- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Проект: «РОБОТ-ПОГРУЗЧИК»
Проект: «РОБОТ-ПОГРУЗЧИК»
Авторы:
Ищенко Руслан Владимирович, 15 лет, г. Новомосковск,
Фролова Ангелина Павловна, 15 лет, г. Новомосковск.
Руководитель: Ткаченко Анатолий Дмитриевич.
Номинация: «ТВОРЧЕСКИЕ ПРОЕКТЫ»
Тематический раздел: «РОБОТЫ-ПОМОЩНИКИ»
Цель: Моделирование процессов погрузки и разгрузки контейнеров на погрузочно-разгрузочных площадках, отладка и демонстрация выполнения алгоритмов погрузочных и разгрузочных работ с помощью автономного робота.
Краткое описание
Платформа робота конструктор LEGO Mindstorms EV3.
Разгрузочно-погрузочная площадка разбита на квадраты линиями. Робот получает от пульта диспетчера дистанционно координаты квадрата, в котором расположен контейнер. Робот рассчитывает траекторию движения к контейнеру и движется по расчетной траектории к квадрату с контейнером. В заданном квадрате робот по дальномеру уточняет место контейнера, подъезжает к нему, захватывает рукой и доставляет на погрузочную площадку. После разгрузки возвращается в исходное место и ждет передачи координат следующего контейнера от диспетчера.
Программа управления роботом реализует автомат с память и с несколькими состояниями. В каждом состоянии выполняются определенные функции и проверяются условия перехода в другие состояния. Программ решает параллельно задачи навигации и погрузочно-разгрузочных работ.
Функции робота-погрузчика:
1. Получение координат квадрата с контейнером от пульта диспетчера.
2. Расчет траектории движения робота к квадрату с контейнером, на основании данных:
· начальные координаты робота,
· начальное направление робота-погрузчика,
· координаты квадрата с контейнером.
3. Движение к назначенному квадрату с контейнером.
4. Определение текущих координат и направления движения робота-погрузчика.
5. Обнаружение контейнера в заданном квадрате.
6. Захват обнаруженного контейнера.
7. Движение к месту выгрузки.
8. Выгрузка контейнера.
9. Возвращение к исходному положению.
10. Ожидание координат квадрата с контейнером.
Функции пульта диспетчера:
1. Ввод координат квадрата диспетчером.
2. Отправка координат роботу-погрузчику.
3. Ожидание ввода координат квадрата с контейнером.
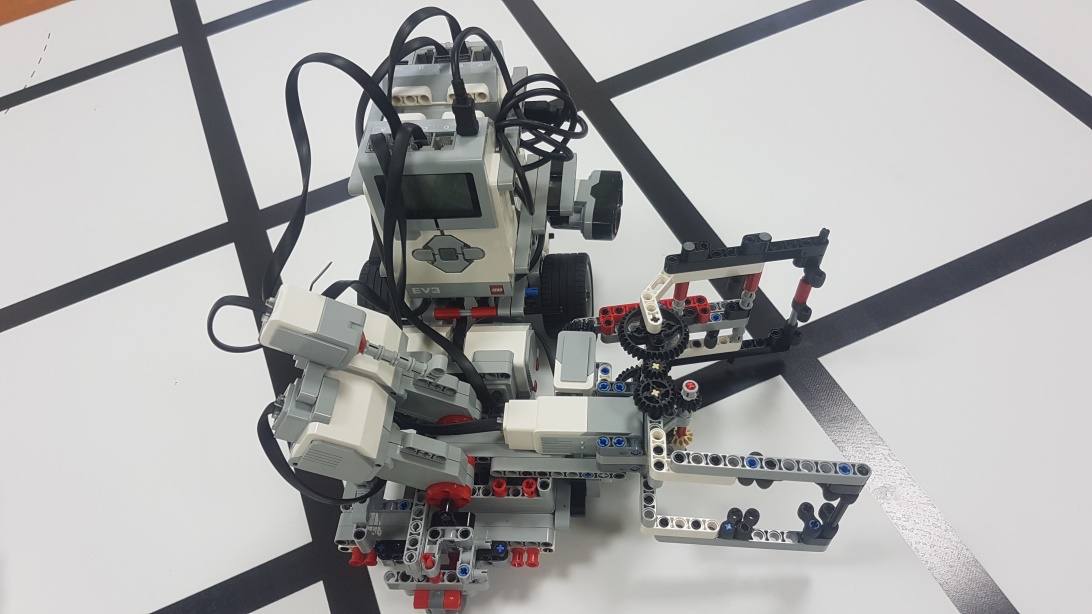
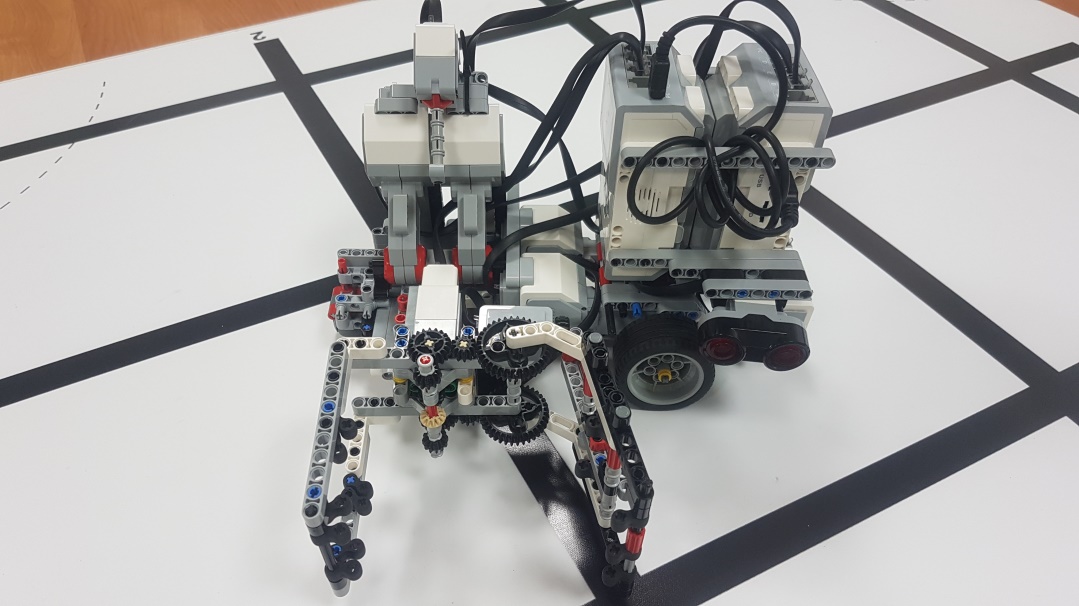
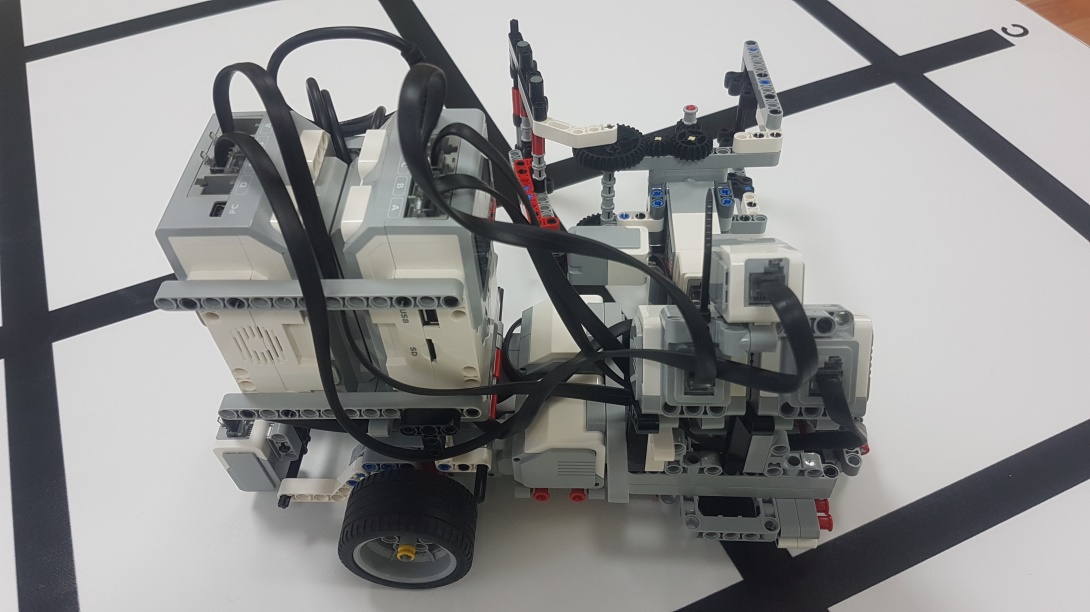
Конструкция робота-погрузчика:
Конструкция: трехколесная платформа с двумя ходовыми двигателями; рука с двумя большими двигателями для подъема и со средним двигателем для захватаконтейнера рукой робота.
Состав робота:
1) Два процессора.
2) Два больших ходовых двигателя.
3) Два двигателя для поворота руки в вертикальной плоскости.
4) Один двигатель поворота пальца руки.
5) Два датчика цветности для обеспечения движения по трассе.
6) Три датчика касания для определения положения руки и ее пальца.
7) Один ультразвуковой дальномер для обнаружения контейнеров.
Конструкция пульта диспетчера: Один процессор LEGO Mindstorms EV3.
Ссылки на фото и видео материалы:
https: //vk. com/photo512702795_457239017
https: //vk. com/photo512702795_457239018
https: //vk. com/photo512702795_457239019
https: //vk. com/photo512702795_457239020
https: //vk. com/video512702795_456239017? list=35fa1325f252c431f6
https: //cloud. mail. ru/home/20220310_161238%20(1). mp4
https: //cloud. mail. ru/home/20220310_174806.jpg
https: //cloud. mail. ru/home/20220310_174821.jpg
https: //cloud. mail. ru/home/20220310_174836.jpg? weblink=r6xQ/aryJaoGwx
https: //cloud. mail. ru/home/20220310_174901.jpg

|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|