- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Синхронные двигатели
 Синхронный двигатель не имеет принципиальных конструктивных отличий от синхронного генератора. Так же как и в генераторе, на статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока создается вращающееся магнитное поле, число оборотов в минуту которого равно:
Синхронный двигатель не имеет принципиальных конструктивных отличий от синхронного генератора. Так же как и в генераторе, на статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока создается вращающееся магнитное поле, число оборотов в минуту которого равно:

На роторе двигателя помещена обмотка возбуждения, подключаемая к источнику постоянного тока. Ток возбуждения создает магнитный поток полюсов. Вращающееся магнитное поле, возбуждаемое токами обмотки статора, увлекает за собой полюсы ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
На рис. 136 результирующее магнитное поле статора и поле ротора в некоторой точке окружности статора изображены полюсами различной полярности (N и S). При вращении поле статора увлекает за собой полюсы ротора так, что магнитные поля статора и ротора вращаются синхронно, со скоростью v. Если на валу двигателя никакой нагрузки нет, т. е. он работает вхолостую, то, пренебрегая механическими потерями в двигателе (трением в подшипниках и трением о воздух вращающихся частей машины), можно считать, что ротор следует за полем статора и оси магнитных полей статора и ротора совпадают, т. е. угол между осями магнитных полей статора и ротора θ = 0 (рис. 136, а). Если на валу двигателя приложить некоторый тормозной момент Мт, развиваемый приемником механической энергии, то ротор на какой-то отрезок времени уменьшит свою скорость. Магнитное поле статора, вращающееся с неизменной скоростью, начнет перемещаться относительно ротора,
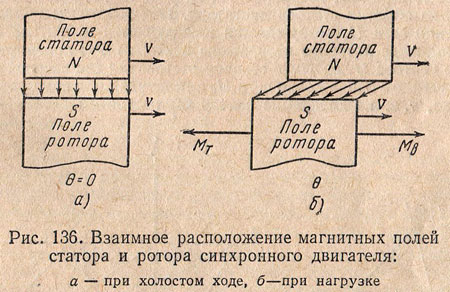
и угол между осями полей статора и ротора θ не будет равен нулю (рис. 136, б). При этом магнитные линии, растягиваясь и стремясь замкнуться кратчайшим путем, будут воздействовать на ротор так, чтобы ось поля ротора приблизилась к оси поля статора. Таким образом, при появлении угла между ссями магнитных полей статора и ротора θ двигатель развивает вращающий момент Мв. После восстановления равновесия моментов, когда вращающий момент станет равен моменту тормозному (Мв = Мт), ротор вновь будет вращаться синхронно с полем статора при неизменной величине угла θ.
При увеличении нагрузки двигателя, т. е. при увеличении тормозного момента на его валу Мт, ротор вновь несколько уменьшит свою скорость и угол θ начнет увеличиваться. Магнитные линии растягиваются больше, увеличивая вращающий момент Мв и равновесие моментов Мв = Мт наступает при большем значении угла θ. Уменьшение нагрузки на валу двигателя вызывает уменьшение угла θ.
Таким образом, у синхронного двигателя, так же как и у синхронного генератора, работающего на мощную сеть, изменение нагрузки вызывает изменение угла между осями магнитных полей статора и ротора. Отличительной особенностью двигателя является то, что если у генератора поле ротора было опережающим по отношению к полю статора, то у двигателя поле статора является опережающим, а поле ротора — отстающим.
Изменение нагрузки двигателя вызывает соответствующее изменение активной мощности, потребляемой им из сети. Это легко понять из векторной диаграммы, изображенной на рис. 137, a, и построенной для одной фазы обмотки статора двигателя. Под действием приложенного напряжения сети Uc возбуждается вращающееся магнитное поле статора, амплитуда которого изображена вектором Φ p, повернутым относительно вектора Uc на 90° в сторону отставания (по часовой стрелке). При неизменном напряжении сети Uc амплитуда поля статора Φ p также неизменна, т. е. на диаграмме вектор Φ p постоянен.
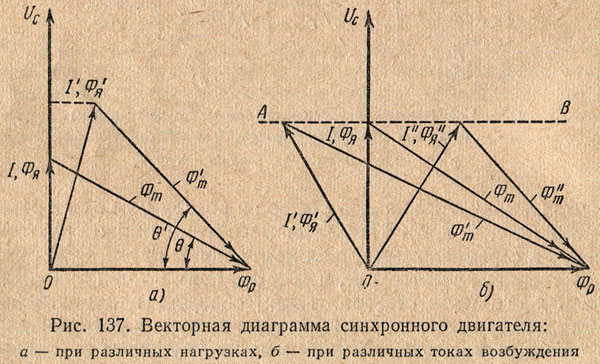
При некоторой нагрузке двигатель потребляет из сети ток I, который при определенном токе возбуждения может быть совпадающим с напряжением по фазе (активным). Ток в обмотке статора I возбуждает поток реакции якоря Ф„, который пропорционален току в статоре и совпадает с ннм по фазе. Поэтому в ином масштабе вектор тока статора I представляет собой вектор потока реакции якоря Φ я. Так как результирующее поле статора Φ p есть результат совместного действия поля полюсов Φ m и поля реакции якоря Φ я и, следовательно, может быть представлено геометрической суммой векторов Φ m и Φ я, то вектор, соединяющий концы векторов Φ я и Φ p, является вектором потока полюсов Φ m. Таким образом, при выбранной нагрузке между осями магнитных полей статора и ротора будет угол Θ.
Если увеличить нагрузку на валу двигателя, то угол между осями магнитных полей статора и ротора увеличится до значения Θ ′ и на векторной диаграмме вектор Φ ′ m, оставаясь неизменным по величине (так как неизменен ток возбуждения), повернется относительно неизменного вектора Φ p на угол Θ ′. При этом изменится ток в статоре I′ и поток реакции якоря Φ ′ я. Активная составляющая тока в статоре I′ увеличится по сравнению с начальным током статора I, т. е. повысится активная мощность, потребляемая двигателем из сети. Следовательно, увеличение нагрузки на валу двигателя вызывает повышение активной мощности, потребляемой им из сети, а при уменьшении нагрузки двигателя активная мощность понижается.
Изменение тока возбуждения синхронного двигателя приводит к изменению реактивной мощности, потребляемой им из сети. На векторной диаграмме, построенной для одной фазы обмотки статора (рис. 137, б), изображен вектор напряжения сети Uc и неизменный (при неизменном напряжении сети Uc) вектор результирующего магнитного поля статора (амплитуда магнитного потока) Φ p, повернутый относительно вектора Uc на 90° в сторону отставания (по часовой стрелке). Двигатель работает под нагрузкой и при определенном токе возбуждения (нормальное возбуждение) ток в обмотке статора Iсовпадает по фазе с напряжением сети Uc (ток чисто активный).
Вектор тока обмотки статора в ином масштабе представляет собой вектор потока реакции якоря Φ я, пропорциональный току в обмотке статора и совпадающий с ним по фазе. Вектор, соединяющий концы векторов Φ я и Φ p, является вектором магнитного потока полюсов Φ m. При изменении тока возбуждения синхронного двигателя потребляемая им из сети активная мощность остается неизменной, так как нагрузка на валу двигателя постоянна. Активная составляющая тока в обмотке статора будет также постоянной при изменении тока возбуждения. Поэтому конец вектора тока статора I и потока реакции якоря Φ я может лежать только на прямой АВ, параллельной горизонтальной оси. Следовательно, вектор потока полюсов Φ m будет всегда расположен так, что конец его совпадает с концом неизменного вектора потока результирующего поля статора Φ p, а начало — с концом вектора потока реакции якоря Φ я, т. е. на прямой АВ.
При повышении тока возбуждения (при перевозбуждении) увеличится и поток полюсов Φ ′ m, вектор которого расположен между прямой АВ и концом вектора Φ p. Векторы тока в обмотке статора I′ и потока реакции якоря Φ ′ m опережают по фазе напряжение сети Uc, т. е. двигатель потребляет из сети реактивный опережающий ток, являясь по отношению к сети конденсатором. Уменьшение тока возбуждения (недовозбуждение) уменьшает поток полюсов Φ ″ m и ток в обмотке статора I″ окажется отстающим по отношению к напряжению сети, т. е. для питающей сети двигатель будет индуктивной нагрузкой.
Основным достоинством синхронных двигателей является возможность их работы с потреблением опережающего, тока, т. е. двигатель может представлять собой емкостную нагрузку для сети. Такой двигатель повышает cos φ всего предприятия, компенсируя реактивную мощность, потребляемую другими приемниками энергии.
Синхронные двигатели производят преимущественно с явновыраженными полюсами и работают они в нормальном режиме с перевозбуждением при опережающем cos φ = 0, 8. Возбуждение синхронных двигателей осуществляется либо от возбудителей, либо от сети переменного тока через полупроводниковые выпрямители.
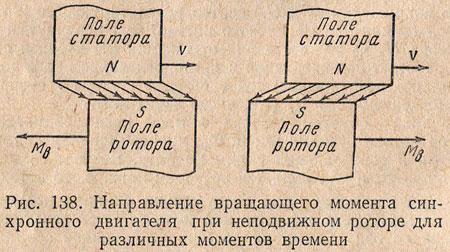
Пуск в ход синхронного двигателя непосредственным включением его в сеть невозможен, так как при включении обмотки статора в сеть создается вращающееся магнитное поле, а ротор в момент включения неподвижен и, следовательно, взаимодействия магнитных полей статора и ротора нет, т. е. двигатель не развивает вращающего момента. При неподвижном роторе вращающееся поле статора, взаимодействуя с полем ротора, будет развивать вращающий момент, непрерывно изменяющий направление. В некоторый момент времени (рис. 138) вращающий момент имеет одно направление. Спустя некоторый отрезок времени поле статора повернется относительно неподвижного ротора и направление вращающего момента изменится на обратное. Таким образом, результирующий вращающий момент за один оборот поля статора относительно неподвижного ротора равен нулю. Поэтому для пуска в ход двигателя необходимо предварительно увеличить число оборотов ротора его до синхронной скорости или близкой к ней.
В настоящее время исключительное применение получил так называемый асинхронный пуск синхронных двигателей, сущность которого заключается в следующем. В полюсных наконечниках ротора синхронного двигателя укладывается пусковая обмотка, выполненная в виде беличьего колеса подобно короткозамкнутой обмотке ротора асинхронной машины.
Обмотки статора двигателя включаются в трехфазную сеть и пуск его производится так же, как пуск асинхронных двигателей с короткозамкнутым ротором.
После того как двигатель разовьет скорость, близкую к синхронной (примерно 95%), обмотка возбуждения включается в сеть постоянного тока и двигатель входит в синхронизм, т. е. скорость ротора увеличивается до синхронной.
При пуске в ход двигателя обмотка возбуждения замыкается на сопротивление примерно в 10 — 12 раз больше, чем сопротивление самой обмотки. Нельзя обмотку возбуждения при пуске в ход оставить разомкнутой или замкнуть накоротко. Если при пуске в ход обмотка возбуждения окажется разомкнутой, то в ней будет индуктироваться очень большая э. д. с., опасная как для изоляции обмотки, так и для обслуживающего персонала. Создание э. д. с. большой величины объясняется тем, что при пуске в ход поле статора вращается с большой скоростью относительно неподвижного ротора и с такой же скоростью пересекает проводники обмотки возбуждения, имеющей много витков.
Если обмотку возбуждения замкнуть накоротко при пуске в ход двигателя под нагрузкой, то он может развить скорость, близкую к половине синхронной, и войти в синхронизм не сможет.
Возможность работы с потреблением из сети опережающего тока дает возможность использовать синхронную машину в качестве компенсатора. Как было отмечено выше, синхронный двигатель для сети может являться конденсатором и повышать cos φ всей энергоустановки, компенсируя реактивную мощность других приемников энергии. Повышение cos φ снижает потребление реактивной мощности электроустановок предприятия и уменьшает стоимость электроэнергии.
Таким образом, синхронным компенсатором служит синхронный двигатель, работающий без нагрузки и предназначенный для повышения cos φ предприятия. Следовательно, синхронный компенсатор является генератором реактивной мощности.
Конструктивно синхронный компенсатор отличается от синхронного двигателя незначительно. Компенсатор не несет механической нагрузки, поэтому его вал и ротор легче, а воздушный зазор меньше, чем у двигателя.
Основным недостатком синхронных двигателей является потребность в отдельном источнике постоянного тока для питания обмотки возбуждения.
Контрольные вопросы
1. Объясните принцип работы синхронного двигателя.
2. Что произойдет с синхронным двигателем, если при его работе изменить ток в обмотке возбуждения?
3. Как устроен и работает реактивный синхронный двигатель?
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|