- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Продолжение темы: «Электропривод реверсивных прокатных станов»
Продолжение темы: «Электропривод реверсивных прокатных станов»
 Рабочая скорость привода клети стана задаётся эталонным напряжением UЗС, которое формируется и устанавливается сельсинным командоаппаратом. Это напряжение поступает на задатчик интенсивности и далее в системы управления приводом клетей. На входе каждой системы установлен блок коррекции скорости клети в соответствии с выбранным режимом обжатий.
Рабочая скорость привода клети стана задаётся эталонным напряжением UЗС, которое формируется и устанавливается сельсинным командоаппаратом. Это напряжение поступает на задатчик интенсивности и далее в системы управления приводом клетей. На входе каждой системы установлен блок коррекции скорости клети в соответствии с выбранным режимом обжатий.
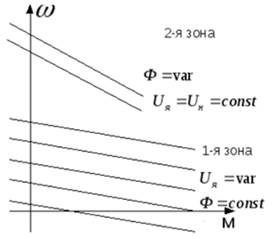
Данная схема управления приводом валков обеспечивает 2-хзонное регулирование параметров:
1-я зона (от 0 до ωН ) - регулируется напряжение на якоре двигателя с помощью СИФУ В и СИФУ Н.
2-я зона (от ωН до ωmax) - регулируется магнитный поток с помощью СУВ (система управления возбуждением).
Работу двигателя М контролируют: датчик скорости ДС,датчик напряженияДН, датчик тока ДТ, которые воздействуют на соответствующие регуляторы:РС (регулятор скорости),РТ(регулятор тока), РМ (регулятор момента), РН(регулятор напряжения).
В случае рассогласования результирующего напряжения обратной связи с заданным система импульсно-фазового управления СИФУ подаёт импульснатиристорный преобразователь ТП-В(или ТП-Н), который изменяет величину напряжения на обмотке возбуждения генератора LG, это в свою очередь приводит к тому, что напряжение на зажимах двигателя М изменяется, а значит и скорость двигателя также изменяется.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|