- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Введение. Список литературы
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ

ФГБОУ ВО «Российский государственный геологоразведочный университет имени Серго Орджоникидзе» (МГРИ[MOU1] )
КАФЕДРА СОВРЕМЕННЫХ ТЕХНОЛОГИЙ БУРЕНИЯ СКВАЖИН
Реферат
Тема: Датчик оборотов ротора.
Выполнил: студент гр. РТБ-16
Иванов И. И.
Проверил: Щербакова К. О.
Москва 2020[MOU2]
Оглавление
Введение. 3
Датчик оборотов ротора. 4
Список литературы.. 6
Введение
Для лучшего раскрытия темы нам стоит начать с определения датчика. Что это такое?
Датчик преобразует физическую величину в электрический сигнал для ввода в устройство управления. Физической[MOU3] величиной может быть положение или перемещение объекта, усилие, расстояние до объекта, касание объекта, температура объекта и т. п. В отличие от датчиков для систем ручного управления к датчикам для автоматизированной системы предъявляются специальные требования по уровням погрешности, разрешающей способности, линейности, чувствительности, повторяемости, времени отклика [1[MOU4] ].
По способу получения информации датчики могут быть контактными и бесконтактными. У контактных датчиков движущийся элемент объекта автоматизации механически воздействует на чувствительный элемент датчика, поэтому они подвержены механическому износу и не способны работать при повышенной скорости перемещения объекта.
Выбор датчика зависит от материала объекта и других условий применения. Чаще всего применяют индуктивные датчики положения, выполненные в виде металлического цилиндра с чувствительным элементом на его торце. Внутри цилиндра размещены автогенератор, детектор, пороговый элемент и выходной усилитель-формирователь. Чувствительный элемент представляет собой катушку индуктивности.
Датчик оборотов ротора[MOU5]
Датчик оборотов ротора служит для определения частоты вращения ротора. Внутри датчика находятся две катушки индуктивности, одна из которых излучает электромагнитное поле, а вторая – воспринимает наведенную электродвижущую силу (ЭДС). При прохождении металла в непосредственной близости от индуктивного датчика (10-12 мм), изменяется значение магнитной индукции, пронизывающей вторую катушку, и на выходе датчика появляется логический «0», при удалении металла – логическая «1».
В дальнейшем аппаратура и программное обеспечение подсчитывает количество оборотов ротора за единицу времени. Внешний вид датчика оборотов ротора показан на рисунке 1.
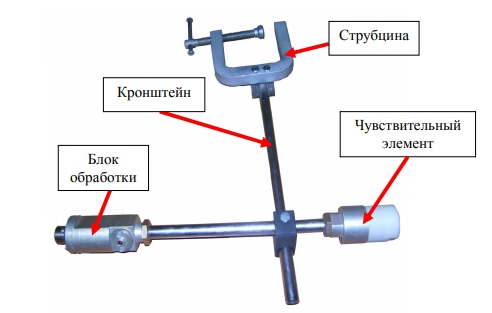
Рис. 1. Датчик оборотов ротора[MOU6]
Датчик монтируется при помощи кронштейна и струбцины, что позволяет регулировать его положение относительно движущегося металлического объекта. При его установке необходимо нацелить чувствительный элемент на привод ротора или другую деталь, по частоте вращения которой можно рассчитать обороты ротора. Поскольку радиус действия датчика достаточно мал, то для его правильной работы можно установить специальный металлический «флажок», при прохождении которого рядом с чувствительным элементом датчика будет засчитываться один оборот вращающейся детали. На рисунке 2 показан вариант монтажа датчика оборотов ротора.
Пример оформления формул:
| (1); |


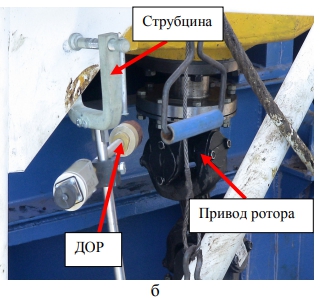
Рис. 2. Пример монтажа датчика оборотов ротора (а – общий вид места установки, б – крупный план установки датчика)
Список литературы
1. http: //bngs. samgtu. ru/sites/bngs. samgtu. ru/files/laba2. pdf.
2. https: //studref. com/387931/tehnika/datchiki[MOU8].
3. Учебное пособие по дисциплине «Буровые промывочные и тампонажные растворы» / МГРИ-РГГРУ; сост. Соловьев Н. В. – Москва: МГРИ-РГГРУ, 2013. – 50 с.
4. 2. Гидравлический канал связи [Электронный ресурс] // Большая Энциклопедия Нефти и Газа. – Режим доступа: https: //www. ngpedia. ru/id75058p1. html.
5. 3. Троичные системы счисления [Электронный ресурс] // Википедия. – Режим доступа: https: //ru. wikipedia. org/wiki/ Троичная_система_счисления.
6. 4. Акустический канал связи [Электронный ресурс] // Студми. Учебные материалы для студентов. – Режим доступа: https: //studme. org/250778/tehnika/akusticheskiy_kanal_svyazi.
7. Научный руководитель: Соловьев Н. В., д. т. н., профессор, заведующий кафедрой современных технологий бурения скважин.
[MOU1]Обратите внимание, что уже давно “МГРИ”. Не используем “МГРИ-РГГРУ”
[MOU2]Год 2020
[MOU3]Шрифт 14 или 12 Times New Roman;
Выравнивание по ширине;
Нумерация страниц;
Межстрочный пробел 1, 5
Отступ с красной строки;
Границы полей
[MOU4]Оформление ссылки на литературный источник откуда было заимствование.
Количество ссылок должно соответствовать количеству цифр в тексте на источник
[MOU5]Главы
[MOU6]Рисунок или картинку вставляем посередине;
Название рисунка подписываем под рисунком “Рисунок 1 или Рис. 1”;
[MOU7]Формулу оформляем посередине путем вставки формулы;
Нумерация формулы – справа в скобках;
[MOU8]Пример оформления. Список литературы возможно оформить с использованием ссылок как на книги, статьи, журналы, интернет ссылки.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|