- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
ВЕЧНЫЙ МАГНИТО-ГРАВИТАЦИОННЫЙ МОТОР
ВЕЧНЫЙ МАГНИТО-ГРАВИТАЦИОННЫЙ МОТОР
Канарёв Ф.М.
kanarevfm@mail.ru
Анонс. Физико-механический анализ процесса работы вечного магнито-гравитационного мотора показывает, что он базируется на элементарном взаимодействии магнитных и гравитационных сил, которое надлежит изучать в школе.
Заявка на патентование вечного магнито-гравитационного мотора была подана впервые в 1823г, то есть около 200 лет назад (рис. 1), а описание устройства опубликовали в 1927г. (рис. 2).

Рис. 1. Заявка на патентование магнито-гравитационного мотора была подана в 1823г
Рис. 2. Авторы магнито-гравитационного мотора
опубликовавшие информацию о нём в 1927г
На фото (рис. 3) представлена действующая модель магнито-гравитационного мотора [1]. Физику процесса его работы ещё никому не удалось описать. Попытаемся сделать это, руководствуясь новыми законами механодинамики и электродинамики [1].
 а)
а)
|  b)
b)
|
Рис. 3: а) – фото магнито-гравитационного мотора;
b) –магнито-гравитационный мотор вращается под действием магнита и силы гравитации
Итак, физика процесса работы магнито-гравитационного мотора остаётся не выявленной с 1823 года в условиях её простоты. Колесо магнито-гравитационного мотора вращается за счёт взаимодействия магнита с вращающимся шариком, который вращает колесо мотора. Из этого следует, что секрет вращения шарика, а значит и колеса, скрыт в направлении магнитных силовых линий, которые формируются магнитным полем между постоянным магнитом и наведённым магнитным полем в шарике [2].
Мы уже давно показали, что все электромоторы и электрогенераторы работают благодаря формированию магнитных силовых линий между магнитными полюсами роторов и статоров [2]. Представим ещё раз этот момент новой электродинамики. На рис. 4 показано направление магнитных силовых линий между одноимёнными и разноимёнными магнитными полюсами постоянных магнитов [2].
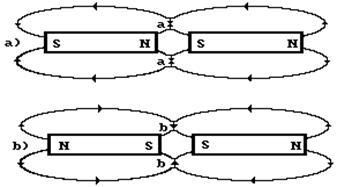
Рис. 4. Схема взаимодействия магнитных силовых
линий стержневых магнитов
Как видно (рис. 4, а), у разноименных магнитных полюсов, сближающих друг друга, магнитные силовые линии в зоне контакта полюсов (рис. 4, а, точки а) направлены навстречу друг другу  , а у одноименных магнитных полюсов, отталкивающих друг друга (рис. 4, b, точки b), направления магнитных силовых линий в зоне контакта полюсов совпадают
, а у одноименных магнитных полюсов, отталкивающих друг друга (рис. 4, b, точки b), направления магнитных силовых линий в зоне контакта полюсов совпадают  [2].
[2].
Известно, что если постоянный магнит взаимодействует с деталью из железа, то внутри этой детали формируется магнитное поле с магнитной полярностью противоположной магнитной полярности постоянного магнита и железная деталь сближается с постоянным магнитом благодаря тому, что магнитные силовые линии в каждой точке магнитного поля между магнитом и железной деталью направлены на встречу друг другу (рис. 4, а). Именно в этом заключается физическая суть работы магнито-гравитационного мотора (рис. 3). Чтобы убедиться в этом представим схему взаимодействия магнитных полей постоянного магнита и шарика магнито-гравитационного мотора (рис. 5) [1]. При этом обратим внимание на то, что шарик взаимодействует с южным магнитным полюсом (конец магнита красного цвета) постоянного магнита (рис. 3, 5).
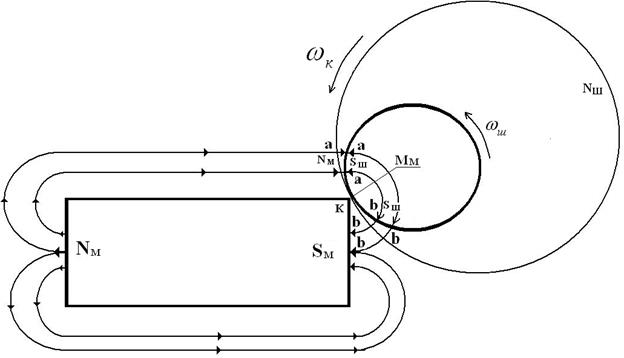
Рис. 5. Схема взаимодействия магнитных полей полюсов контакта
шарика и постоянного магнита
Итак, авторы магнито-гравитационного мотора (рис. 3, 5) сконструировали его так, что шарик, находящийся на внутренней поверхности обода вращающегося колеса, взаимодействует с острым углом южного (S) полюса магнита. В видео он окрашен в красный цвет [1]. Давно условились, считать, что магнитные силовые линии выходят из северного магнитного полюса постоянного магнита  и входят в его южный магнитный полюс
и входят в его южный магнитный полюс  (рис. 5).
(рис. 5).
При сближении магнита с намагничеваемой деталью, у неё, в зоне сближения, формируется магнитный полюс противоположной полярности. В нашем примере в тело шарика входят магнитные силовые линии северного магнитного полюса постоянного магнита (рис. 5). В результате в зоне их входа в тело шарика в нём автоматически формируется магнитный полюс противоположной полярности, то есть, южный магнитный полюс  , а с противоположной стороны шарика – северный магнитный полюс
, а с противоположной стороны шарика – северный магнитный полюс  (рис. 5).
(рис. 5).
Как видно (рис. 5), магнитные силовые линии северного полюса постоянного магнита и южного полюса шарика направлены навстречу друг другу, как и в зоне (а….а) разноимённых магнитных полюсов постоянных магнитов (рис. 4, а). Так как разноимённые магнитные полюса постоянных магнитов сближаются в этом случае, то аналогично направленные магнитные силовые линии постоянного магнита и шарика в зонах (а…а) (рис. 5) сформируют магнитный момент, который будет поворачивать шарик относительно точки  - точки с наименьшим зазором между постоянным магнитом и шариком, против часовой стрелки (рис. 5). В зоне (b…b) шарика направления магнитных силовых линий, выходящих из его тела будут совпадать с направлением силовых линий постоянного магнита, входящих в его южный магнитный полюс . В результате в этой зоне взаимодействия магнитных полей шарика и постоянного магнита согласно рис. 4, b (зона b…b) сформируются силы, которые будут отталкивать тело шарика от тела постоянного магнита и таким образом – увеличивать суммарный магнитный момент
- точки с наименьшим зазором между постоянным магнитом и шариком, против часовой стрелки (рис. 5). В зоне (b…b) шарика направления магнитных силовых линий, выходящих из его тела будут совпадать с направлением силовых линий постоянного магнита, входящих в его южный магнитный полюс . В результате в этой зоне взаимодействия магнитных полей шарика и постоянного магнита согласно рис. 4, b (зона b…b) сформируются силы, которые будут отталкивать тело шарика от тела постоянного магнита и таким образом – увеличивать суммарный магнитный момент  , вращающий шарик, относительно точки (рис. 5). Так как момент сил взаимодействия шарика с внутренней поверхностью обода колеса (рис. 3 и 5) будет больше момента сил гравитации, вращающих шарик в обратном направлении, то шарик будет вращаться и вращать колесо магнито-гравитационного мотора, против хода часовой стрелки [1]. Составим уравнение сил и моментов, описывающих процесс работы магнито-гравитационного мотора (рис. 6).
, вращающий шарик, относительно точки (рис. 5). Так как момент сил взаимодействия шарика с внутренней поверхностью обода колеса (рис. 3 и 5) будет больше момента сил гравитации, вращающих шарик в обратном направлении, то шарик будет вращаться и вращать колесо магнито-гравитационного мотора, против хода часовой стрелки [1]. Составим уравнение сил и моментов, описывающих процесс работы магнито-гравитационного мотора (рис. 6).
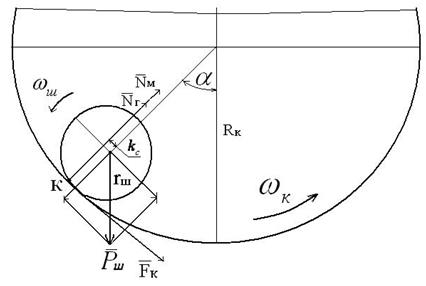
Рис. 6. Схема к расчёты силы сопротивления качению шарика,
формируемой силой гравитации
На рис. 6 к шарику приложены следующие силы: сила гравитации  ; нормальная составляющая реакции поверхности колеса
; нормальная составляющая реакции поверхности колеса  , генерируемая силой гравитации ; нормальная составляющая реакции поверхности колеса
, генерируемая силой гравитации ; нормальная составляющая реакции поверхности колеса  , генерируемая магнитной силой, прижимающей шарик к внутренней поверхности колеса; касательная сила сопротивления качению шарика по внутренней поверхности колеса
, генерируемая магнитной силой, прижимающей шарик к внутренней поверхности колеса; касательная сила сопротивления качению шарика по внутренней поверхности колеса  .
.
Давно условились представлять коэффициент сопротивления качению колёс в виде плеча  (рис. 6) сдвига нормальной реакции от оси колеса в сторону его вращения и назвали это плечо коэффициентом сопротивления качению. Для стального шарика, катящегося по стали, он близок к величине
(рис. 6) сдвига нормальной реакции от оси колеса в сторону его вращения и назвали это плечо коэффициентом сопротивления качению. Для стального шарика, катящегося по стали, он близок к величине  . Обозначая радиус шарика символом
. Обозначая радиус шарика символом  , имеем сумму моментов сил, действующих на шарик при его качении по внутренней поверхности колеса (рис. 6).
, имеем сумму моментов сил, действующих на шарик при его качении по внутренней поверхности колеса (рис. 6).
 . (1)
. (1)
Из этого уравнения можно определить нормальную составляющую , действующую на шарик, которая формируется магнитными силами, прижимающими шарик к внутренней поверхности колеса (рис. 6).
 . (2)
. (2)
Если допустить, что при установившемся режиме работы магнито-гравитационного мотора его колесо и шарик вращаются равномерно, то можно вычислить кинетические энергии вращения колеса и шарика. Момент инерции  вращающегося колеса определяется экспериментально, а момент инерции шарика равен
вращающегося колеса определяется экспериментально, а момент инерции шарика равен  . Обозначая в установившемся режиме угловые скорости колеса
. Обозначая в установившемся режиме угловые скорости колеса  и шарика
и шарика  , имеем математическую модель для расчёта суммарной кинетической энергии
, имеем математическую модель для расчёта суммарной кинетической энергии  вращающегося колеса
вращающегося колеса  и шарика
и шарика  .
.
 . (3)
. (3)
Вполне естественно, что есть основания полагать, что при равномерном вращении колеса и шарика их кинетические энергии, примерно, равны. Тогда появляется возможность определить момент инерции колеса.
 . (4)
. (4)
Начальные исходные уравнения позволяют перейти к более глубокому описанию процесса работы магнито-гравитационного мотора и к созданию коммерческих моделей.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|