- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Составление векторных уравнений скоростей
Составление векторных уравнений скоростей
Одной из задач кинематического анализа механизма является нахождение линейных скоростей точек и угловых скоростей звеньев механизма. Эта задача может быть выполнена с помощью построения планов скоростей для каждого положения механизма. Планы скоростей относятся к графоаналитическому методу кинематического анализа
! План скоростей – это графическое решение векторных уравнений скоростей для точек механизма.
Планом скоростей называют чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек механизма в данном положении.
Для построения плана скоростей необходимы исходные данные:
план механизма с указанием размеров;
угловая скорость начального звена.
План скоростей строится в масштабе. Масштабный коэффициент плана скоростей μ v находится поформуле:
 (1)
(1)
Общая теорема из курса теоретической механики (для сложного движения).
Любое движение плоской фигуры (звена) можно разложить на два:
· переносное (поступательное) движение звена вместе с произвольно выбранной точкой (полюсом);
· относительное (вращательное) движение вокруг полюса.
! За полюс следует выбирать точку скорость, которой известна.
Поэтому векторное уравнение для любой точки механизма может быть составлено по следующей формуле:
 (2)
(2)
где  - неизвестная скорость любой точки звена;
- неизвестная скорость любой точки звена;
 - скорость точки звена, которая уже известна;
- скорость точки звена, которая уже известна;
 - относительная скорость вращения точки вокруг полюса;
- относительная скорость вращения точки вокруг полюса;
Например, рассмотрим движение звена АВ скорость точки А у которого известна, а скорость точки В необходимо найти.
Составляем векторное уравнение скорости точки В:
 ;
;
где:  - известная скорость точки А,
- известная скорость точки А,
 - относительная скорость вращения (∙ )А вокруг точки В.
- относительная скорость вращения (∙ )А вокруг точки В.
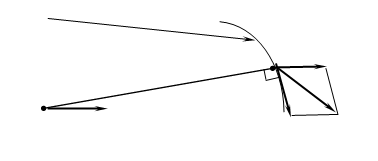
траектория относительного вращения точки В вокруг точки А
А В


рис. 1 – Направление векторов скоростей.
Вид составляемого векторного уравнения скорости для точки будет зависеть от вида движения звена, которому данная точка принадлежит (поступательное, вращательное, плоскопараллельное). Рассмотрим составление векторных уравнений скоростей точек при различных видах движения звеньев.
· поступательное движение звена (рис. 2).
 В данном случае известна скорость стойки ползуна
В данном случае известна скорость стойки ползуна
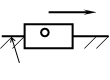 известна скорость стойки ползуна - она равна
известна скорость стойки ползуна - она равна
В нулю:
 = 0
= 0
стойка ползуна
рис. 2
Уравнение скорости точки В будет иметь вид:
 (3)
(3)
где:  - скорость стойки ползуна, которая равна 0 т. е.
- скорость стойки ползуна, которая равна 0 т. е.
 ,
,
 - скорость движения ползуна по стойке, которая направлена параллельно стойке.
- скорость движения ползуна по стойке, которая направлена параллельно стойке.
- скорость движения точки В по стойке параллельна стойке (в приведённом примере горизонталь).
· Вращательное движение звена ОА (рис. 3).
При вращательном движении звена известнаскорость оси вращения точки О она равна нулю( ):
):
 А
А
ω 1 
О
рис. 3 – Группа Ассура 1 класса 1 вида.
Уравнение скорости точки А будет иметь вид:
 (4)
(4)
где  - скорость вращения точки А вокруг точки О, которая
- скорость вращения точки А вокруг точки О, которая  ОА.
ОА.
· Плоскопараллельное движение звена (рис. 4).
При плоскопараллельном движении
B звенаАВ известна скорость точки А.
Уравнение скорости точки В имеет вид:
A 
 (5)
(5)
рис. 4
- это относительная скорость вращения точки В вокруг точки А, она направлена перпендикулярно звену АВ

|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|