- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Водопьянов М. М. (ИИТ-473). Научный руководитель Шилин А. Н.. РАЗРАБОТКА ПРИБОРА С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ ДЛЯ КОНТРОЛЯ НИЗКОЧАСТОТНЫХ КОЛЕБАНИЙ ОБЬЕКТОВ
Водопьянов М. М. (ИИТ-473)
Научный руководитель Шилин А. Н.
РАЗРАБОТКА ПРИБОРА С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ ДЛЯ КОНТРОЛЯ НИЗКОЧАСТОТНЫХ КОЛЕБАНИЙ ОБЬЕКТОВ
Аннотация. Шагающие робототехнические платформы, передвигающиеся по дну, находят применение при внедрении новых промышленных технологий освоения ресурсов морского дна.
Целью проекта является разработка прибора для измерения низкочастотных колебаний различных объектов, а также отслеживание динамики изменения амплитуды и частоты колебаний этих объектов. Сферы применения данной разработки очень широки...
Таблица 1. Название таблицы
| Название | Критерий 1 | Критерий 2 |
Формула (MathType):
 (1)
(1)
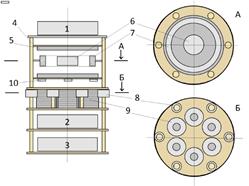
Рис. 1 – Схема устройства
Литература:
1. Чернышев В. В. Управление движением подводных шагающих аппаратов передвигающихся по дну / В. В. Чернышев, В. В. Арыканцев, А. Е. Гаврилов // Известия ЮФУ. Технические науки, 2016, № 1, C. 141-155.
СВЕДЕНИЯ ОБ АВТОРАХ
| 1. ФИО | Иванов Иван Иванович, ст. гр. УТС-420 Карпов Кирилл Константинович, ст. гр. АТП-421 |
| 2. Название работы | РАЗРАБОТКА И АНАЛИЗ МАТЕМАТИЧЕСКОЙ МОДЕЛИ МАГНИТОГИДРОДИНАМИЧЕСКОГО НАСОСА |
| 3. Научный руководитель | Дроботов Алексей Владимирович, доцент каф. АПП |
| 4. Направление конференции | №2. Прогрессивные технологии в машиностроении, устройства и средства автоматизации. |
| 5. Контактный телефон | 8(ХХХ)-ХХХ-ХХ-ХХ (Иванов И. И. ) 8(ХХХ)-ХХХ-ХХ-ХХ (Карпов К. К. ) |
| 6. Адрес электронной почты (E-mail) | ivanov@mail. ru (Иванов И. И. ) karpov@mail. ru (Карпов К. К. ) |
| 7. Финансовая основа обучения | Бюджет или контракт |
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|