- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Электрическая схема крана КБ-674, работа схемы грузовой тележки
§ 62. Электрическая схема крана КБ-674, работа схемы грузовой тележки
Для привода механизма передвижения крана применены асинхронные электродвигатели с фазным ротором, управляемые магнитным контроллером. В приводе монтажной лебедки и лебедки контргруза использованы асинхронные электродвигатели с короткозамкнутым ротором, управляемые с помощью кнопок. В приводе грузовой лебедки применен двигатель постоянного тока с тиристорным преобразователем, принцип работы которого рассмотрен в § 50 (данный параграф удален). Для привода механизма поворота и грузовой тележки на кране используются двигатели постоянного тока, питаемые от кремниевых выпрямителей. Регулирование частоты вращения в этих приводах осуществляется изменением сопротивления реостата в якорной цепи.
Принципиальная электрическая схема привода грузовой тележки крана показана на рис. 123 и 124.
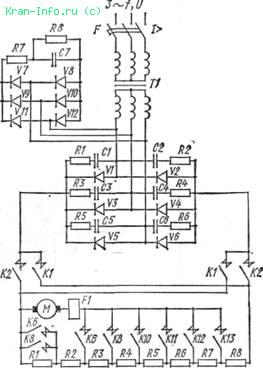
Рис. 123. Принципиальная электрическая схема силовой цепи электропривода грузовой тележки крана КБ-674
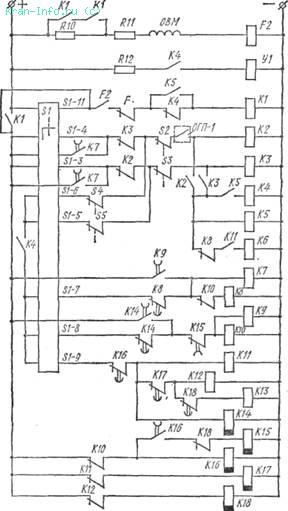
Рис. 124. Принципиальная электрическая схема (цепи управления) электропривода грузовой тележки крана КБ-674
Двигатель и цепь управления работают на постоянном токе, получаемом от выпрямительных блоков. Двигатель управляется магнитным контроллером с помощью командоконтроллера S1. Реверсирование двигателя осуществляется с помощью контакторов К1 и К2 в цепи якоря. Последовательность замыкания контактов командоконтроллера приведена в табл. 19.
При переводе рукоятки командоконтроллера из первого положения в последующие включаются контакторы Кб, KS, КЮ, KU, которые закорачивают ступени реостата в цепи якоря двигателя. Контакторы К12 и К13 включаются автоматически под контролем реле времени К17, К18 после установки рукоятки командоконтроллера в четвертое положение.
Таблица 19. Замыкания контактов командоконтроллера привода грузовой тележки крана КБ-674 (к рис. 124)
| Положения рукоятки | |||||||||
| Контакт | Назад | Вперед | |||||||
| S1-3 | Х | Х | Х | Х | |||||
| S1-4 | Х | Х | Х | Х | |||||
| S1-5 | Х | Х | Х | Х | |||||
| S1-6 | Х | Х | Х | Х | |||||
| S1-7 | Х | Х | Х | Х | Х | Х | |||
| S1-8 | Х | Х | Х | Х | |||||
| S1-9 | Х | Х | |||||||
| S1-11 | Х | ||||||||
X — контакт замкнут.
При подходе грузовой тележки на расстояние 10 м к башне крана или на расстояние 8,5 м к головной части стрелы электропривод автоматически переходит на пониженную частоту вращения, так как срабатывают конечные выключатели S4, 55 и в цепь якоря двигателя вводится полное сопротивление реостата.
По такому же принципу производится управление приводом механизма поворота крана, но в первом положении рукоятки включаются только тормозные электромагниты, растормаживая механизм, а двигатели выключены. Во втором положении механизм работает на малой частоте вращения, в следующих положениях частота возрастает, достигая максимального значения в последнем положении рукоятки.
При переводе рукоятки командоконтроллера из рабочего положения в нулевое происходит динамическое торможение привода с последующим наложением тормозов.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|