- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Мдк 01.01 Тема 4.2: Силы, действующие на автомобиль при его движении. Занятие 4.2.2: Уравнение движения автомобиля. Сила тяги по условиям сцепления шин с дорогой. Условие возможности движения автомобиля. Радиальны
Мдк 01. 01 Тема 4. 2: Силы, действующие на автомобиль при его движении. Занятие 4. 2. 2: Уравнение движения автомобиля. Сила тяги по условиям сцепления шин с дорогой. Условие возможности движения автомобиля. Радиальные реакции на колесах неподвижного автомобиля. Продольное распределение нагрузки при движении. Сила сцепления колес с дорогой. Условия буксования колес. Лекция Уравнение движения автомобиля Сила тяги автомобиля (Рр), полученная с помощью двигателя, расходуется на преодоление сопротивлений движению и придание автомобилю ускорения. Учитывая это, составим из условия равенства внешних и внутренних сил, действующих на автомобиль, уравнение движения автомобиля: Рр = Рf ± Pi + Pw ± Pj, (3. 17) где Pf, Pi, Pw, Pj – описанные ранее виды сопротивлений движению автомобиля. Сформируем в левой части члены уравнения, зависящие в основном от скорости движения и характеризующие динамические качества автомобиля. В правой части оставим составляющие, описывающие дорожные условия (дорожные сопротивления). Подставив значения сопротивлений, определенные ранее (п. 3. 3), получим уравнение:
Рр =  . (3. 18)
. (3. 18)
Академик Е. А. Чудаков предложил характеризовать тяговые (динамические) возможности автомобиля динамическим фактором – разницей между силой тяги на ведущих колесах и сопротивлением воздушной среды, отнесенной к единице веса автомобиля. После преобразования формулы (3. 18) получим зависимость:
 . (3. 19)
. (3. 19)
Из которой следует, что динамический фактор – это избыточная удельная сила тяги, которая может быть использована на преодоление дорожных сопротивлений (  ) и придание автомобилю ускорения (j).
) и придание автомобилю ускорения (j).
Сила тяги и сопротивление воздушной среды в процессе движения автомобиля не остаются постоянными, а изменяются с изменением скорости. Поэтому величина динамического фактора также изменяется в зависимости от скорости. График зависимости динамического фактора от скорости при полной нагрузке на автомобиль, по предложению академика Е. А. Чудакова, назвали динамической характеристикой (рис. 3. 6).
Такие графики используются в России как основные при всех тяговых расчетах на автомобильных дорогах (определение максимальных продольных уклонов, преодолеваемых автомобилями; величины скорости, развиваемой автомобилями на подъемах и т. д. ).
Возможность приложения максимальных тяговых усилий, которые характеризуют динамические характеристики, зависит от сцепления колеса автомобиля с покрытием, поэтому для проверки реализации тяговых возможностей автомобиля строят графики динамических характеристик по сцеплению (Dсц). Их определяют, исходя из того, что
Рр = Gсц·j, (3. 20)
тогда
 . (3. 21)
. (3. 21)
Совмещая графики динамических характеристик и графики динамических характеристик по сцеплению, определяют возможную скорость движения автомобиля в зависимости от сцепных качеств покрытия.
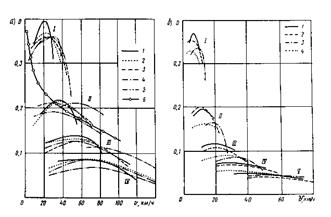 Рис. 3. 6. Примеры графиков динамических характеристик автомобилей:
Рис. 3. 6. Примеры графиков динамических характеристик автомобилей:
а-легковых автомобилей различных марок (1, 2, 3, 4, 5, 6); б -грузовых автомобилей различных марок (1, 2, 3, 4)
Величина тяговой силы Рк на ведущих колесах автомобиля, необходимая для его движения, ограничивается сцеплением шин с поверхностью дороги.
Сцепление шины с дорогой оценивается коэффициентом сцепления φ, который равен отношению наибольшей величины реакции Хк (см. рис. 2) к величине реакции ZK:

Под силой сцепления Pφ понимают силу, противодействующую скольжению колес относительно дороги. Она равна силе трения, возникающей в месте контакта шины с дорогой. Величина силы сцепления зависит от нормального давления ведущих колес на дорогу и коэффициента сцепления φ:

где
φ — коэффициент сцепления шин ведущих колес автомобиля с дорогой;
2Zk2 — радиальная реакция ведущих колес.
Для обеспечения движения автомобиля необходимо, чтобы тяговая сила Рк на ведущих колесах была меньше силы сцепления колес с дорогой, или в крайнем случае равна ей, в противном случае колеса автомобиля будут буксовать:

В зависимости от направления скольжения колес различают коэффициенты продольного (φ ж) и поперечного (φ у) сцепления. Для упрощения расчетов обычно принимают коэффициент поперечного сцепления φ у равным φ x и обозначают его φ.
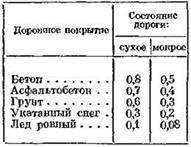
Коэффициент сцепления зависит от типа и состояния дорожного покрытия, рисунка протектора и степени изношенности шины, давления воздуха в шине, скорости движения автомобиля, вертикальной нагрузки на колесо.
Численное значение коэффициента сцепления φ значительно уменьшается при движении автомобиля по мокрому асфальтобетонному или обледенелому покрытию, особенно с увеличением скорости движения автомобиля.
Чаще всего колеса буксуют при резком трогании автомобиля и при движении по скользкой дороге.
На твердых сухих дорожных покрытиях с увеличением давления воздуха в шине, вертикальной нагрузки и скорости движения величина коэффициента сцепления снижается.
Некоторые значения коэффициентов сцепления приведены в табл. 2.
Таблица 2
Значения коэффициента сцепления
Руководитель занятия: ________________________ Катречко С. И.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|