- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Следящая система рулевого электропривода с потенциометрическим управлением
Принцип построения систем рулевого электропривода следящего действия заключается в том, что угол перекладки пера руля задаётся постом управления, а электродвигатель рулевого устройства, отработав заданный угол перекладки, автоматически останавливается. Происходит как бы «слежение» электродвигателя рулевого устройства за положением задающего устройства поста управления.
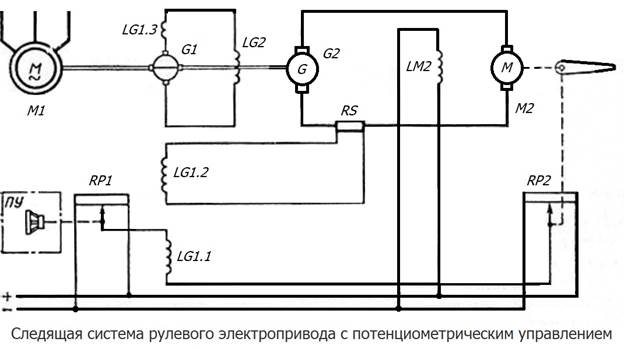
На рис. представлена схема рулевого электропривода следящего действия с потенцнометрическим управлением. Схема состоит из приводного двигателя M1, электромашинного усилителя G1, генератора G2 и исполнительного двигателя М2. Двигатель M1 приводит во вращение генератор и ЭМУ, который используется в качестве возбудителя генератора G2. Рулевой электропривод выполнен по системе Г—Д, а ЭМУ имеет две обмотки управления LG1. 1, LG1. 2 и компенсационную LG1. 3.
Обмотка возбуждения двигателя LM2 и первая обмотка управления LG1. 1 электромашинного усилителя получают питание от независимого источника постоянного тока. Задающее устройство — потенциометрический датчик RP1 механически связан с рукояткой поста дистанционного управления (ПУ), а потенциометр-приемник RP2 имеет механическую связь с баллером руля. Обмотка управления LG1. 1 включена в диагональ моста, образованного этими потенциометрами. Вторая обмотка управления LG1. 2 включена в силовую цепь через шунт RS. Она выполняет функцию обратной связи по току нагрузки.
При одинаковом положении ползунков обоих потенциометров потенциалы их контактных щеток равны и по обмотке управления LG1. 1 ток не проходит (Iy1 = 0). При переводе рукоятки ПУ в другое положение произойдет и перемещение ползунка потенциометра RP1. Потенциал его контактной щетки изменится в большую или меньшую сторону в зависимости от направления перемещения рукоятки ПУ. В обмотке управления LG1. 1 потечет ток. На зажимах ЭМУ появится напряжение, а по обмотке возбуждения генератора LG2 пойдет ток. В результате на зажимах генератора G2 и двигателя М2 появится напряжение. Исполнительный двигатель начнет вращаться, перекладывая руль в заданном направлении.
Одновременно с поворотом баллера руля перемещается и ползунок потенциометра RP2, приближая потенциал своей контактной щетки к потенциалу контактной щетки потенциометра RP1. Когда потенциалы контактных щеток потенциометров RP1 и RP2 уравняются, прекратится ток в обмотке управления LG1. 1. В результате двигатель М2 остановится, выполнив перекладку руля на заданный угол.
Для обеспечения стоянки двигателя под током и предотвращения больших перегрузок обмотка управления LG1. 2 включена встречно с задающей обмоткой управления LG1. 1. Такое включение обмоток управления ЭМУ позволяет ограничить ток в силовой цепи до допустимых значений.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|