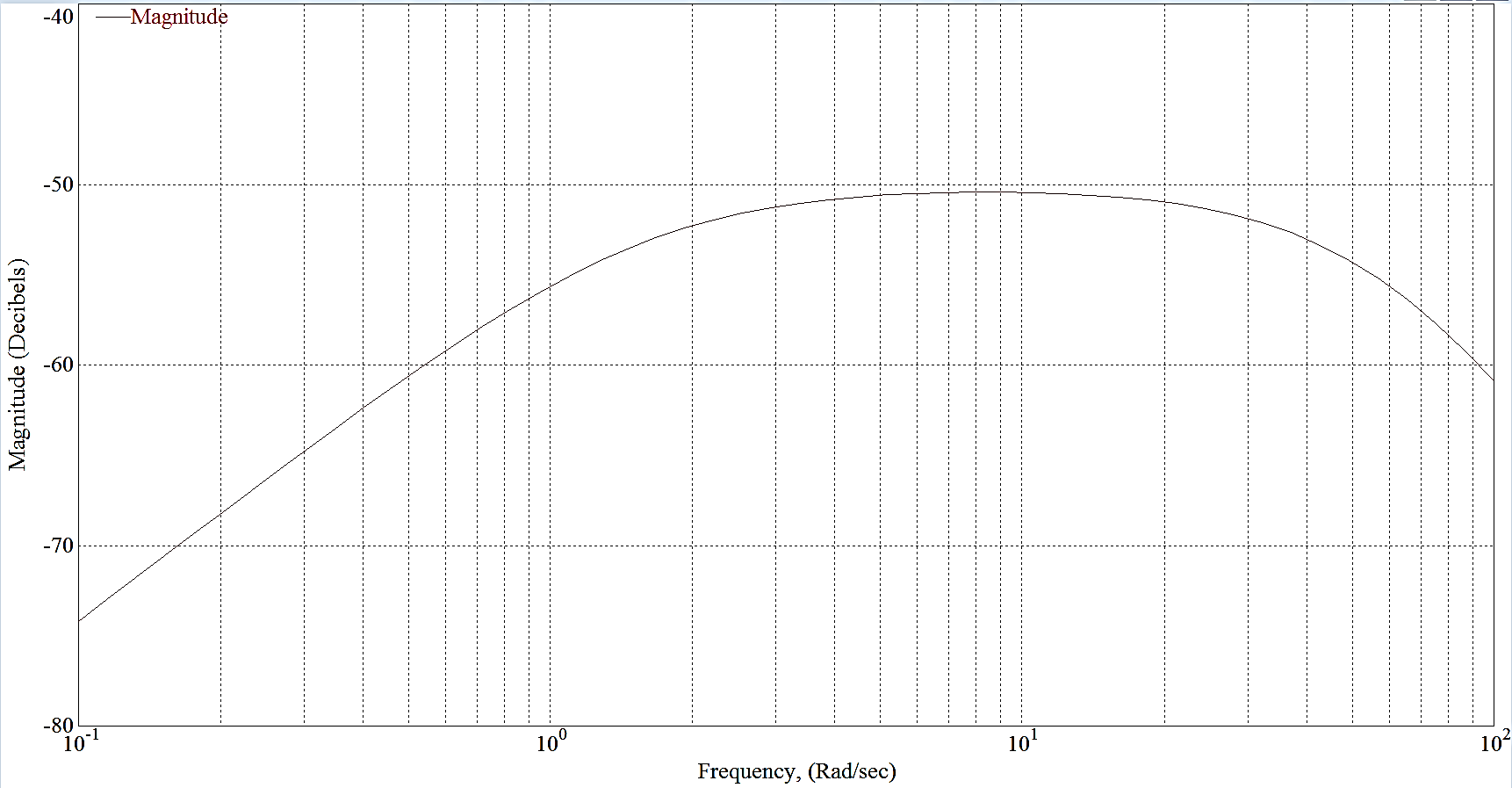
Рисунок 3 – ЛАЧХ разомкнутой системы преобразователь-двигатель
2. Составим структурную схему замкнутой системы (рисунок 4), схема модели представлена на рисунке 5.
|
|
|
|
|
| Преобразователь |
| Двигатель |
| Обратная связь |
| W |
| Iя |
| Uв |
Рисунок 4 – Структурная схема замкнутой системы преобразователь-двигатель
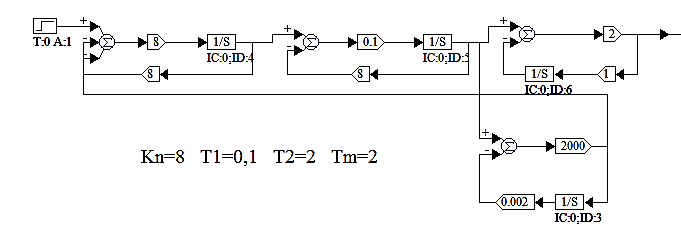
Рисунок 5 – Схема модели замкнутой системы преобразователь-двигатель
ЛАЧХ разомкнутой системы приведена на рисунке 6.
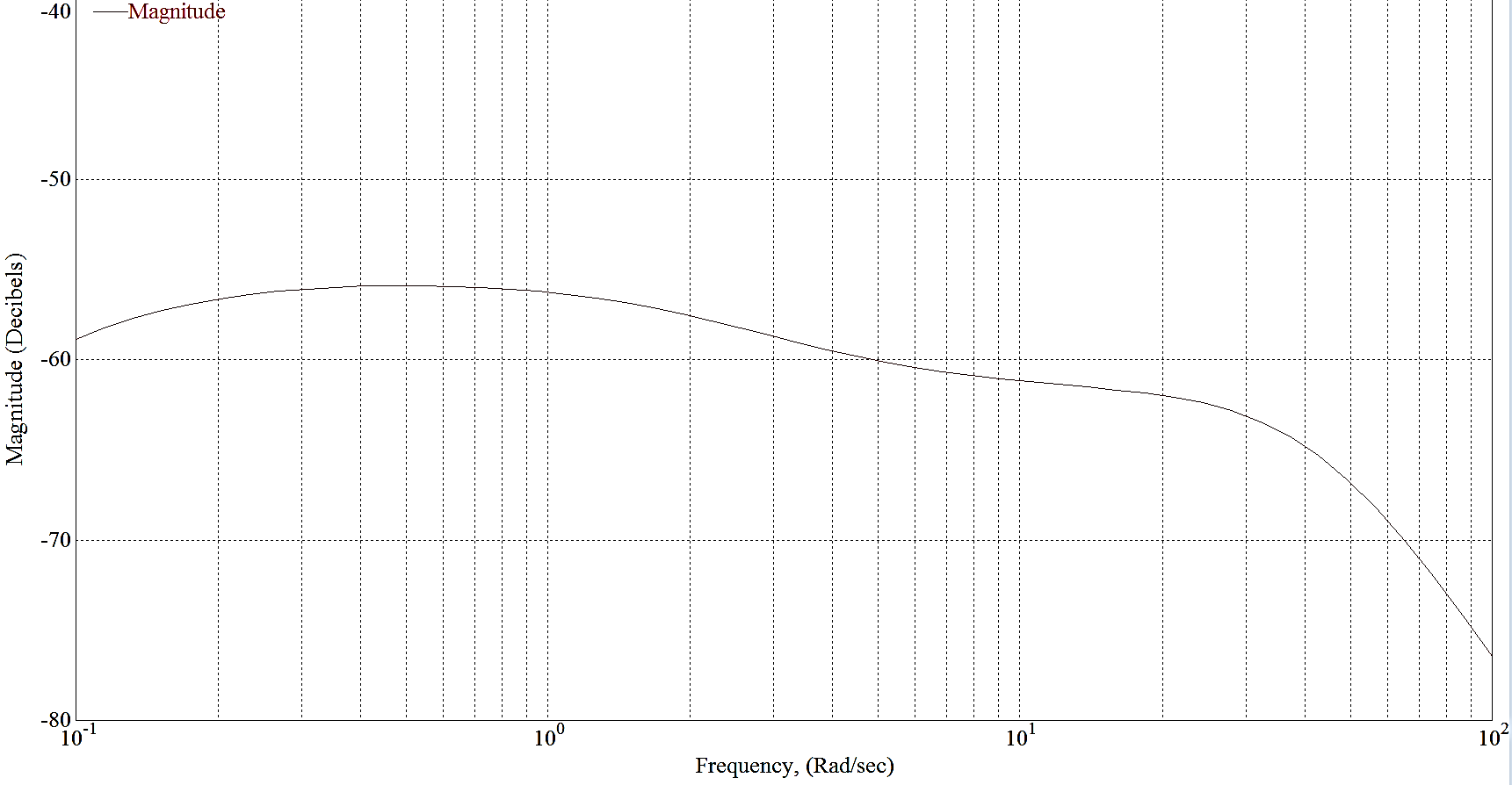
Рисунок 6 – ЛАЧХ замкнутой системы преобразователь-двигатель
3. Расчет переходных процессов
Переходные процессы, построенные по схемам моделей систем (рисунки 2, 5), представлены на рисунке 7.

Рисунок 5 – Переходный процесс в разомкнутой системе
преобразователь-двигатель

Рисунок 7 – Переходный процесс в замкнутой системе
преобразователь-двигатель
Для анализа данных сведем их в таблицу 1.
Таблица 1 – Основные характеристики систем
| Система регулирования | Im, A | tпп, с | tm, с |
| Разомкнутая | 0, 0029 | 3, 2 | 0, 01 |
| Замкнутая | 0, 0015 | 0, 001 |
Вывод: в ходе выполнения лабораторной работы, с помощью математических моделей систем управления были получены ЛАЧХ и графики переходных процессов. Сравнение результатов показало, что замкнутая система позволяет ограничить ток якоря при переходном процессе за счет отрицательной обратной связи.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Сандалов, В. М. Системы электроприводов: учебное пособие к комплексному курсовому проектированию / В. М. Сандалов, Л. Ю. Блажевич. – Челябинск: Издательский центр ЮУрГУ, 2013. – 73 с.
2. Усынин, Ю. С. Системы управления электроприводов/ Уч. пособие. / Ю. С. Усынин – Челябинск: Изд. ЮУрГУ, 2001. – 358с., ил.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|