- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Минусы: корпус робота очень низко расположен относительно к поверхности стола и робот не сможет проезжать через некоторые препятствия.
Минусы: корпус робота очень низко расположен относительно к поверхности стола и робот не сможет проезжать через некоторые препятствия.
Тактика прохождения поля
| Задание | баллы |
| Вынуть водопровод | |
| Добавить насос | |
| Дождь | |
| Фильтр | |
| Унитаз | |
| Фонтан | |
| Штатив | 1) - 15 2) – 20 |
| Замена трубопровода | |
| Колодец | |
| Кран | |
| ВСЕГО |

06.09.2017
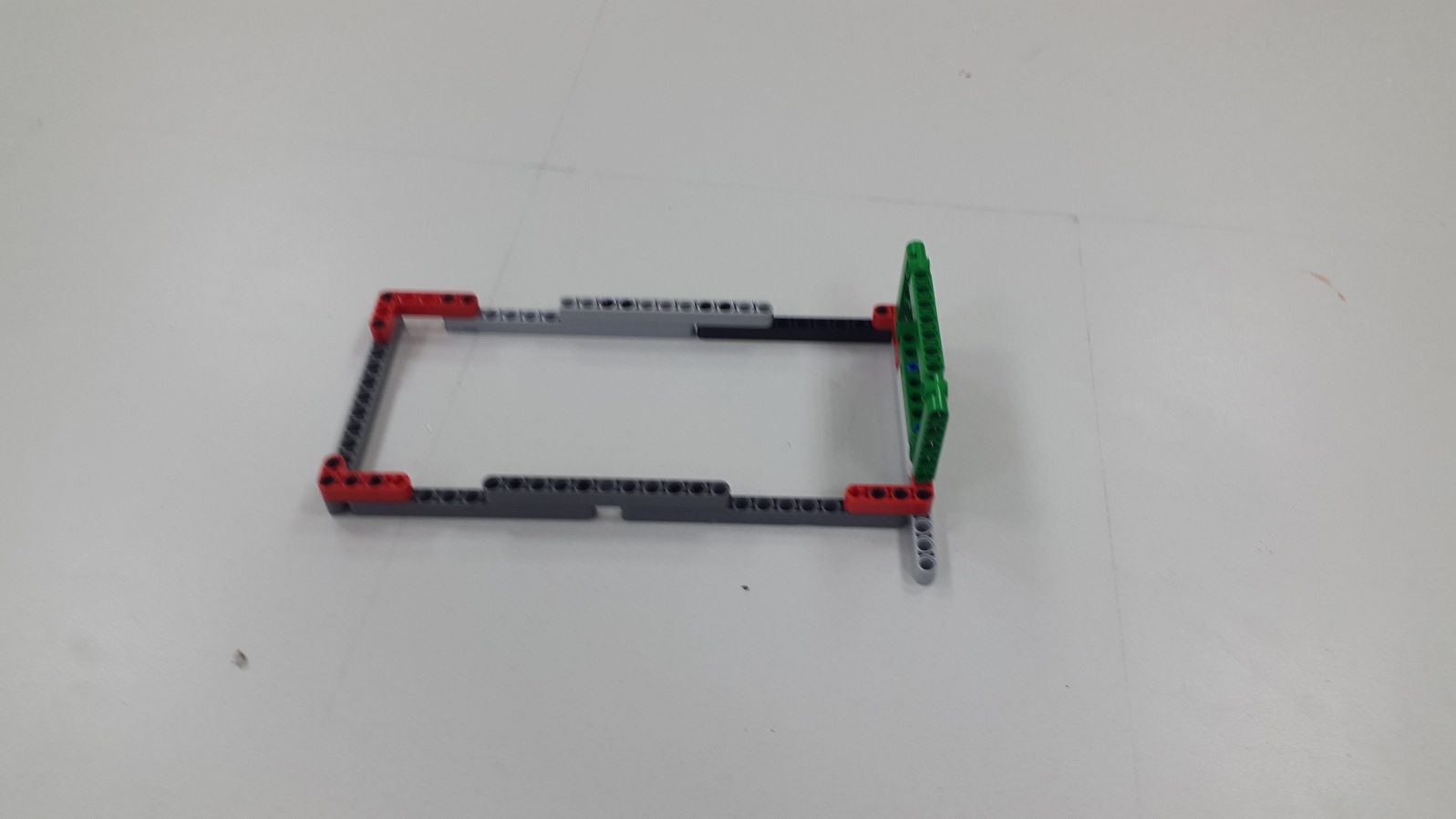
Начали делать робота. Сделали основной, каркас расположили три датчика освещенности, моторы для передвижения и закрепили микроконтроллер EV3. Платформа, на которой располагался микроконтроллер EV3, была полностью ровная без выступающих деталей.
Работу, которую мы сделали, за день была очень продуктивной, но в тоже время и сложной. Было очень много разногласий, как будет выгладить робот, как будет закреплена деталь.
За день до сборки робота мы определились, какой цветовой гаммы он будет, это потому - что у нас в лаборатории много этих деталей. На начальном этапе мы все согласилась с тем мнением, что робот будет компактный, чтобы можно было ставить большие насадки, не выступающие за базу.
08.09.2017
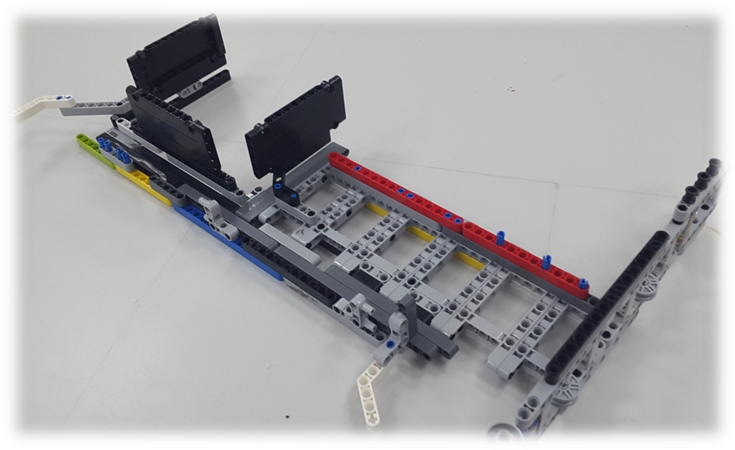
Прикрепили два мотора для управления насадками, также установили в верхней части робота плоские пластины, чтобы робот имел строгую форму квадрата, из–за этого насадки будут устанавливаться удобней и движению мотора провода, не будут мешать

09.09.2017
Начали делать насадку для первых трёх миссий обведённых в красный кружок (рис.6) это миссий фильтр, добавить насос, дождь.
(см. на стр.3) общее количество баллов с одного заезда 65.

(рис.6)
 м
м
13.09
Сделали насадку для первых трех миссий. Она работает на одном моторе, начали программировать. За день мы доделали насадку и запрограммировали робота на выполнение этих миссий.
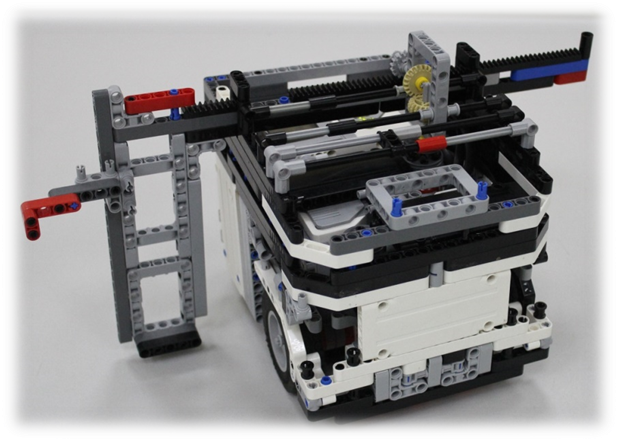
Рис.4

Рис.5
15.09
В этот день удалили нашу программу и мы не взялись писать новую, а начали делать насадку для следующих пяти заданий вынуть водопровод, штатив, фонтан, кран, унитаз.
Мы решили, что сначала без насадки мы доставим бочку в фонтан и вернёмся на базу.

30.10
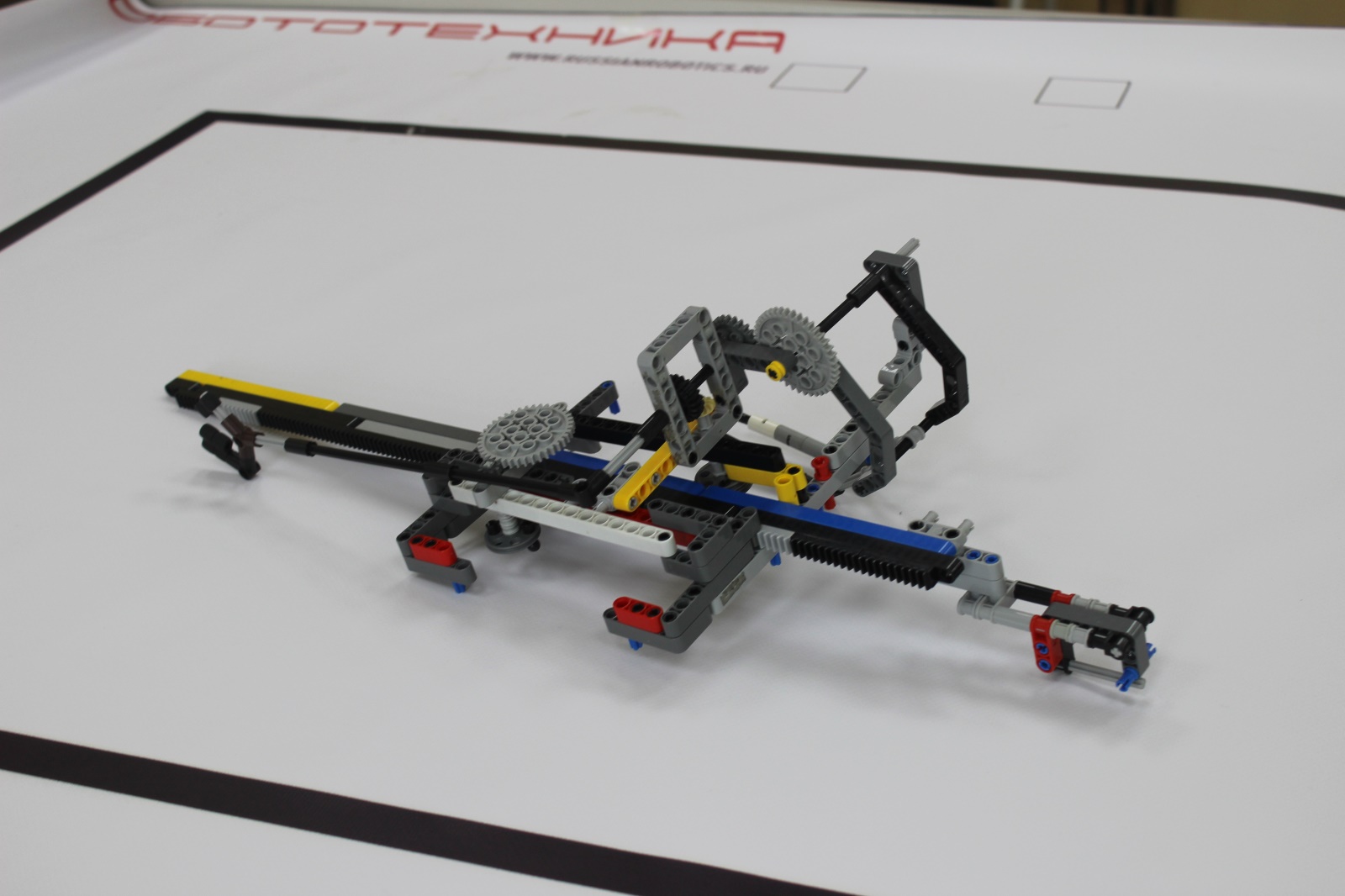
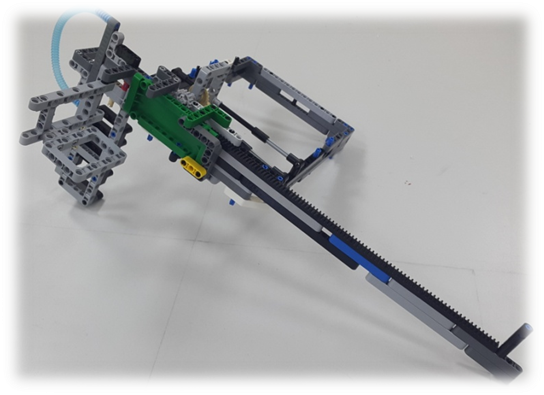
Сегодня мы сделали одну насадку, чтобы забирать трубу, нажимать на унитаз и кладём штатив. Насадка имеет реечную передачу с понижением, а также два усика для Штатива тоже с понижающей передачей.
15.10
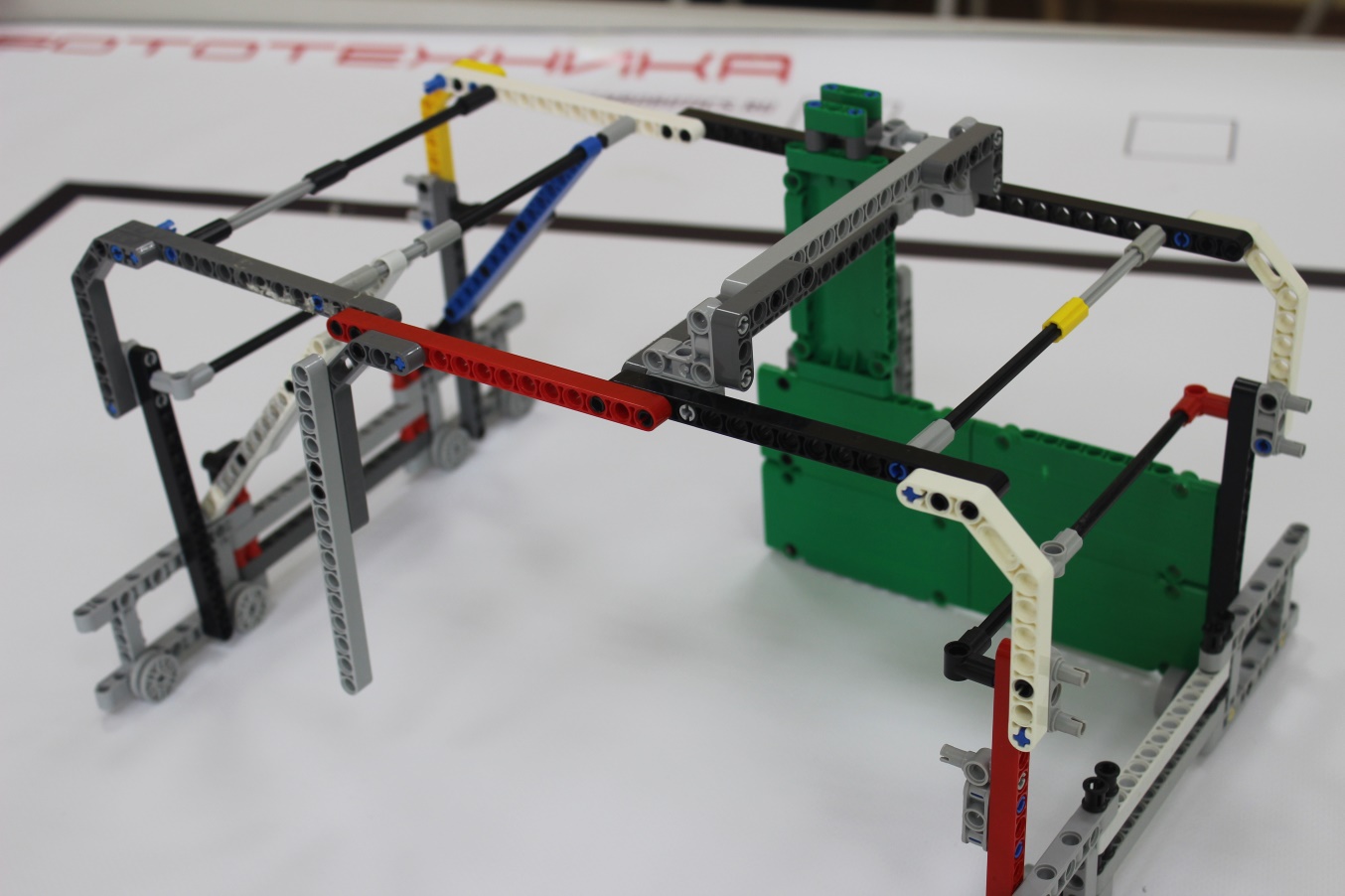
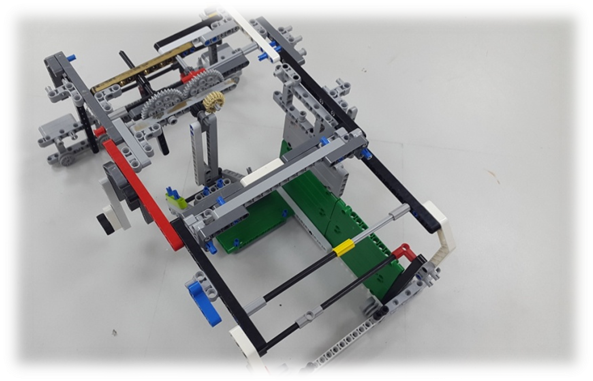
Сделали огромную насадку и начали писать программу для 2 заезда также мы за хотели сделать на ней механизм для выпадения бочки в Фонтан (см 17 стр.). Сделали каркас устойчивости.
10.11
Сегодня мы исправили все недочёты так и в конструкциях так и в программе теперь 2 первых огромных заезда точно принесут нам 170 баллов. Также мы переделали платформу для бочки (см. 22.09), теперь мы скинем ее с помощью большой насадки и особого механизма. Эта работа была очень плодотворной. У нас всё работает.
19.11
IQ robot – наши первые соревнования на поле. Наш робот показал себя не очень хорошо. Хоть мы и заняли 4 место по роботу и 3 место по проекту, для нас это показалось слишком мало и первое место было всего 135 баллов. Также к нам приехали команды из Иркутска Террабит, они заняли 3 место и мы поставили для себя цель «ПОБЕДИТЬ Иркутск» и поставить их в конец списка. После соревнований мы начали исправлять ошибки, а их было очень много, как и в программе, так и в конструкциях. Например, мы решили, что некоторые миссии сделаем отдельно. (Заберём и заменим трубу, доставим колодец). Решили немного отредактировать речь по технической защите. Хоть и оставалась неделя до того как мы поедем в Иркутск, но мы решили рискнуть и переделать все программы и конструкции.
20.11
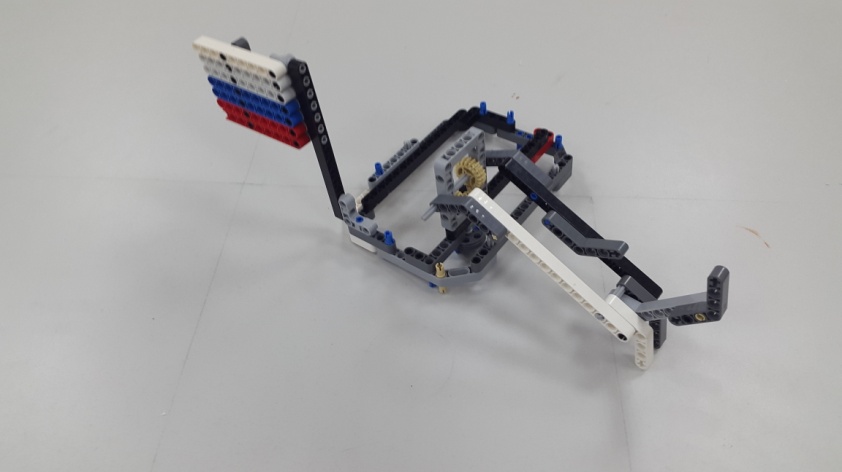
Как говорится «Пошла жара» мы начали исправлять первую насадку. Изменили нахождение и длину реечной передачи и сделали платформу, чтобы ровняться по стене и не делать миссии неточно, как было у нас до этого. Сделали небольшую декорацию - флаг России. Также на половину написали программу. Так как мы учимся во вторую смену, мы приходим после уроков и занимаемся второпях, понимая, что осталось 7 дней до посадки на поезд.
22.11
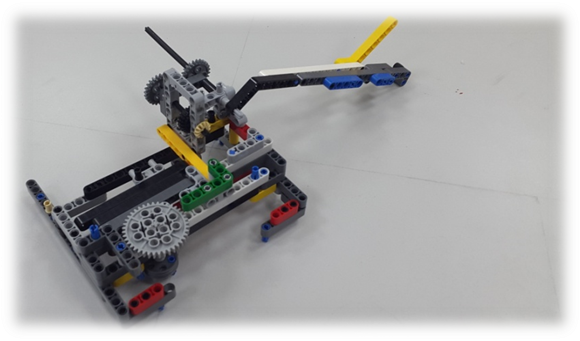
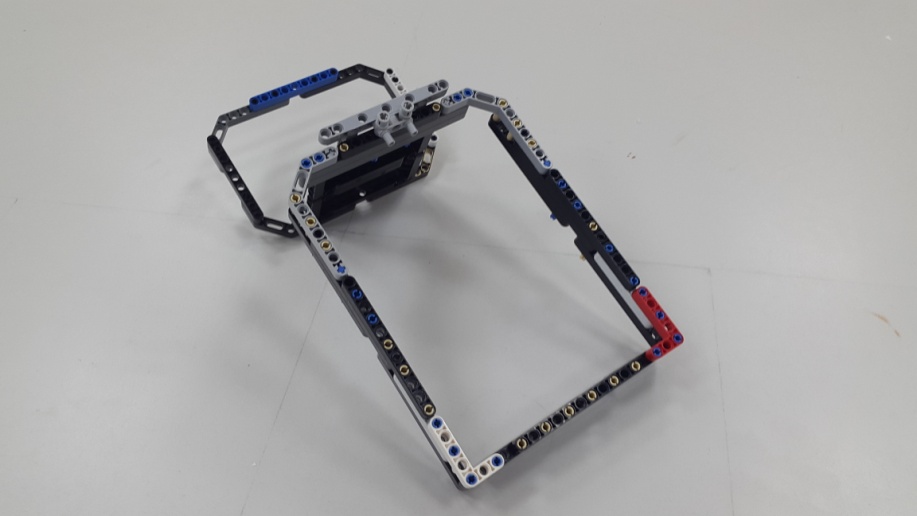
Дописали первую программу и закрепили насадку и начали делать вторую насадку, которой мы будем выполнять 4 миссии (Штатив, Унитаз, Фонтан, Кран) Всё у нас должно работать на одном моторе и зубчатой передаче с понижением, чтобы с большой силой нажать на Унитаз. А конструкция для фонтана и для кружки осталась прежней большая платформа и нечего лишнего. Также написали тех. защиту написали программу для второй насадки. Также убрали реечную передачу для трубы, теперь мы ее заберём с помощью третьей насадки.
23.11
Сделали две маленьких насадки и один уголок чтобы точно ставить робота . Первая для того чтобы привезти грязную трубу и привезти чистую трубу. Вторая чтобы привести колодец в зону, когда он будет ровно в зоне, мы крикнем «СТОП», что значит, что мы закончили заезд. У первой насадки не было ничего такого очень навороченного, просто понижающая передача, как мы любим и балки, которые служили в роли крюка. Во второй насадке мы вообще не использовали мотора, мы помещаем колодец в центр каркаса и везём на базу.
24.11
Запрограммировали две новых насадки, которые сделали вчера. И сделали маленечко декора на насадках. Как говорится «Красота требует жертв».
Также немного поправили программы. Также начали учить речь по технической защите.
25.11
Поправили программы, теперь всё идеально работает. Это вы можете увидеть в нашей группе ВК.
Все пять программ показывают себя очень хорошо. Мы задумали, что после Иркутска мы выполним миссию “Пожарная машина”.
30.11
Сегодня у нас были тренировочные заезды на поле в Иркутске. Все программы работают хорошо.
01.12
Сегодня было выступление на поле FLL в Иркутске. Наш робот набрал 110 баллов, мы заняли 3-е место в номинации “Robot-Game”
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|