| №
| Наименование связи
| Условное обозначение
|
|
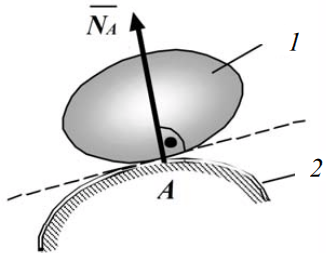
| Гладкая поверхность (опора) – поверхность (опора), трением о которую данного тела можно пренебречь.
При свободном опирании реакция  направляется перпендикулярно касательной, проведенной через точку А контакта тела 1 с опорной поверхностью 2. направляется перпендикулярно касательной, проведенной через точку А контакта тела 1 с опорной поверхностью 2.
| 
|
|
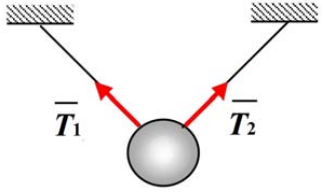
| Нить (гибкая, нерастяжимая). Связь, осуществлённая в виде нерастяжимой нити, не позволяет телу удаляться от точки подвеса. Поэтому реакция нити направлена вдоль нити к точке её подвеса.
| 
|
|
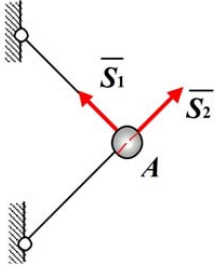
| Невесомый стержень – стержень, весом которого по сравнению с воспринимаемой нагрузкой можно пренебречь. Реакция невесомого шарнирно прикрепленного прямолинейного стержня направлена вдоль оси стержня.
| 
|
|
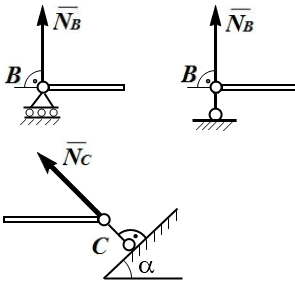
| Подвижный шарнир, шарнирно-подвижная опора. Реакция направлена по нормали к опорной поверхности.
| 
|
|
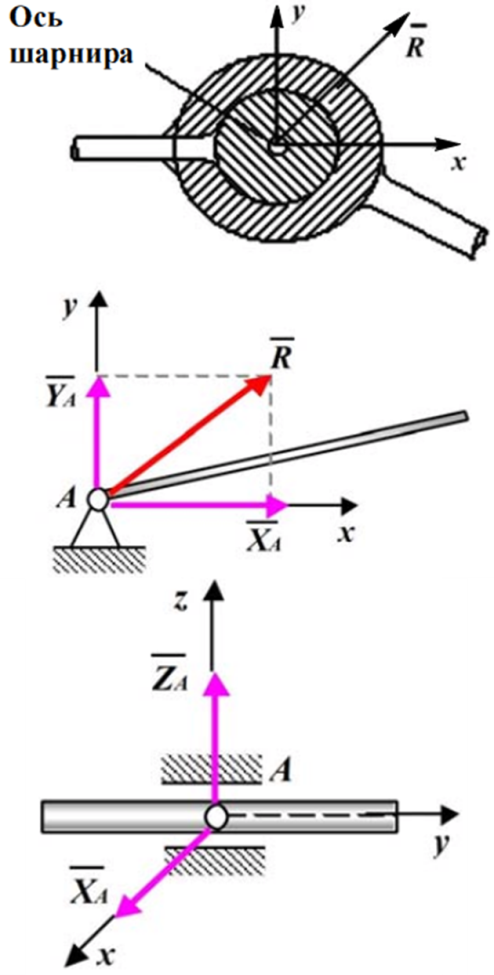
| Цилиндрический шарнир (подшипник, шарнирно-неподвижная опора). При осуществлении связи в виде цилиндрического шарнира одно тело может поворачиваться относительно другого вокруг общей оси, называемой осью шарнира. Реакция  цилиндрического шарнира заранее не известна ни по величине, ни по направлению; может иметь любое направление в плоскости, перпендикулярной оси шарнира. Модуль и направление полной реакции определяют две составляющие реакции в этой плоскости. цилиндрического шарнира заранее не известна ни по величине, ни по направлению; может иметь любое направление в плоскости, перпендикулярной оси шарнира. Модуль и направление полной реакции определяют две составляющие реакции в этой плоскости.
| 
|
|
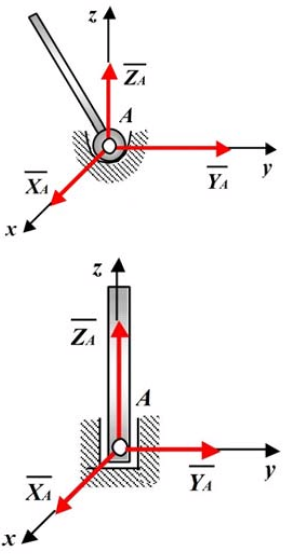
| Сферический (шаровый) шарнир, подпятник.Тела, соединённые с помощью сферического шарнира, могут как угодно поворачиваться относительно центра шарнира. Реакция сферического шарнира может иметь любое направление в пространстве. Реакция сферического шарнира и подпятника (подшипника с упором) может иметь любое направление в пространстве. Три составляющие  , ,  , ,  реакции определяют модуль и направление полной реакции. реакции определяют модуль и направление полной реакции.
| 
|
|
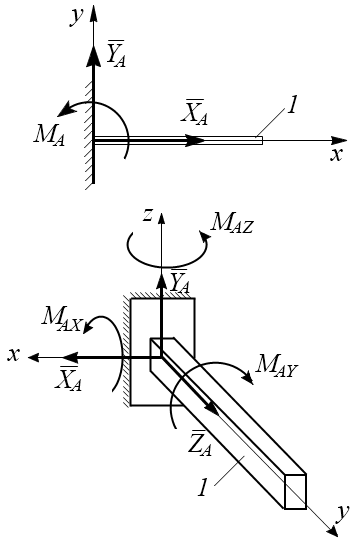
| Жесткая заделка.В плоскости жесткой заделки будут две составляющие реакции , и момент пары сил  , который препятствует повороту балки 1 относительно точки А. Жесткая заделка в пространстве отнимает у тела 1 все шесть степеней свободы – три переме-щения вдоль осей координат и три поворота отно-сительно этих осей. В пространственной жесткой заделке будут три составляющие , , и три момента пар сил , который препятствует повороту балки 1 относительно точки А. Жесткая заделка в пространстве отнимает у тела 1 все шесть степеней свободы – три переме-щения вдоль осей координат и три поворота отно-сительно этих осей. В пространственной жесткой заделке будут три составляющие , , и три момента пар сил  . .
| 
|
|
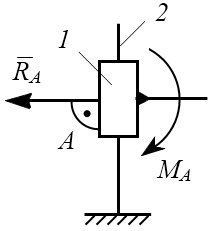
| Ползун 1 на стержне 2. Рекция направлена перпендикулярно стержню 2, момент пары сил препятствует повороту ползуна 1 относительно точки А.
| 
|
|
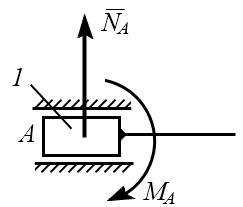
| Ползун 1 в направляющих. Рекция направлена перпендикулярно направляющим, момент пары сил препятствует повороту ползуна 1 относительно точки А.
| 
|