- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Программа для поворота робота ev3
1 действие. Движение вперёд робота ev3. Моторы робоат ev3 подключаются к портам с буквами: A B C D Все повороты делаются на мощностях меньше50. Сбрасываем датчик моторов в ev3. 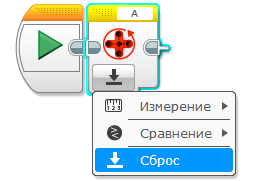
2 действие. Ставим цикл и в него ставим моторы на режиме «включить». 
3 действие. Выставляем мощность мотора на 100. 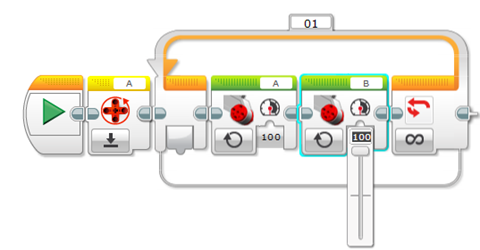
4 действие. Заходим в цикл, выставляем вращение мотора «градусы». 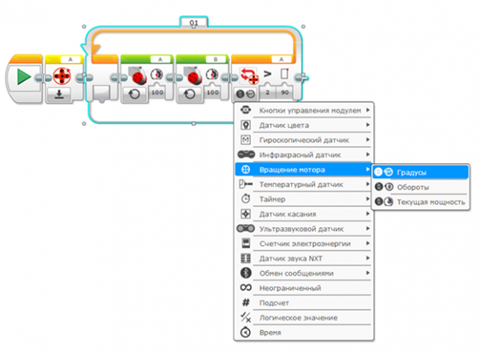
5 действие. Полный оборот колеса 360 градусов. 
6 действие. Остановка моторов в режиме «выключить». Повороты робота EV3.
Программа для поворота робота ev3
1 действие. Чтобы робот вращался на месте как трактор используется реверсивный поворот, когда один мотор двигается в одну сторону, а другой в противоположную. Чтобы мотор начал вращаться назад, необходимо выставить мощность -100. 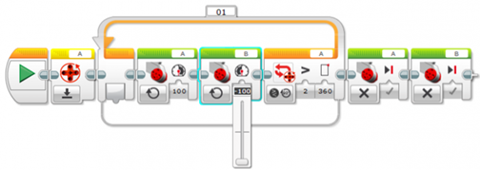
Поворот робота ev3 в другую сторону
1. действие. Чтобы поворачивать в другую сторону, необходимо поменять мощности моторов. Теперь мотор с портом A будет с отрицательной мощностью. 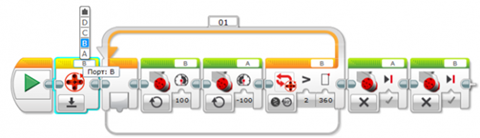
Движение робота EV3 назад
Чтобы обеспечить движение робота ev3 назад, устанавливаем отрицательную мощность обоих моторов. Действие 1. 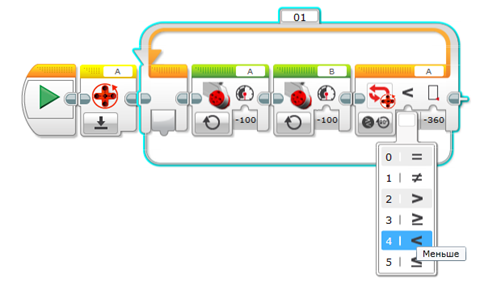
В условии цикла необходимо будет поставить знак «меньше».
Действие 2. 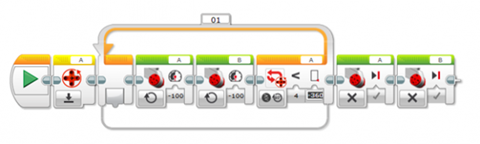 Ставим отрицательные значения градусов.
Ставим отрицательные значения градусов.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|