- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Основные понятия статики
Основные понятия статики
1. Абсолютно твердое тело (АТТ). Тело, в котором расстояние между двумя любыми точками всегда остается постоянным, называется абсолютно твердым. В природе, безусловно, таких тел нет, поскольку при определенных взаимодействиях тела изменяют свою форму. Однако, например, при определении реакций связей данная гипотеза не вносит существенной погрешности.
2. Материальная точка. Тело, размеры которого по всем направлениям весьма малы, так что различием в движении отдельных точек этого тела можно пренебречь, называется материальной точкой.
3. Система отсчета. Система координат, неизменно связанная с каким либо физическим телом, относительно которого определяется положение данного движущегося объекта называется система отсчета.
4. Сила. Величина, являющаяся количественной мерой механического взаимодействия тел, называется силой. За единицу силы в системе СИ принимается Ньютон (Н). Сила, величиной 1 Н, приложенная к покоящемуся телу массой 1 кг, вызывает движение тела с ускорением 1 м/с2. Сила является векторной величиной. Обозначение силы: F⃗ F→ . Действие силы на тело определяется:
a) модулем или скалярной величиной, численно равной длине вектора силы;
b) направлением действия;
c) точкой приложения;
d) линией действия.
Линией действия называется линия, вдоль которой действует вектор силы.
Сила, действующая на тело по малой площадке, называется сосредоточенной (условно считают, – приложена в точке).
Силы, действующие на части объема, поверхности или линии, называются распределенными. Распределенные силы характеризуются интенсивностью , т.е. значением силы, приходящейся на единицу объема (в случае объемных сил), на единицу площади (в случае поверхностных сил), на единицу длины (в случае действия сил по линии).
Пример. 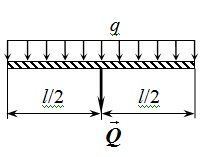
На брус длиной l=10 м действует равномерно распределенная сила интенсивности q=0,2 кН/м, т.е. на каждый метр длины бруса действует сила 0,2 кН. Определим равнодействующую равномерно распределенной силы, которая приложена посредине бруса: Q=ql=0,2 кН/м*10 м = 2 кН.
1. Свободное и несвободное тело. Тело, не скрепленное с другими телами, называется свободным телом. Тело, скрепленное с другими телами, называется несвободным телом.
2. Связь. Тела, ограничивающие перемещения данного тела в пространстве, называются связью.
3. Реакция связи. Сила, с которой данная связь действует на тело, препятствуя его перемещениям, называется силой реакции связи.
4. Направление силы реакции связи. Сила реакции всегда направлена в сторону, противоположную той, куда связь не дает перемещаться телу.
5. Система сил. Совокупность сил, действующих на тело, называется системой сил. Обозначение системы сил: {F⃗ i}{F→i} .
6. Эквивалентность систем сил. Две системы сил эквивалентны если их действие на тело одинаково.
7. Уравновешенная система сил. Система сил, под действием которой тело находится в покое, называется уравновешенной или эквивалентной нулю {F⃗ i}∼0{F→i}∼0 .
8. Равнодействующая сила. Если система сил эквивалентна одной силе, то эта сила называется равнодействующей. Таким образом, равнодействующая это сила, которая одна заменяет действие данной системы сил.
9. Уравновешивающая сила. Сила равная по модулю равнодействующей, противоположная ей по направлению и действующая вдоль той же прямой называется уравновешивающей силой.
10. Скользящий вектор. Если точку приложения вектора можно переносить вдоль линии действия и от этого его действие не меняется, то такой вектор называется скользящим.
11. Свободный вектор. Если точку приложения вектора можно переносить в любую точку тела и от этого его действие не меняется, то такой вектор называется свободным.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|