- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Раздел 3. Проектирование систем управления автомобилей. 9 вопрос –геометрические параметры, необходимые для расчёта рулевой трапеции.
В начале рассчитывается максимальный средний угол поворота управляемых колес, необходимый для движения автомобиля с минимальным радиусом. Согласно схемы, изображенной на рис. 2.
 (1)
(1)
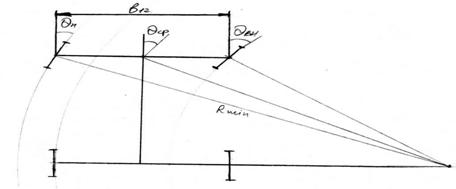
Рис. 2. Схема поворота автомобиля с абсолютно жесткими колесами.
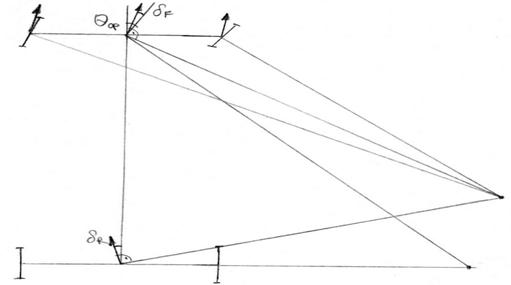
Рис. 3. Схема поворота автомобиля с податливыми колесами.
Для того, чтобы управляемые жесткие колеса катились при повороте без проскальзывания, их мгновенный центр поворота должен лежать на пересечении осей вращения всех колес. При этом наружный qн и внутренний qвн углы поворота колес связаны зависимостью:
 (2)
(2)
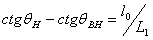
где l0 – расстояние между точками пересечения осей шкворней с опорной поверхностью. Поскольку эти точки практически совпадают для переднеприводных автомобилей с центрами контакта колес с дорогой (что обусловлено малым плечом обкатки и продольным углом наклона шкворня),
 (3)
(3)
Обеспечить такую зависимость возможно лишь при помощи довольно сложной кинематической схемы привода, однако, рулевая трапеция позволяет максимально приблизиться к ней.
Подбор параметров трапеции начинается с определения угла наклона боковых рычагов трапеции. В настоящее время этот угол обычно подбирается на основании опыта проектирования предшествующих моделей.
Далее определяется длина поворотного рычага трапеции. Эту длину принимают возможно большей по условиям компоновки. Увеличение длины поворотного рычага позволяет снизить усилия, действующие в рулевом управлении, как следствие, повысить долговечность и надежность рулевого управления, а также снизить его податливость.
Очевидно, что с увеличением длины поворотного рычага возрастает ход рейки, необходимый для достижения заданного максимального угла поворота управляемых колес.
Потребный ход рейки определяется графическим методом либо расчетным путем. Также графическим либо расчетным путем определяется кинематика рулевой трапеции.
Рис. 4. Зависимость среднего угла поворота управляемых колес от хода рейки
На рис. 5 показана зависимость разности углов поворота наружнего и внутреннего колес в функции угла поворота внутреннего колеса. Здесь же приведена рассчитанная по Аккерману кривая требуемого изменения разности углов поворота колес.
Показателем, служащим для оценки кинематики рулевого привода, является разность углов поворота колес при угле поворота внутреннего колеса, равном 200:
 (4)
(4)
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|