- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Согласование характеристик сигнала и канала связи
6.3. Согласование характеристик сигнала и канала связи
Для передачи сигнала по каналу важно согласовать 3 параметра.
| Сигнал | Канал |
| 1. Время существования сигнала tс | 1. Время, в течение которого доступен канал tк |
| 2. Спектр частот, занимаемый сигналом Fс | 2. полоса пропускания канала Fк |
3. Мощность сигнала Pс, уровень помех в канале Рз.
 – превышение сигнала над помехами – превышение сигнала над помехами
| 3. Динамический диапазон канала
|
Принято характеризовать сигнал объемом сигнала Vс = tсFс Lс, а канал – объемом канала Vк = tкFкLк. Для того чтобы передавать сигнал по каналу нужно одновременное выполнение след условий: Vк >= Vc, tк >= tc, Fк >= Fc, Lк >= Lc. Бывает так что Vк >= Vc, но одно из приведенных условий не выполняется. В этой ситуации возможны преобразования сигнала, которые позволяют подогнать сигнал под канал. Например
Разделение линий связи
(мультиплексирование)
8.1. Постановка задачи
Имеется n источников информации (датчиков, абонентов), сигналы от которых необходимо передать n приемникам информации. Самое простое решение: использовать для каждого источника сигнала свою линию связи. Это так называемое пространственное разделение, когда каждому каналу отводится индивидуальная линия связи. На рис. 8.1 приведена такая система.
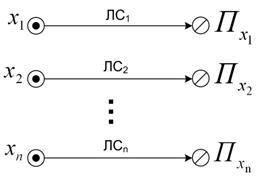
Рис. 8.1. Многоканальная система с пространственным разделением:
X1–Хn – источник сигнала (датчик, абонент) канала;
Пx1–Пхn – приемники сигналов каналов; ЛС1–ЛСn – линии связи каналов
Такая схема имеет смысл, если возможности линии связи по полосе пропускания, времени использования, динамическому диапазону используются полностью. Однако чаще всего возможности линии связи для одного источника информации используются не полностью. Для экономного использования линий связи необходимо организовать возможность использования одной линии связи многими пользователями. Для этого необходимо, чтобы сигнал каждого источника, мог попасть к своему приемнику, передаваясь по одной линии связи. Такая процедура носит название разделения линий связи.Так как сигналы от разных источников передаются по одной линии связи, то многоканальную передачу называют также уплотнением (мультиплексированиием) линий связи.
Различают следующие методы разделения линий связи: частотное, временное, кодовое, дифференциальное, фазовое, по уровню, по форме, комбинированные. В связи с ограниченными возможностями по числу каналов у дифференциального, фазового, по уровню, по форме мы рассмотрим только фазовое разделение и разделение по форме, как наиболее распространенные.
8.2. Частотное разделение
При частотном разделении (FDMA – Frequency Division Multiple Access) для различных каналов отводятся непересекающиеся участки полос частот Δf1, Δf2, …, Δfn в полосе пропускания линии связи (рис. 8.2).

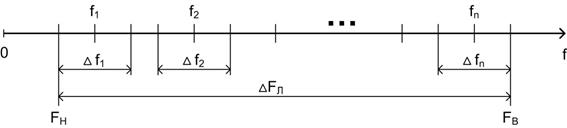
Рис. 8.2. Распределение каналов по шкале частот при частотном разделении
Спектры сигналов соответствующих каналов должны укладываться в пределы Δfk. Полоса пропускания линии связи ΔFл = Fв – Fн определяет количество возможных каналов. Для уменьшения паразитного влияния каналов друг на друга между полосами частот, отведенных каналу, оставляются незанятые полосы частот. На рис. 8.3 приведена структурная схема многоканальной системы с частотным разделением.
Низкочастотные сигналы Uk(t) от источников сигнала (датчиков) Xk модулируют по амплитуде или частоте высокочастотные сигналы с несущими частотами f1, f2, …, fn в модуляторах. Сигналы на выходе модуляторов имеют спектры Δf1, Δf2, …, Δfn, положение которых на шкале частот определяется несущими частотами f1, f2, …, fn, а ширина зависит от ширины спектра сигналов датчиков. Полосовые фильтры передающей части ограничивают полосы частот своих каналов. В смесителе все сигналы смешиваются и поступают в линию связи. На приемной стороне сигнал с линии связи поступает на полосовые фильтры, каждый из которых имеет полосу пропускания, равную полосе фильтра на передающей стороне. Сигнал с выхода фильтра демодулируется демодулятором. На выходе демодулятора получаем сигнал Uk, переданный с датчика. Сигнал Uk поступает приемнику.
Большим преимуществом систем с частотным разделением является возможность одновременной передачи сигналов, относящихся к разным каналам.
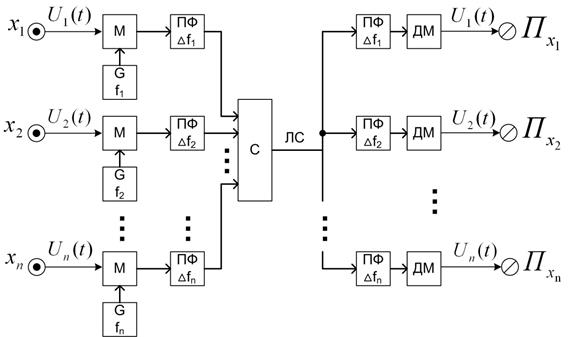
Рис. 8.3. Структурная схема многоканальной системы с частотным разделением: X1–Xn – источники сигналов; U1(t)–Un(t) – сигналы, которые необходимо передать по линии связи к соответствующим приемникам Пх1–Пхn; М – модуляторы; G – генераторы гармонических сигналов с частотами f1–fn; ЛС – линия связи;
ПФ – полосовые фильтры с полосами пропускания Δf1–Δfn; С – смеситель сигналов; ДМ – демодуляторы
К недостаткам относят:
1. Сравнительно большое взаимное влияние каналов из-за перекрытия спектров сигналов, не идеальности полосовых фильтров и наличие паразитных частотных составляющих вследствие перекрестной модуляции.
2. Неполное использование каждым пользователем всей полосы пропускания канала.
Такое разделение используется в стандартах NMT (Nordic Mobile Telephone) – стандарте Европы на мобильную аналоговую связь.
8.3. Временное разделение
При временном разделении (TDMA – Time Division Multiple Access – множественный доступ с временным разделением каналов) сигналы датчиков (источника сигнала) передаются только в отведенные для них непересекающиеся отрезки времени Δtk. На рис. 8.4 приведено распределение каналов во времени.
Отметим, что каждый канал получает доступ в линию связи через время ΔT.
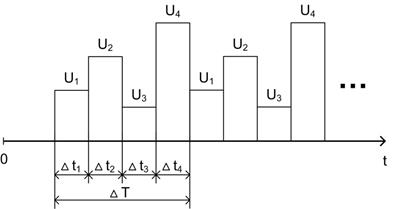
Рис. 8.4. Распределение каналов во времени
Структурная схема многоканальной системы с временным разделением приведена на рис. 8.5.
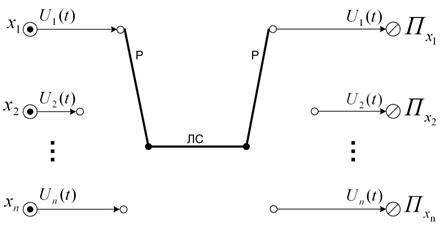
Рис. 8.5. Многоканальная система передачи информации с временным разделением: X1–Xn – источники сигналов; U1(t)–Un(t) – сигналы, которые необходимо передать по линии связи к соответствующим приемникам Пх1–Пхn; ЛС – линия связи; Р – распределитель
В данной системе распределение во времени источников информации осуществляется распределителем Р, который поочередно подключает источник и приемник к линии связи. Распределители на передающей и приемной стороне должны быть строго синхронизированы (т.е. работать с одинаковой скоростью) и синфазированы (работать без сдвига во времени).
Взаимное влияние каналов при временном разделении обычно незначительно, что позволяет строить системы с большим количеством каналов. Благодаря этому обстоятельству, а также простоте технических средств этот метод широко используется. Например, в стандарте GSM (Global System for Mobile Communication – глобальная система мобильной связи) для организации множественного доступа абонентов к базовой станции используется метод временного разделения.
8.4. Кодовое разделение
Основная идея кодового разделения линий связи (CDMA – Code Division Multiple Access) заключается в том, что в одной и той же полосе частот можно использовать сигналы, которые не влияют друг на друга. Для их получения подбирается система сигналов, свободных в точке приема от взаимных влияний друг на друга. На передающей стороне формируется и передается через линию связи широкополосный сигнал с распределенной энергией. На приемной стороне этот сигнал умножается на соответствующий сигнал из системы сигналов, использовавшихся на передающей стороне, и интегрируется. В результате, на приемной стороне выделяется сигнал соответствующего абонента (датчика).
Рассмотрим процесс передачи и приема сигналов в CDMA детальнее.
Сигналы отдельных каналов представляются в виде:
Uxk(t) = Uk(t) · gk(t),
где gk(t) – сигнал-носитель;
Uk(t) – сигнал соответствующего датчика.
Сигнал, поступающий в линию связи, представляется в виде
U(t ) =  .
.
Если gk(t) линейно независимы, они могут быть разделены линейными фильтрами. Такие многоканальные системы передачи носят название линейных. К линейным относятся, в частности, системы с частотным, временным, фазовым разделением и разделением по форме.
В качестве системы линейно независимых сигналов используются различные системы ортонормированных сигналов, для которых существует общий метод разделения, основанный на применении оператора корреляционной фильтрации к сигналу, поступающему из линии связи.
Рассмотрим процесс выделения на приемной стороне сигнала k-го источника.
Сигнал, принятый из линии связи, умножается на gk(t) и затем интегрируется:
U(t)·gk(t) = gk(t)· [  ·gi(t)].
·gi(t)].
После интегрирования получим
 · [ ·gi(t)] · dt ,
· [ ·gi(t)] · dt ,
где a, b – интервал времени, на котором система функций gi(t) ортонормированна.
Покажем, что в результате этих действий (умножения и интегрирования) получим на приемной стороне переданный сигнал от k-го источника:
· [ · gi(t)] · dt =
Внесем под знак суммы gk(t)
=  [ ·gi(t) ·gk(t)]·dt =
[ ·gi(t) ·gk(t)]·dt =
Поменяем местами порядок выполнения действий
=  · gi(t) ·gk(t) · dt. (8.1)
· gi(t) ·gk(t) · dt. (8.1)
Для продолжения преобразований воспользуемся формулой интегрирования по частям:
òp ·dv = pv – òv · dp .
Для этого интеграл  · gi(t) · gk(t) · dt представим в виде
· gi(t) · gk(t) · dt представим в виде
 · d
· d  =
=
(дифференциал от интеграла равен под интегральной функции)
= Ui(t)·  ·gk(t) ·dt –
·gk(t) ·dt –  { · gk(t) ·dt} ·d [Ui(t)]. (8.2)
{ · gk(t) ·dt} ·d [Ui(t)]. (8.2)
Определим значение выражения (8.2) для различных случаев.
Для i ≠ k по свойству ортогональности функций · gk(t) ·dt = 0, поэтому из выражения (8.2) получим
Ui(t) ·0 –  ·d [Ui(t)] = 0 – 0 = 0.
·d [Ui(t)] = 0 – 0 = 0.
Для i = k по свойству нормированности функций  , поэтому из выражения (8.2) получим
, поэтому из выражения (8.2) получим
Uk(t) · 1 –  = Uk(t) · 1 – Uk(t)│
= Uk(t) · 1 – Uk(t)│  =
=
= Uk(t) – [Uk(b) –Uk(a)].
Подставив вычисленное значение интеграла в выражение (8.1) получим
 · [ · gi(t)] · dt = Uk(t) – [Uk(b) – Uk(a)]. (8.3)
· [ · gi(t)] · dt = Uk(t) – [Uk(b) – Uk(a)]. (8.3)
В полученном результате Uk(a) – значение сигнала k-го источника сигнала в начальный момент времени, Uk(b) – значение сигнала k-го источника сигнала в конце передачи, т.е. это некоторая постоянная величина, на которую смещен сигнал по оси ординат.
Таким образом, на выходе интегратора получим переданный сигнал, только смещенный по оси ординат. Технически смещение можно легко устранить, например, пропустив сигнал (8.3) через конденсатор.
Следовательно, умножив сигнал, принятый из линии связи, на соответствующий каналу сигнал ортонормированной системы сигналов и затем, проинтегрировав произведение, получим переданный сигнал.
Структурная схема многоканальной системы с кодовым разделением приведена на рис. 8.6.
Эффективность кодового метода разделения состоит в том, что он позволяет значительно ослабить влияние перекрестных помех.
В реализациях локальных систем автоматического управления могут использоваться следующие схемы разделения.
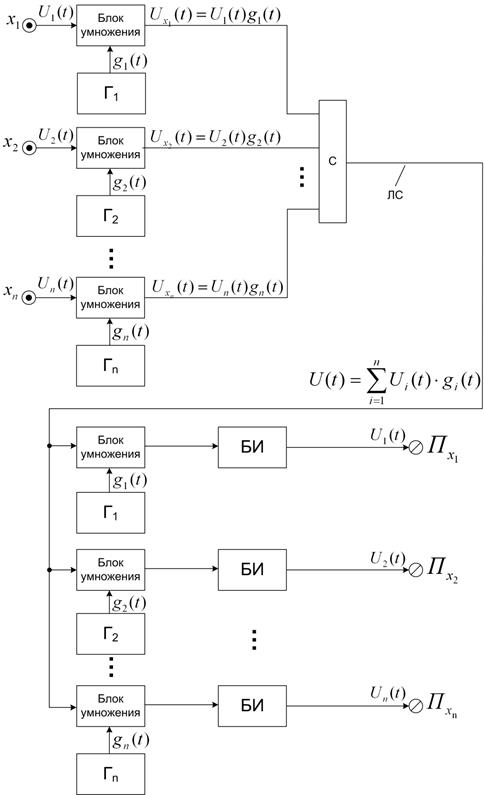
Рис. 8.6. Структурная схема многоканальной системы с кодовым разделением: X1–Xn – источники сигналов; Г1–Гn – генераторы сигналов ортонормированный системы сигналов g1–gn; С – сумматор; БИ – блоки интегрирования; Пх1–Пхn – приемники сигналов
8.5. Фазовое разделение
Фазовое разделение применяют в двухканальной системе передачи сигналов двух датчиков в системах сбора данных. Структурная схема двухканальной системы с фазовым разделением приведена на рис. 8.7.
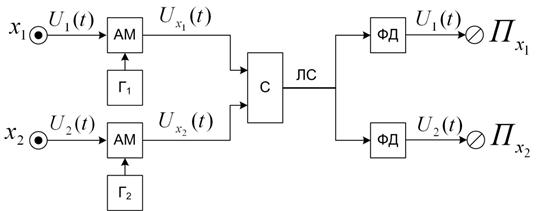
Рис. 8.7. Двухканальная система с фазовым разделением
Сигналы датчиков X1 и Х2 модулируют амплитуду синусоидальных носителей, различающихся по фазе на 90°. После модуляторов сигналы Ux1(t) и Ux2(t) имеют амплитуды, определяемые модулирующими сигналами с датчиков, а фазы соответственно φ1 и φ2 =φ1 +  :
:
Ux1(t) = U1(t) · sin ω0t;
Ux2(t) = U2(t) · sin(ω0t + ) = U2(t) · cosω0t.
На приемной стороне фазовые детекторы выделяют соответствующие модулирующие функции U1(t) и U2(t).
8.6. Разделение по форме
Для разделения сигналов, различающихся формой, используются операции, наиболее чувствительные к изменению формы, – обычно дифференцирование, интегрирование и вычитание. На рис. 8.8 приведены временные диаграммы сигналов двухканальной системы с разделением по форме.
В линию связи поступает сумма U(t) = U1(t) + U2(t).
Процесс разделения имеет целью выделение информационных параметров U1(t) и U2(t). Выделение U2(t) осуществляется путем дифференцирования функции U(t). U1(t) получается путем вычитания U2(t) из U(t).
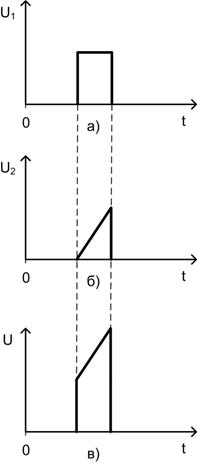
Рис. 8.8. Временные диаграммы сигналов
двухканальной системы с разделением по форме:
а – сигнал от источника 1; б – сигнал от источника 2; в – сигнал в линии связи
Отметим, что данный метод, как и разделение по уровню, дифференциальное разделение с использованием телефонной линии имеют ограниченное применение (только для подключения датчиков).
8.7. Комбинированные методы разделения
Одновременное использование нескольких методов разделения позволяет увеличить число каналов и уменьшить их взаимное влияние. Например, разделение по форме в сочетании с частотным или временным разделением удваивает общее количество каналов. Применяются комбинации частотного с временным (например, в GSM кроме временного разделения используется и частотное разделение, а именно: NB TDMA), кодового с частотным, кодового и временного методов разделения и др.
Задания
1. Какая минимальная полоса частот требуется для организации 20 каналов с шириной полосы частот 15 кГц, если используется частотное разделение? С помощью какой процедуры можно осуществить эту операцию?
2. Вам доступна линия связи с полосой пропускания от 2,4 ГГц до 2,7 ГГц. Какое максимальное количество каналов, шириной 15 кГц, можно обеспечить на данной линии связи при частотном разделении? Как реализовать технически?
3. Вам доступен канал, имеющей полосу пропускания 0 ÷ 16 кГц в течение 15 c, нужно передавать сигнал, занимающий полосу частот от 0 до 4 кГц, длительностью 1 мин. Можно ли организовать неискаженную передачу по такой линии связи указанного сигнала, если можно то каким образом? Приведите соответствующую теорему.
4. Вам доступен канал, имеющей полосу пропускания 0 ÷ 4 кГц в течение 1 мин, нужно передавать сигнал, занимающий полосу частот от 0 до 16 кГц, длительностью 15 сек. Можно ли организовать неискаженную передачу по такой линии связи указанного сигнала, если можно то каким образом? Приведите соответствующую теорему о преобразования сигнала.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|