- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Связи и реакции связей
| | ||||||||
Связи и реакции связей
Отметим, что все положения и полученные ранее зависимости справедливы для свободного твердого тела.Однако в большинстве инженерных задач встречаемся с несвободным телом, т. е. телом, перемещениям которого в пространстве препятствуют какие-нибудь другие тела.
Тела, которые ограничивают перемещения данного тела в пространстве, являются по отношению к нему связями. Например, для книги, лежащей на столе, связью будет плоскость стола, не дающая книге перемещаться по вертикали вниз; для стола связью будет поверхность пола; для двери связью являются петли, на которых она подвешена, и т. д.
Эффект действия связи на данное тело выражается некоторыми силами, действующими на тело со стороны связи. Эти силы называются реакциями связи.
Числовые значения реакций связей, как правило, неизвестны, и они определяются решением соответствующей задачи механики. Направление же реакции связей обусловливается конструктивными особенностями места сопряжения (контакта) рассматриваемого тела и тела, осуществляющего связь. Реакция связи направлена противоположно тем перемещениям рассматриваемого тела, которым данная связь не позволяет осуществиться.
Основные типы связей и их реакции представлены в табл. 2.1. В левом столбце показано рассматриваемое тело и наложенные на него связи, в правом — рассматриваемое тело, освобожденное от связей, и действующие на него реакции связей; действующие на тело активные силы не показаны.
Гладкая поверхность(см. табл. 2.1). Гладкой будем называть поверхность, трением о которую можно пренебречь. Реакция N приложена в точке контакта тела с поверхностью опоры, направлена к телу по общей нормали к поверхностям соприкасающихся тел. Когда одна из соприкасающихся поверхностей является точкой (так будет, например, у опоры в виде уступа), то реакция направлена по нормали к другой поверхности.
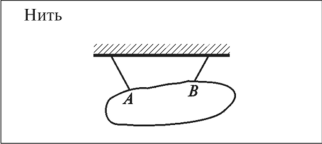
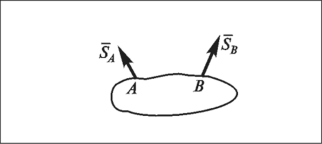
Нить.Термином «нить» обозначают тросы, канаты, цепи, которые считаются гибкими, нерастяжимыми и могут воспринимать только растягивающие их силы. Реакция нити направлена вдоль нее от тела («внутрь» нити).
Шарниром называют такое соединение тел, которое позволяет им взаимно поворачиваться. Если рассматриваемое тело шарниром соединяется с неподвижным основанием, то эту связь называют неподвижной шарнирной опорой.
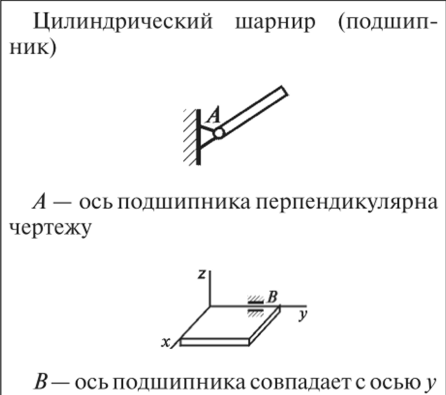
Цилиндрический шарнир (подшипник) допускает взаимное вращение тел вокруг своей оси и скольжение вдоль нее. По своей конструкции цилиндрический шарнир представляет собой опирание цилиндрического элемента одного тела (на рис. 2.2, а его сечение заштриховано, ось цилиндра перпендикулярна плоскости чертежа) на внутреннюю поверхность цилиндрического отверстия другого тела. Соприкосновение этих тел происходит по какой-либо образующей цилиндрической поверхности, которая в сечении (рис.
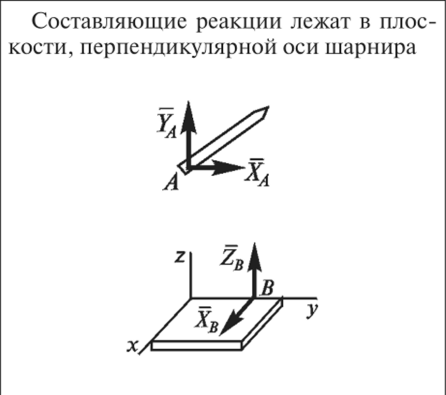
2.2, б), перпендикулярном оси цилиндра, проецируется в «точку контакта» К. Реакция связи (на рис. 2.2, а левое тело считаем связью для правого) проходит через ось шарнира и располагается в плоскости, перпендикулярной этой оси. Так как в зависимости от действующих сил «точка контакта» цилиндрических поверхностей тел будет меняться, то для реакции N в этом случае не известны ни ее модуль (7V), ни ее направление (угол ср) (рис. 2.2, в). При решении задач вместо двух неизвестных N, ср реакцию цилиндрического шарнира удобно представить в виде двух составляющих ХА, YА (рис. 2.2, г).
Таблица 2.1. Реакции связей
| Название связей и их обозначение на схемах | Реакции связей |

| 
|
| 
|
| Название связей и их обозначение на схемах | Реакции связей |
| 
|
| 
|
| 
|
| 
|
| 
|
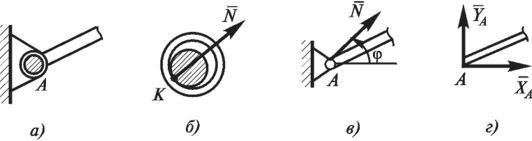
Рис. 2.2
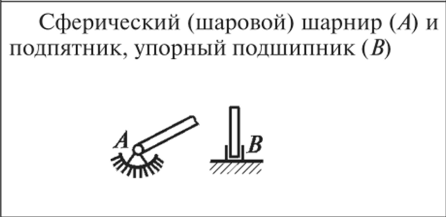
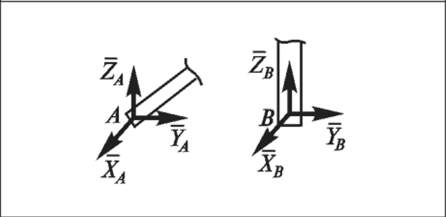
Сферический (шаровой) шарнирпозволяет соединяемым телам совершать пространственные взаимные вращения вокруг своего центра. Реакция такого шарнира проходит через его центр и может иметь любое направление в пространстве. При решении задач реакцию сферического шарнира представляют в виде трех составляющих, направленных вдоль координатных осей. Аналогичным способом направляются и реакции подпятника (упорного подшипника).
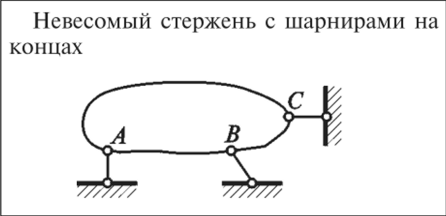
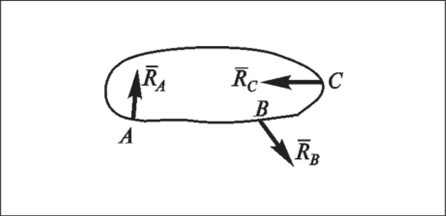
Невесомый стержень с шарнирами на концах.Если стержень прямолинейный, то его реакция направлена вдоль оси (если криволинейный, то вдоль прямой, соединяющей концевые шарниры стержня). В отличие от нити стержень воспринимает как растягивающие, так и сжимающие его силы.
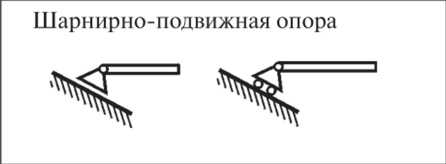
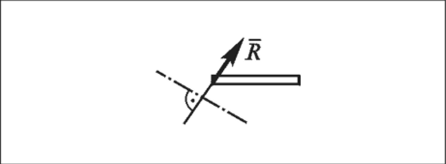
Шарнирно-подвижная опорапредставляет собой сочетание цилиндрического шарнира и гладкой поверхности, вдоль которой опора может либо скользить, либо перемещаться на катках. Это обстоятельство и обусловливает направление реакции R — к телу, перпендикулярно неподвижной опорной плоскости.
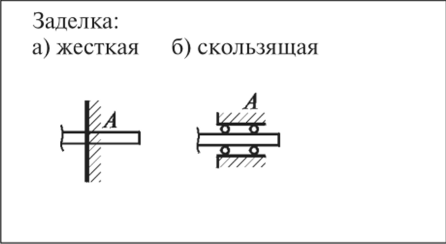
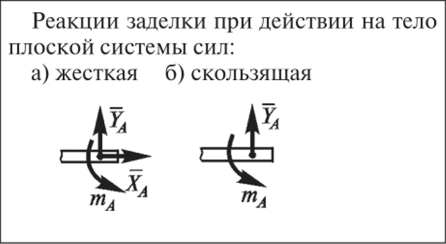
Заделка.Жесткая заделка представляет собой такое внедрение данного тела в другое, при котором нет взаимных перемещений (например, гвоздь вбит в стену, балконная плита заделана в стену, столб врыт в землю, соединение металлических тел с помощью сварки). Реакция заделки представляет собой силы, распределенные по поверхности контакта тел. Если на рассматриваемое тело действует плоская система сил (рис. 2.3, а), то реакцию жесткой заделки представляют в виде двух составляющих XА, YA и пары сил с моментом тА (рис. 2.3, б), действующих в шюскости нагрузки. Реакция скользящей заделки состоит из силы YA и пары сил с моментом тА.
Если на тело действует произвольная пространственная система сил, то реакцию жесткой заделки (силу R и пару_ сил с моментом М) представляют_в виде трех составляющих сил X, Y, Z и трех составляющих пар Мх, Му, Mz (см. задачу 2.7 в § 2.3).

Рис. 2.3
Следует обратить внимание, что при решении задач направления реакций связей (или их составляющих) на чертеже следует изображать в соответствии с конструкцией связи (см. табл. 2.1) независимо от направлений и величин действующих активных сил. Числовые значения реакций будут определяться последующим расчетом; если алгебраическое значение реакции получено со знаком минус, то, значит, соответствующая реакция имеет направление, противоположное первоначально принятому.
При решении задач механики несвободных механических систем используют аксиому связей (принцип освобождаемости), согласно которой любую несвободную механическую систему можно рассматривать как свободную, если ее мысленно освободить от связей и приложить к ней реакции связей.
Условием эквивалентности этих двух систем является выполнение для свободной механической системы уравнений равновесия. Реакции связей будут участвовать в уравнениях равновесия наряду с другими силами, действующими на рассматриваемую механическую систему. Таким образом, применением аксиомы связей задача о несвободном теле сводится к задаче о свободном теле.
Покажем, как реализуется аксиома связей при рассмотрении равновесия, например, балки ЛВ (рис. 2.4, а), закрепленной в точке А цилиндрическим шарниром и опирающейся в точке В на гладкую поверхность. К балке приложены активные сила F и пара сил с моментом М. В соответствии с аксиомой связей (принципом освобо-
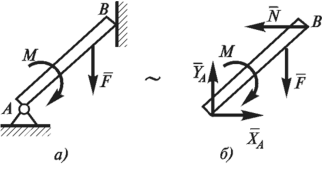
Рис. 2.4
ждаемости) мысленно отбросим от балки Л В связи и будем ее рассматривать как свободное тело (рис. 2.4, б), на которое кроме заданной нагрузки (силы^Г и пары сил с моментом М) действуют реакции связей X А, YА и N.
Следует иметь в виду, что при решении задач изображение тела без связей (как это сделано на рис. 2.4, б) не является строго обязательным; иногда воздействие реакций связей на тело показывают на исходном чертеже конструкции, подразумевая, что это тело «свободное».