- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Приложение 1
Введение
Я, Исатаев Алмаз, с 9 по 20 июля находился в загранкомандировке в AGH University of science and technology. По прибытию в AGH University of science and technology 9 июля 2018 года, мы направились в отдел международных образовательных программ, где заполнили все необходимые документы, а также нам провели ознакомительную экскурсию по университету. После чего нас познакомили с нашим руководителем, профессором Яцек Цеслик. Обсудили наши дальнейшие действия с руководителем, а также ознакомились с учебным процессом. На следующий день прошел семинар на тему «Introduction to computer vision.Image formation and pre-processing ».
Во время учебной стажировки мы изучили курс «Machine learning. Programmable controllers». На этом курсе мы работали на платформе быстрой разработки электронных устройств Arduino. Первым делом мы изучили основные комплектующие платы Arduino. После были выполнены разные задания по запуску различных схем с выводом результатов, таких как работа мигающих ламп, запуск таймера по нажатию на кнопку.
Были изучены алгоритмы распределения задач по миллисекундам и их поочередная обработка. С 9 по 19 июля была практика по научным лабораториям университета. 20 июля мы защитились перед руководителем Яцек Цеслик.
1. Отчетность по дням.
9 июля-Лекции на тему «Introduction to computer vision. Image formation and pre-processing»
Компьютерное зрение (иначе техническое зрение) — теория и технология создания машин, которые могут производить обнаружение, отслеживание и классификацию объектов.
Как научная дисциплина, компьютерное зрение относится к теории и технологии создания искусственных систем, которые получают информацию из изображений. Видеоданные могут быть представлены множеством форм, таких как видеопоследовательность, изображения с различных камер или трехмерными данными, например с устройства Kinect или медицинского сканера.
Как технологическая дисциплина, компьютерное зрение стремится применить теории и модели компьютерного зрения к созданию систем компьютерного зрения. Примерами применения таких систем могут быть:
1. Системы управления процессами (промышленные роботы, автономные транспортные средства).
2. Системы видеонаблюдения.
3. Системы организации информации (например, для индексации баз данных изображений).
4. Системы моделирования объектов или окружающей среды (анализ медицинских изображений, топографическое моделирование).
5. Системы взаимодействия (например, устройства ввода для системы человеко-машинного взаимодействия).
6. Системы дополненной реальности.
7. Вычислительная фотография, например для мобильных устройств с камерами.
Компьютерное зрение также может быть описано как дополнение (но не обязательно противоположность) биологическому зрению. В биологии изучается зрительное восприятие человека и различных животных, в результате чего создаются модели работы таких систем в терминах физиологических процессов. Компьютерное зрение, с другой стороны, изучает и описывает системы компьютерного зрения, которые выполнены аппаратно или программно. Междисциплинарный обмен между биологическим и компьютерным зрением оказался весьма продуктивным для обеих научных областей.
Подразделы компьютерного зрения включают воспроизведение действий, обнаружение событий, слежение, распознавание образов, восстановление изображений и некоторые другие.
В настоящее время системы технического зрения (СТЗ) достаточно широко и успешно применяются во многих отраслях промышленности при таких операциях, как контроль и отбраковка различных деталей и изделий по внешнему виду, загрузка обрабатывающих станков деталями с конвейеров или из бункеров, сортировка и ориентированная укладка в кассеты деталей и заготовок, в том числе неупорядоченно движущихся по конвейеру или поступающих в таре навалом, сборка и комплектация узлов и др. [1]. Основной задачей СТЗ является распознавание в поле зрения: 1) единственного объекта; 2) нескольких (однотипных и разнотипных) изолированных друг от друга объектов; 3) двух и больше (однотипных и разнотипных) соприкасающихся и наложенных друг на друга объектов. На практике при использовании СТЗ возможно возникновение необходимости распознавания перечисленных объектов (как отдельно, так и в совокупности). Распознавание с высокой достоверностью однотипных и разнотипных изолированных друг от друга объектов возможно с помощью несложных алгоритмов [2, 3]. Сложности возникают при распознавании соприкасающихся и наложенных объектов. При этом необходимо знать закон соприкосновения и наложения объектов, поскольку если, например, один плоский объект закрывает большую часть другого, чаще всего не удается идентифицировать закрытый объект. Настоящая статья посвящена статистическому выявлению наложенности двух одно- и разнотипных объектов в поле зрения СТЗ с помощью имитационного моделирования бросания деталей на ленту конвейера.
10 июля – Лекции на тему «Image features. Multiple images»
Бинарные изображения
Начнем со случая, когда в поле зрения находится объект, а все остальное считается “фоном”. Если объект оказывается заметно темнее (или светлее), чем фон, то легко определить характеристическую функцию  , которая равна нулю для всех точек изображения, соответствующих фону, и единице для точек на объекте (рис.1) или наоборот.
, которая равна нулю для всех точек изображения, соответствующих фону, и единице для точек на объекте (рис.1) или наоборот.

Рис. 1. Бинарное изображение, определяемое характеристической функцией , которая принимает значение “нуль” и “единица”.
Часто бинарное изображение получают пороговым разделением обычного изображения. К нему также можно прийти путем порогового разделения расстояния на “изображении”, полученном на основе измерений расстояний.
Такую функцию, принимающую два значения и называемую бинарным изображением, можно получить пороговым разделением полутонового изображения. Операция порогового разделения заключается в том, что характеристическая функция полагается равной нулю в точках, где яркость больше некоторого порогового значения, и единице, где она не превосходит его (или наоборот).
Иногда бывает удобно компоненты изображения, а также отверстия в них рассматривать как множества точек. Это позволяет комбинировать изображения с помощью теоретико–множественных операций, например, объединение и пересечение. В других случаях удобно поточечно использовать булевые операции. На самом деле это лишь два различных способа описания одних и тех же действий над изображениями.
Поскольку количество информации, содержащиеся в бинарном изображении, на порядок меньше, чем в совпадающем с ним по размерам полутоновом изображении, бинарное изображение легче обрабатывать, хранить и пересылать. Естественно, определенная часть информации при переходе к бинарным изображениям теряется, и, кроме того, сужается круг методов обработки таких изображений. В настоящее время существует достаточно полная теория того, что можно и чего нельзя делать с бинарными изображениями, чего, к сожалению, нельзя сказать о полутоновых изображениях.
Прежде всего мы можем вычислить различные геометрические характеристики изображения, например, размер и положение объекта. Если в поле зрения находится более одного объекта, то можно определить топологические характеристики имеющейся совокупности объектов: например, разность между числом объектов и числом отверстий (число Эйлера).
Пример:
Этой операции соответствует функция BWEULER – вычисление чисел Эйлера в пакете Image Processing Toolbox:
L=imread('test.bmp');
L=double(L);
imshow(L);
Поскольку изображения содержат большой объем информации, важную роль начинают играть вопросы ее представления. Покажем, что интересующие нас геометрические характеристики можно извлечь из проекций бинарных изображений. Проекции гораздо легче хранить и обрабатывать. Также рассмотрим непрерывные бинарные изображения, характеристическая функция которых равна нулю или единице в каждой точке плоскости изображения. Это упрощает анализ, однако при использовании ЭВМ изображение необходимо разбить на дискретные элементы.
Нетрудно также пометить отдельные объекты и вычислить геометрические характеристики для каждого из них в отдельности. Наконец, перед дальнейшей обработкой изображение можно упростить, постепенно модифицируя его итеративным образом.
Обработка бинарных изображений хорошо понятна, и ее нетрудно приспособить под быструю аппаратную реализацию, но при этом нужно помнить об ограничениях. Мы уже упоминали о необходимости высокой степени контраста между объектом и фоном. Кроме того, интересующий нас образ должен быть существенно двумерным. Ведь все, чем мы располагаем, — лишь очертания или силуэт объекта. По такой информации трудно судить о его форме или пространственном положении.
Характеристическая функция определена в каждой точке изображения. Такое изображение будем называть непрерывным. Позже мы рассмотрим дискретные бинарные изображения, получаемые путем подходящего разбиения поля изображения на элементы.
11 июля – Лекции на тему «Оптический поток (Optical flow)»
Оптический поток (Optical flow) – технология, использующаяся в различных областях computer vision для определения сдвигов, сегментации, выделения объектов, компрессии видео.
Оптический поток (ОП) – изображение видимого движения, представляющее собой сдвиг каждой точки между двумя изображениями. Он представляет собой поле скоростей (т. к. сдвиг с точностью до масштаба эквивалентен мгновенной скорости). Суть ОП в том, что для каждой точки изображения находится такой сдвиг (dx, dy), чтобы исходной точке соответствовала точка на втором изображении  . Для определения соответствия точек надо взять какую-то функцию точки, которая не изменяется в результате смещения. Обычно считается, что у точки сохраняется интенсивность (т. е. яркость или цвет для цветных изображений), но можно считать одинаковыми точки, у которых сохраняется величина градиента, гессиан, его величина или его определитель, лапласиан, другие характеристики. Очевидно, сохранение интенсивности дает сбои, если меняется освещенность или угол падения света. Тем не менее, если речь идет о видеопотоке, то, скорее всего, между двумя кадрами освещение сильно не изменится, хотя бы потому, что между ними проходит малый промежуток времени. Поэтому часто используют интенсивность в качестве функции, сохраняющейся у точки.
. Для определения соответствия точек надо взять какую-то функцию точки, которая не изменяется в результате смещения. Обычно считается, что у точки сохраняется интенсивность (т. е. яркость или цвет для цветных изображений), но можно считать одинаковыми точки, у которых сохраняется величина градиента, гессиан, его величина или его определитель, лапласиан, другие характеристики. Очевидно, сохранение интенсивности дает сбои, если меняется освещенность или угол падения света. Тем не менее, если речь идет о видеопотоке, то, скорее всего, между двумя кадрами освещение сильно не изменится, хотя бы потому, что между ними проходит малый промежуток времени. Поэтому часто используют интенсивность в качестве функции, сохраняющейся у точки.
Есть два варианта расчета оптического потока: плотный (dense) и выборочный (sparse). Sparse поток рассчитывает сдвиг отдельных заданных точек (например, точек, выделенных некоторым feature detector'ом), dense поток считает сдвиг всех точек изображения.
Для вырожденных случаев можно применять более простые методы определения сдвига. В частности, если все точки изображения имеют один и тот же сдвиг (изображение сдвинуто целиком), то можно применить метод фазовой корреляции: вычислить преобразование Фурье для обоих изображений, найти свертку их фаз и по ней определить сдвиг можно применять поблочное сравнение (block matching): находить сдвиг, минимизирующий норму разности изображений в окне. В чистом виде такой алгоритм будет работать долго и неустойчиво к поворотам и прочим искажениям.
Сегментация изображения — это разбиение изображения на множество покрывающих его областей. Сегментация применяется во многих областях, например, в производстве для индикации дефектов при сборке деталей, в медицине для первичной обработки снимков, также для составления карт местности по снимкам со спутников.
OpenCV.
Алгоритм работает с изображением как с функцией от двух переменных f=I(x,y), где x,y – координаты пикселя.
Значением функции может быть интенсивность или модуль градиента. Для наибольшего контраста можно взять градиент от изображения. Если по оси OZ откладывать абсолютное значение градиента, то в местах перепада интенсивности образуются хребты, а в однородных регионах – равнины. После нахождения минимумов функции f, идет процесс заполнения “водой”, который начинается с глобального минимума. Как только уровень воды достигает значения очередного локального минимума, начинается его заполнение водой. Когда два региона начинают сливаться, строится перегородка, чтобы предотвратить объединение областей. Вода продолжит подниматься до тех пор, пока регионы не будут отделяться только искусственно построенными перегородками.
Такой алгоритм может быть полезным, если на изображении небольшое число локальных минимумов, в случае же их большого количества возникает избыточное разбиение на сегменты. В результате работы алгоритма мы получаем маску с сегментированным изображением, где пиксели одного сегмента помечены одинаковой меткой и образуют связную область. Основным недостатком данного алгоритма является использование процедуры предварительной обработки для картинок с большим количеством локальных минимумов (изображения со сложной текстурой и с обилием различных цветов).
13 июля – Лекции на тему «Алгоритм сегментации MeanShift»
MeanShift группирует объекты с близкими признаками. Пиксели со схожими признаками объединяются в один сегмент, на выходе получаем изображение с однородными областями.
Например, в качестве координат в пространстве признаков можно выбрать координаты пикселя (x, y) и компоненты RGB пикселя. Изобразив пиксели в пространстве признаков, можно заметить сгущения в определенных местах.
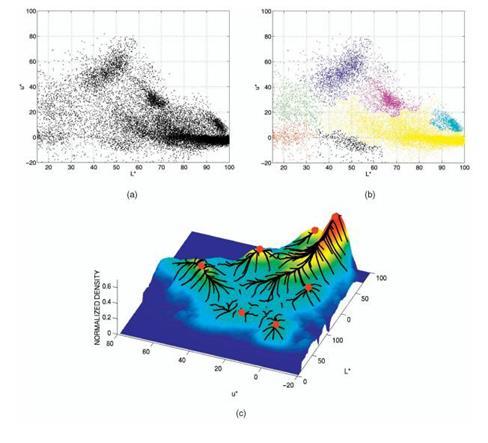
Рис. 1. - (a) Пиксели в двухмерном пространстве признаков. (b) Пиксели, пришедшие в один локальный максимум, окрашены в один цвет. (с)  — функция плотности, максимумы соответствуют местам наибольшей концентрации пикселей.
— функция плотности, максимумы соответствуют местам наибольшей концентрации пикселей.
Чтобы легче было описывать сгущения точек, вводится функция плотности: 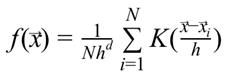
 – вектор признаков i-ого пикселя, d — количество признаков, N — число пикселей, h — параметр, отвечающий за гладкость,
– вектор признаков i-ого пикселя, d — количество признаков, N — число пикселей, h — параметр, отвечающий за гладкость,  — ядро. Максимумы функции
— ядро. Максимумы функции  расположены в точках сгущения пикселей изображения в пространстве признаков. Пиксели, принадлежащие одному локальному максимуму, объединяются в один сегмент. Получается, чтобы найти к какому из центров сгущения относится пиксель, надо шагать по градиенту для нахождения ближайшего локального максимума.
расположены в точках сгущения пикселей изображения в пространстве признаков. Пиксели, принадлежащие одному локальному максимуму, объединяются в один сегмент. Получается, чтобы найти к какому из центров сгущения относится пиксель, надо шагать по градиенту для нахождения ближайшего локального максимума.
14 – июля
Оценка градиента от функции плотности
При выборе в качестве признаков координат пикселей и интенсивностей по цветам в один сегмент будут объединяться пиксели с близкими цветами и расположенные недалеко друг от друга. Соответственно, если выбрать другой вектор признаков, то объединение пикселей в сегменты уже будет идти по нему. Например, если убрать из признаков координаты, то небо и озеро будут считаться одним сегментом, так как пиксели этих объектов в пространстве признаков попали бы в один локальный максимум. Если объект, который хотим выделить, состоит из областей, сильно различающихся по цвету, то MeanShift не сможет объединить эти регионы в один, и наш объект будет состоять из нескольких сегментов. Но зато хорошо справиться с однородным по цвету предметом на пестром фоне. Ещё MeanShift используют при реализации алгоритма слежения за движущимися объектами.
Алгоритм сегментации FloodFill
С помощью FloodFill (заливка или метод «наводнения») можно выделить однородные по цвету регионы. Для этого нужно выбрать начальный пиксель и задать интервал изменения цвета соседних пикселей относительно исходного. Интервал может быть и несимметричным. Алгоритм будет объединять пиксели в один сегмент (заливая их одним цветом), если они попадают в указанный диапазон. На выходе будет сегмент, залитый определенным цветом, и его площадь в пикселях. Такой алгоритм может быть полезен для заливки области со слабыми перепадами цвета однородным фоном. Одним из вариантов использования FloodFill может быть выявление поврежденных краев объекта. Например, если, заливая однородные области определенным цветом, алгоритм заполнит и соседние регионы, то значит нарушена целостность границы между этими областями. Ниже на изображении можно заметить, что целостность границ заливаемых областей сохраняется.
Алгоритм сегментации GrabCut
Это интерактивный алгоритм выделения объекта, разрабатывался как более удобная альтернатива магнитному лассо (чтобы выделить объект, пользователю требовалось обвести его контур с помощью мыши). Для работы алгоритма достаточно заключить объект вместе с частью фона в прямоугольник (grab). Сегментирование объекта произойдет автоматически (cut).
Могут возникнуть сложности при сегментации, если внутри ограничивающего прямоугольника присутствуют цвета, которые встречаются в большом количестве не только в объекте, но и на фоне. В этом случае можно поставить дополнительные метки объекта (красная линия) и фона (синяя линия). Мы рассмотрели только небольшую часть существующих алгоритмов. В результате сегментации на изображении выделяются области, в которые объединяются пиксели по выбранным признакам. Для заливки однородных по цвету объектов подойдет FloodFill. С задачей отделения конкретного объекта от фона хорошо справится GrabCut. Если использовать реализацию MeanShift из OpenCV, то пиксели, близкие по цвету и координатам, будут кластеризованы. WaterShed подойдет для изображений с простой текстурой. Таким образом, алгоритм сегментации следует выбирать, конечно, исходя из конкретной задачи.
16 июля-Лекции по Multi-input ,Multi-output Systems
Multi-input ,Multi-output Systems — метод пространственного кодирования сигнала, позволяющий увеличить полосу пропускания канала, в котором передача данных и прием данных осуществляются системами из нескольких антенн. Передающие и приёмные антенны разносят так, чтобы корреляция между соседними антеннами была слабой.
В современных системах связи, например, в сотовых системах связи, высокоскоростных локальных вычислительных сетях и др., существует необходимость повышения пропускной способности. Пропускная способность может быть увеличена путём расширения полосы частот. Тем не менее, применимость этих методов ограничена из-за требований биологической защиты, ограниченной мощности источника питания (в мобильных устройствах) и электромагнитной совместимости. Поэтому если в системах связи эти подходы не обеспечивают необходимую скорость передачи данных, то эффективным может оказаться применение адаптивных антенных решёток со слабо коррелированными антенными элементами. Системы связи с такими антеннами получили название систем MIMO.
В обычной беспроводной связи в источнике используется одна антенна, а другая другая антенна используется в пункте назначения. В некоторых случаях это вызывает проблемы с многолучевыми эффектами. Когда электромагнитное поле (электромагнитное поле) встречается с препятствиями, такими как холмы, каньоны, здания и служебные провода, волновые фронты разбросаны и, следовательно, они занимают много путей для достижения цели. Позднее появление рассеянных участков сигнала вызывает такие проблемы, как затухание, вырезание (эффект скалы) и прерывистый прием (ограждение пикета). В системах цифровой связи, таких как беспроводной Интернет, это может привести к снижению скорости передачи данных и увеличению количества ошибок. Использование двух или более антенн вместе с передачей нескольких сигналов (по одной для каждой антенны) у источника и адресата устраняет проблему, вызванную распространением многолучевого распространения, и может даже воспользоваться этим эффектом.
17 июля-Лекции по Pattern Recognition, Controllers(Time series analysis and patterns extraction using mathematical transformatios)
Методы моделирования и прогнозирования, обсуждаемые в разделе «Определение шаблонов в данных временных рядов», включали знания о математической модели процесса. Тем не менее, в реальных исследованиях и практике модели данных неясны, отдельные наблюдения содержат значительную ошибку, и нам все еще нужно не только выявлять скрытые шаблоны данных, но и генерировать прогнозы. Методология ARIMA, разработанная Box and Jenkins (1976), позволяет нам делать именно это; он приобрел огромную популярность во многих областях, и исследовательская практика подтверждает его силу и гибкость (Hoff, 1983; Pankratz, 1983; Vandaele, 1983). Однако, благодаря своей мощности и гибкости, ARIMA представляет собой сложную технику; он нелегкий в использовании, он требует большого опыта и, хотя он часто дает удовлетворительные результаты, эти результаты зависят от уровня знаний исследователя (Bails & Peppers, 1982). В следующих разделах будут представлены основные идеи этой методологии. Для тех, кто интересуется кратким, ориентированным на приложения (не математическим), знакомством с методами ARIMA, мы рекомендуем McDowall, McCleary, Meidinger и Hay (1980).
Авторегрессионный процесс. Большинство временных рядов состоят из элементов, которые последовательно зависят от того, что вы можете оценить коэффициент или набор коэффициентов, которые описывают последовательные элементы серии из конкретных, отстающих по времени (предыдущих) элементов. Это можно суммировать в уравнении: xt = + 1 * x (t-1) + 2 * x (t-2) + 3 * x (t-3) + ... +
Где:
является константой (перехватом) и
1, 2, 3 являются параметрами модели авторегрессии.
Полагая слова, каждое наблюдение составлено из случайной составляющей ошибки (случайный шок) и линейной комбинации предыдущих наблюдений.
Требование стационарности. Обратите внимание, что процесс авторегрессии будет только стабильным, если параметры находятся в определенном диапазоне; например, если имеется только один параметр авторегрессии, то он должен находиться в интервале -1 <<1. В противном случае будут накапливаться прошлые эффекты, а значения последовательных xt будут двигаться в бесконечность, то есть серия не будет быть стационарным. Если имеется более одного параметра авторегрессии, можно определить аналогичные (общие) ограничения на значения параметров (например, Box & Jenkins, 1976; Montgomery, 1990).
Скользящий средний процесс. Независимо от процесса авторегрессии каждый элемент серии также может быть затронут прошлой ошибкой (или случайным шоком), которая не может быть учтена компонентом авторегрессии, то есть:
xt = μ + t - 1 * (t-1) - 2 * (t-2) - 3 * (t-3) - ...
Где:
μ - постоянная, и
1, 2, 3 - параметры модели скользящей средней.
18 июля - Лекции по Machine learning. Programmable controllers
Machine learning - класс методов искусственного интеллекта, характерной чертой которых является не прямое решение задачи, а обучение в процессе применения решений множества сходных задач. Для построения таких методов используются средства математической статистики, численных методов, методов оптимизации, теории вероятностей, теории графов, различные техники работы с данными в цифровой форме.
Различают два типа обучения:
1.Обучение по прецедентам, или индуктивное обучение, основано на выявлении эмпирических закономерностей в данных.
2.Дедуктивное обучение предполагает формализацию знаний экспертов и их перенос в компьютер в виде базы знаний.
Дедуктивное обучение принято относить к области экспертных систем, поэтому термины машинное обучение и обучение по прецедентамможно считать синонимами.Многие методы индуктивного обучения разрабатывались как альтернатива классическим статистическим подходам. Многие методы тесно связаны с извлечением информации, интеллектуальным анализом данных.
Programmable controllers - представляет собой промышленный цифровой компьютер, который был прочным и адаптирован для управления производственными процессами, такими как сборочные линии или роботизированные устройства, или любой вид деятельности, требующий высокого контроля надежности и простоты программирования и диагностика неисправностей процесса.
Они были впервые разработаны в автомобильной промышленности для обеспечения гибких, прочных и легко программируемых контроллеров для замены жестких реле, таймеров и секвенсоров. С тех пор они широко используются в качестве высокопроизводительных контроллеров автоматизации, предназначенных для суровых условий эксплуатации. ПЛК является примером «жесткой» системы реального времени, поскольку выходные результаты должны производиться в ответ на входные условия в течение ограниченного времени, в противном случае произойдет непреднамеренная операция.
Когда цифровые компьютеры стали доступными, являясь универсальными программируемыми устройствами, они вскоре были применены для управления последовательной и комбинаторной логикой в промышленных процессах. Однако на этих ранних компьютерах требовались специализированные программисты и строгий контроль окружающей среды для температуры, чистоты и качества электроэнергии. Для решения этих задач ПЛК был разработан с несколькими ключевыми атрибутами.
19 июля-Лекции по Coordinate measuring techniques-methods of mechanical metrology
Coordinate measuring techniques-methods of mechanical metrology - - это устройство, которое измеряет геометрию физических объектов путем измерения дискретных точек на поверхности объекта с помощью зонда. Используются различные типы зондов, в том числе механический, оптический, лазерный и белый. В зависимости от машины, положение зонда может управляться вручную оператором или оно может управляться компьютером. Обычно указывается положение зонда, с точки зрения его перемещения из исходного положения в трехмерном декартовой системе координат (то есть, с осями XYZ). Помимо перемещения зонда вдоль осей X, Y и Z, многие машины также позволяют контролировать угол зонда, чтобы можно было измерить поверхности, которые в противном случае были бы недоступны.
Координирующие измерительные машины включают в себя три основных компонента:
- Основная структура, которая включает три оси движения. Материал, используемый для построения движущейся рамы, менялся с годами. Гранит и сталь использовались в ранних CMM. Сегодня все крупные производители CMM строят рамы из алюминиевого сплава или некоторых производных, а также используют керамику для повышения жесткости оси Z для сканирования приложений. Немногие строители CMM сегодня по-прежнему производят гранитную рамку CMM из-за требований рынка для улучшения динамики метрологии и увеличения тенденции устанавливать CMM за пределами лаборатории качества. Как правило, только малогабаритные строители CMM и отечественные производители в Китае и Индии по-прежнему производят гранитный CMM из-за низкого технологического подхода и легкого входа, чтобы стать строителем фреймов CMM. Возрастающая тенденция к сканированию также требует, чтобы ось CMM Z была более жесткой и были введены новые материалы, такие как керамика и карбид кремния.
- Зондовая система
- Система сбора и восстановления данных - обычно включает в себя контроллер машины, настольный компьютер и прикладное программное обеспечение.
Две основные цели заключаются в следующем. Во-первых, цель состоит в том, чтобы разработать надежный и точный метод измерения угла для сложных
геометрические объекты с использованием 3D CMM. Вторая цель связана с
метрологическая характеристика детекторов Si-SPAD. Задачи, которые необходимо решить следующие:
- Разработка метода измерения углов и оценки неопределенности
для сложных геометрических объектов с помощью 3D-координатного измерения
Машина (CMM)
- Разработка высокоточного метода для характеристики кремния
Одиночные фотонные лазерные диоды (Si-SPAD), используемые для визуализации
цели, которые состоят из:
а. Методология исследования однородности квантового обнаружения
Извещатели Si-SPAD
б. Достижение более низкой неопределенности в определении обнаружения
эффективность детекторов Si-SPAD, используемых для целей визуализации.
20 юля - Защита перед профессором Яцек Цеслик. Выдача сертификатов.
2. Исследования по теме диссертации
Термин «устойчивость» не имеет математически строгого содержания. Его уточняют, как правило, за счет конкретизации и сужения области его приложения. Используют разные определения для различных типов устойчивости движения систем устойчивость по Ляпунову, Андронову – Понтрягину, Лагранжу, Пуассону. Большая часть научных исследований посвящена разработке теории устойчивости динамических систем.
В современной науке область применения термина «устойчивость» расширилась по сравнению с классической теорией устойчивости динамических систем. Так, в теоретической информатике введено понятие «устойчивость вычислительного процесса», а в области телекоммуникационных систем — «устойчивость функционирования», и еще есть информационная устойчивость.
Широкое использование информационных технологий и автоматизированных систем управления практически во всех сферах жизнедеятельности общества, включая управление сложными системами в критических ситуациях, определяет высокую значимость проблемы синтеза устойчивых автоматизированных систем управления (АСУ). В настоящее время, когда автоматизированные системы являются основным звеном системы управления государственными органами, финансовыми, коммерческими и промышленными организациями, задача обеспечения надежности функционирования таких АСУ переходит в разряд стратегических задач управления на государственном уровне. Поскольку основным объектом обработки, передачи и хранения в них является информация, то проблема защищенности информационных ресурсов в автоматизированных системах вышла на первое место в круге задач, связанных с развитием инфрастуктуры современного общества.
Нарушение конфиденциальности или целостности информации в автоматизированных системах управления происходит в результате несанкционированного доступа к информации (НСД). Термином НСД принято обозначать какие-либо действия, направленные на получение информации с нарушением правил, соглашений и приоритетов, установленных в рамках данной системы.
Для таких автоматизированных систем как, например, автоматизированные системы управления войсками, АСУ оружием, очевидна важность сохранения секретности и целостности информации.
Основным свойством автоматизированных систем, позволяющим осуществлять коммуникации, является открытость. Следствием открытости и распределенности ресурсов АСУ является возможность подключения разнородных компонентов, отличающихся как аппаратно, так и программно.
Комплексный подход к проблеме построения информационно защищенных АСУ подразумевает согласованное применение ряда механизмов обеспечения информационно-устойчивого функционирования АСУ.
Информационная устойчивость - способность системы обеспечить заданный уровень качества информации в условиях случайного или преднамеренного воздействия. Обеспечение информационной устойчивости достигается применением стойких алгоритмов специального преобразования информации. То есть предполагается разработать методы повышения устойчивости алгоритмов защиты информации в АСУ в условиях воздействия дестабилизирующих факторов.
Дестабилизирующий фактор – явление или событие, следствием наступления которого может быть нарушение конфиденциальности, целостности или доступности информационных ресурсов, нарушению работоспособности сети или ее элементов.
Важность критических систем подчеркивается рядом масштабных изменений в программной инженерии. Наиболее существенные изменения можно охарактеризовать следующим образом:
повсеместность программного обеспечения – программное обеспечение все большего объема устанавливается в бытовых устройствах, и сбои этого программного обеспечения напрямую затрагивают жизнь обычных людей;
критичность программного обеспечения – программное обеспечение все чаще становится критичным, даже если оно не является сложным;
запутанность – зависимости между компонентами программного обеспечения усложняются, и большая часть программного обеспечения, используемого в приложениях реального мира, переплетается с программным обеспечением сторонних производителей;
возрастающая скорость эволюции
В исследовательских проектах предлагаются средства автоматизации анализа работы программ — информация о событиях в программном обеспечении посылается автоматическим анализаторам, которые интерпретируют, диагностируют и прогнозируют проблемы. На сегодняшний день ни в одном проекте не реализовано какое-либо средство полного мониторинга, которое производило бы сбор информации о событиях, ее многомодельную интерпретацию и формирование руководства для совершенствования системы. То есть предполагается создать механизм оценки и обеспечения устойчивости информационной безопасности АСУ КС, связанный с противодействием «человеческому фактору» по всему перечню возможных направлений: защита от ввода ошибочной информации, выявление ошибок и «чистка» базы данных, снижение влияния негативных факторов на человека - оператора при вводе данных обстановки.
- Фотоотчет


Ознакомительная экскурсия по лабораториям университета


Выполнение лабораторных работ


Выполнение лабораторных работ


Выполнение лабораторных работ

Совместное фото с профессором H. Nieciag в лаборатории машинного обучения
Заключение
Занятия по данным направлениям проходили в AGH University of science and technology, факультета инженерии под руководством профессора Яцека Цеслика. Курс направлен на разработку программ для автоматизации последовательных промышленных процессоров, охватывающий как параллельный, так и иерархический контроль. Было изучено соединение Machine learning. Programmable controllers, пульты и других оборудовании между собой по протоколу Modbus / TCP. Modbus — открытый коммуникационный тротокол, основанный на архитектуре ведущий-ведомый (master-slave).
В результаты данной стажировке были получены следующие умения и знания:
‒ Знание языка программирования Scratch на среднем уровне.
‒ Начальный навык работы с микроконтроллерами на примере Arduino.
‒ Базовые знания в области профессиональной разработки — программист, схемотехник, конструктор или технический дизайнер.
‒ Знание программы 3ds Max..
‒ Навык работы с контроллерами.
‒ Опыт работы с роботизированными платформами.
По итогам стажировки получены сертификаты о полном прохождении.
Список литературы
1. ARDEN Arden: What Can Be ?automated? – Computer Science & Engineering Research Study (cloth); Машиностроение - Москва, 2012. - 273 c.
2. Arthur Gray A Chapter in the Early Life of Shakespeare: Polesworth in Arden (Cambridge Library Collection - Literary Studies); РГГУ - Москва, 2013. - 156 c.
3. B ARTMAN Artmann: The Concept Of ?number? – From Quaternion S To Monads & Topological Fields; Огни - Москва, 2014. - 260 c.
4. Maik Schmidt Arduino; Мир - Москва, 2011. - 275 c.
5. Michael Margolis Arduino Cookbook; Гостехиздат - Москва, 2011. - 648 c.
6. RA ARTINO Artino ?contest Problem? Book 4 – Annual High Scho Ol Math Examinations 1973–1982 (pr Only); Машиностроение - Москва, 2012. - 198 c.
7. William Shakespeare As You Like It (Arden Shakespeare: Third Series); Гостехиздат - Москва, 2012. - 449 c.
8. Pinna A., Ruttenberg W. Distributed Ledger Technologies in Securities Post-Trading Revolution or Evolution? // ECB Occasional Paper. – 2016. – №172. – С. 1-35.
9. Kakavand H., Kost De Sevres N. The Blockchain Revolution: An Analysis of Regulation and Technology Related to Distributed Ledger Technologies. – 2016. – C. 1-27.
10. Dhillon V.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|