- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Лабораторная работа №3. Исследование качества систем автоматического управления.. Цель работы: исследовать качество систем автоматического управления, а также определить установившееся значение ошибок и критический коэффициент усиления замкнутых систем.
Лабораторная работа №3
Исследование качества систем автоматического управления.
Цель работы: исследовать качество систем автоматического управления, а также определить установившееся значение ошибок и критический коэффициент усиления замкнутых систем.
Выполнение работы:
Вариант №8
Т1=0,5 Т2=0,2 Т3=0,3 А0=12 А1=6
1.Рассчитали установившиеся значения ошибок заданных систем методом коэффициентов:
а) 


б) 



в) 


г) 

2.Рассчитали критический коэффициент усиления Kкр систем:
а)  ;
;
б)

в) 
г)
3.Определили критический коэффициент усиления Ккр методом подстановки чисел в модель системы и получили:
а) ;

б)

в)

г)

4. Зарисовали ошибки воспроизведения скачкообразного и линейно- изменяющегося воздействия замкнутой системы при двух значениях коэффициента передачи K1=0,1Kкр, K2=0,5Kкр.
а) Задающее воздействие 
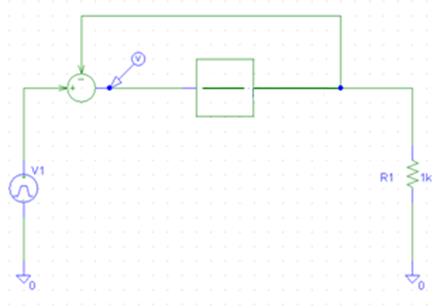
Рисунок 1 – Модель замкнутой системы для получения ошибки воспроизведения скачкообразного воздействия
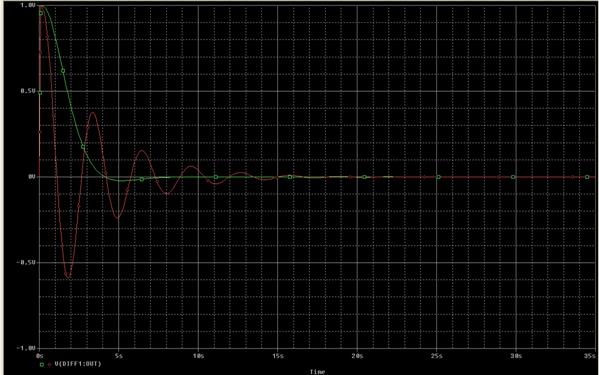
Рисунок 2 – График ошибки воспроизведения скачкообразного воздействия первого звена
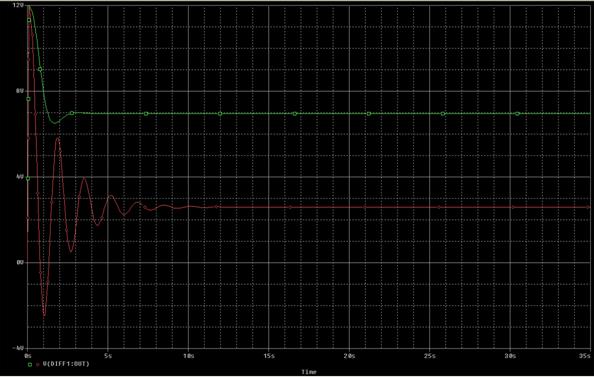
Рисунок 3 - График ошибки воспроизведения скачкообразного воздействия второго звена
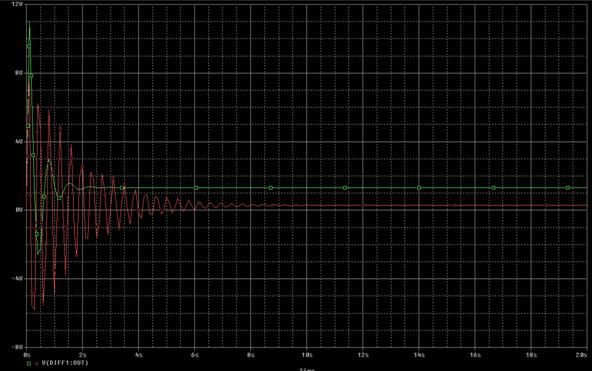
Рисунок 4 - График ошибки воспроизведения скачкообразного воздействия третьего звена
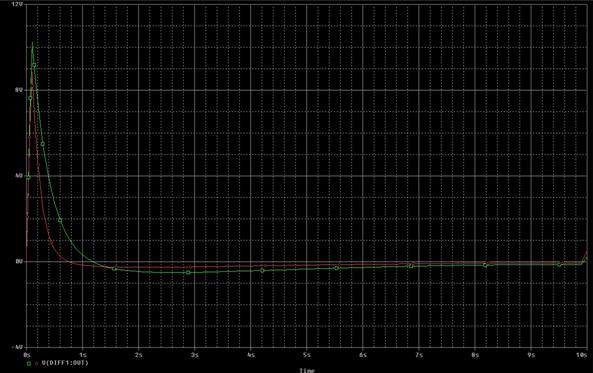
Рисунок 5 - График ошибки воспроизведения скачкообразного воздействия четвертого звена
б) Задающее воздействие 

Рисунок 6 – Модель замкнутой системы для получения ошибки воспроизведения линейно-изменяющегося воздействия
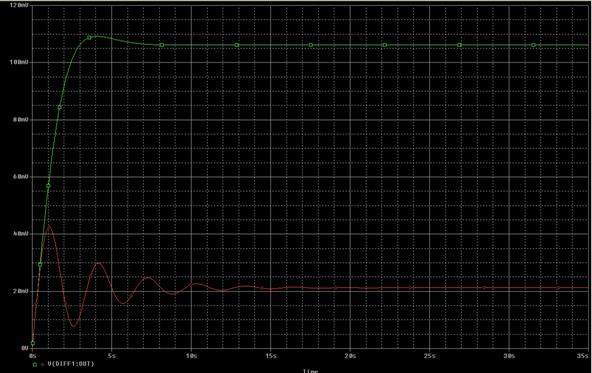
Рисунок 7 - График ошибки воспроизведения линейно-изменяющегося воздействия первого звена
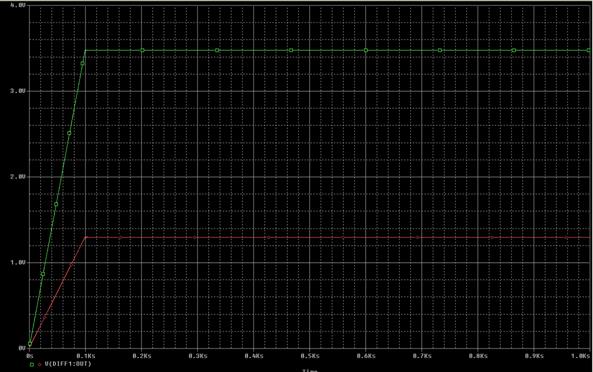
Рисунок 8 - График ошибки воспроизведения линейно-изменяющегося воздействия второго звена
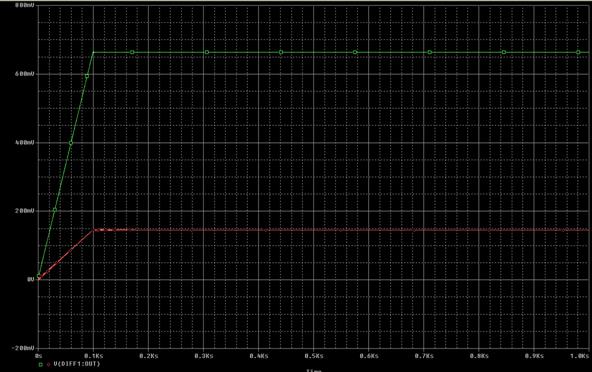
Рисунок 9 - График ошибки воспроизведения линейно-изменяющегося воздействия третьего звена
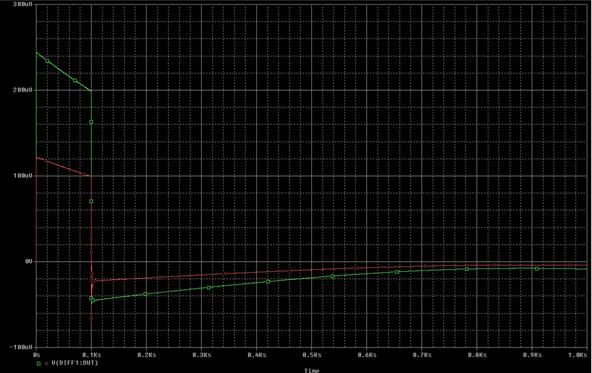
Рисунок 10 - График ошибки воспроизведения линейно-изменяющегося воздействия четвертого звена
5. Зарисовали ошибки системы при тех же исходных данных, при том, что на их выходе действовали скачкообразное и линейно-изменяющееся мешающие воздействия:
а) Задающее воздействие
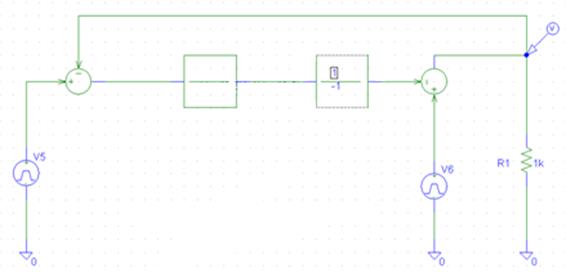
Рисунок 11 – Модель замкнутой системы для получения ошибки воспроизведения скачкообразного воздействия

Рисунок 12 – График ошибки воспроизведения скачкообразного воздействия первого звена

Рисунок 13 - График ошибки воспроизведения скачкообразного воздействия второго звена

Рисунок 14 - График ошибки воспроизведения скачкообразного воздействия третьего звена
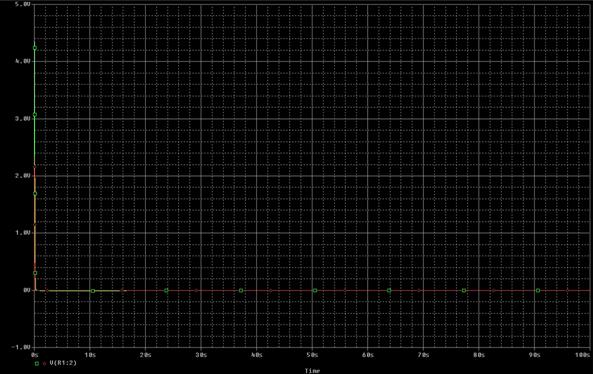
Рисунок 15 - График ошибки воспроизведения скачкообразного воздействия четвертого звена
б) Задающее воздействие
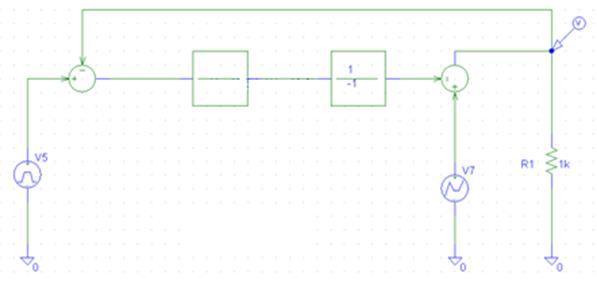
Рисунок 16 – Модель замкнутой системы для получения ошибки воспроизведения линейно-изменяющегося воздействия
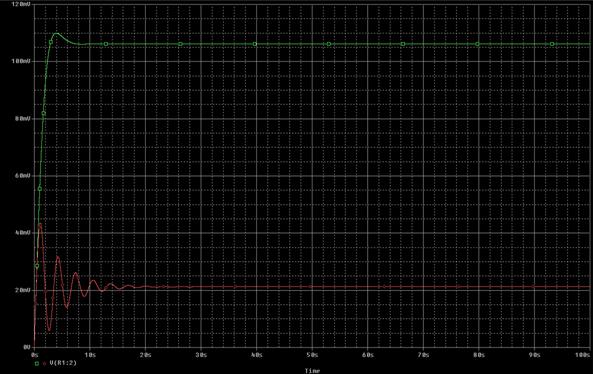
Рисунок 17 - График ошибки воспроизведения линейно-изменяющегося воздействия первого звена
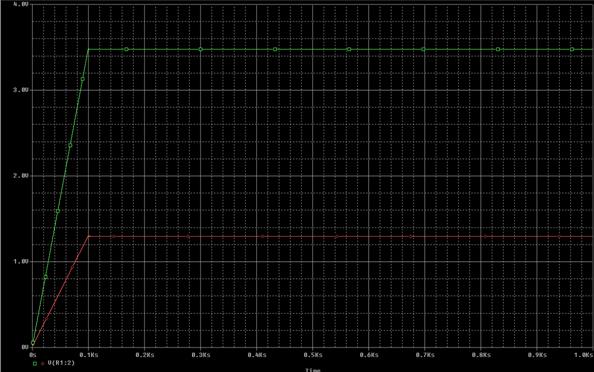
Рисунок 18 - График ошибки воспроизведения линейно-изменяющегося воздействия второго звена
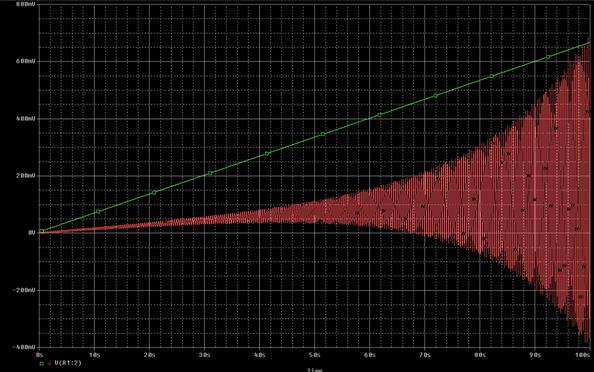
Рисунок 19 - График ошибки воспроизведения линейно-изменяющегося воздействия третьего звена
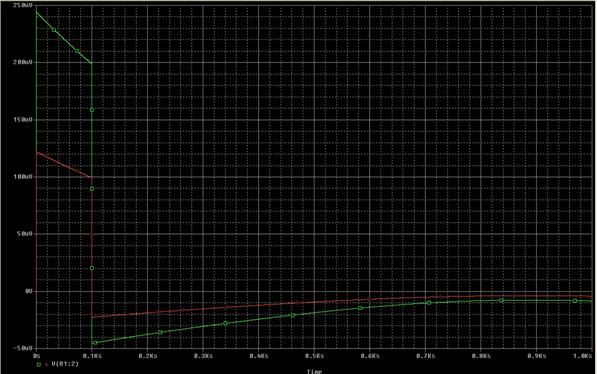
Рисунок 20 - График ошибки воспроизведения линейно-изменяющегося воздействия четвертого звена
Вывод: в ходе выполнения работы исследовали качество систем автоматического управления, а также определили установившиеся значения ошибок и критические коэффициенты усиления замкнутых систем при скачкообразном и линейно-изменяющемся воздействиях. Установили, что значения критического коэффициента усиления Kкр, полученных расчётным путём и методом численного моделирования, не совпадают.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|