- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Исходные данные. Задача 1
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Электропривода и автоматизации промышленных установок»
РАСЧЁТНО-ГРАФИЧСКАЯ РАБОТА
по предмету:ТЕОРИЯ СПЕЦИАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ
ВариаНТ 26
Выполнил:
Студент группы ЭМА-72
Журавлев Алексей Аркадьевич
Проверила:
к.т.н., доц. Кучер Екатерина Сергеевна
Новосибирск 2020г.
Исходные данные
Таблица 1 — Параметров объекта управления

| 
| 
| 
| 
| 
|
| 2.2 | 1.5 | 2.0 |
Структурная схема №2 объекта управления изображена на рисунке 1:
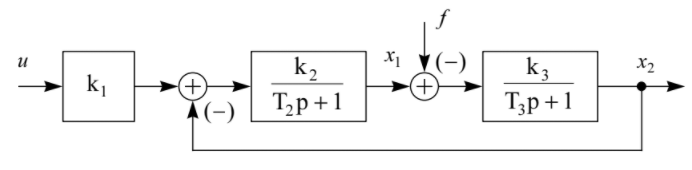
Рисунок 1 — Структурная схема объекта управления
Задача 1
Представить математическую модель объекта управления, заданную структурной схемой, в векторно-матричной форме. Определить установившиеся значения координат состояния объекта при подаче единичных управляющего и возмущающего воздействий.
Решение:
Представим математическое описание объекта управления, заданное структурной схемой, в виде операторных уравнений:
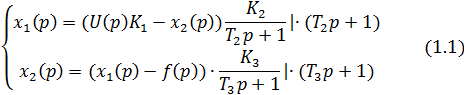
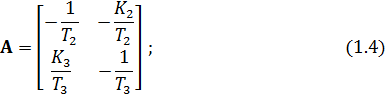
Перейдём к дифференциальной форме записи:
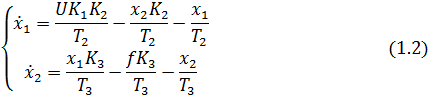
Векторно-матричную модель заданного объекта представляется в форме [1. cт.13]:

где  двумерный вектор координат состояния;
двумерный вектор координат состояния;  скалярные управляющие и возмущающие воздействия соответственно;
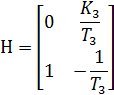
скалярные управляющие и возмущающие воздействия соответственно;  собственная матрица объекта управления:
собственная матрица объекта управления:
 матрица управлений:
матрица управлений:
 матрица возмущений, характеризующая вхождение сигнального возмущающего воздействия
матрица возмущений, характеризующая вхождение сигнального возмущающего воздействия  в структуру объекта управления :
в структуру объекта управления :
Определим установившиеся значения координат состояния объекта управления при подаче управляющего и возмущающего воздействий путём векторно-матричных преобразований [1]. Модель (1.3) с использованием оператора Лапласа примет вид:

Из уравнения  выражаем
выражаем  :
:

Разделив левую и правую части уравнения (1.6) на u, при  получим матричную передаточную функцию ОУ по управлению [1]:
получим матричную передаточную функцию ОУ по управлению [1]:

Аналогично при  получаем матричную передаточную функцию ОУ по возмущению:
получаем матричную передаточную функцию ОУ по возмущению:

Установившиеся значения координат состояния объекта при подаче единичного управляющего воздействия найдём на основании уравнения (1.7) при  принимая
принимая 

По аналогии определяются установившиеся значения объекта управления при подаче единичного возмущающего воздействия (  ):
):

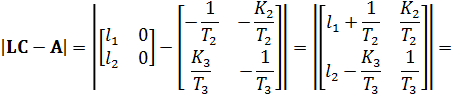
где  обратная матрица, которая определяется выражением:
обратная матрица, которая определяется выражением:

Найдём 

Подставляя значения всех параметров, получаем:

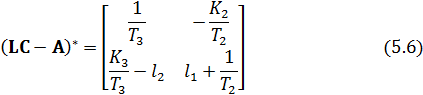
Получим присоединённую матрицу  из исходной путём замены всех элементов их алгебраическими дополнениями с последующим транспонированием [1]:
из исходной путём замены всех элементов их алгебраическими дополнениями с последующим транспонированием [1]:
тогда


С учётом уравнений  ,
,  ,
,  и
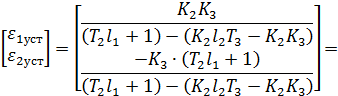
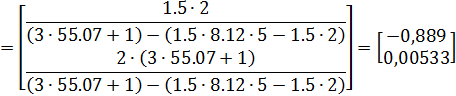
и  установившиеся значения координат состояния при подаче единичного сигнала управления:
установившиеся значения координат состояния при подаче единичного сигнала управления:

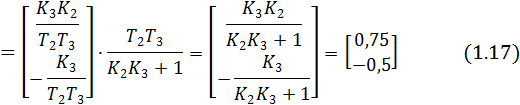
при подаче единичного сигнала возмущения:

|
| t,c |

|

|

|
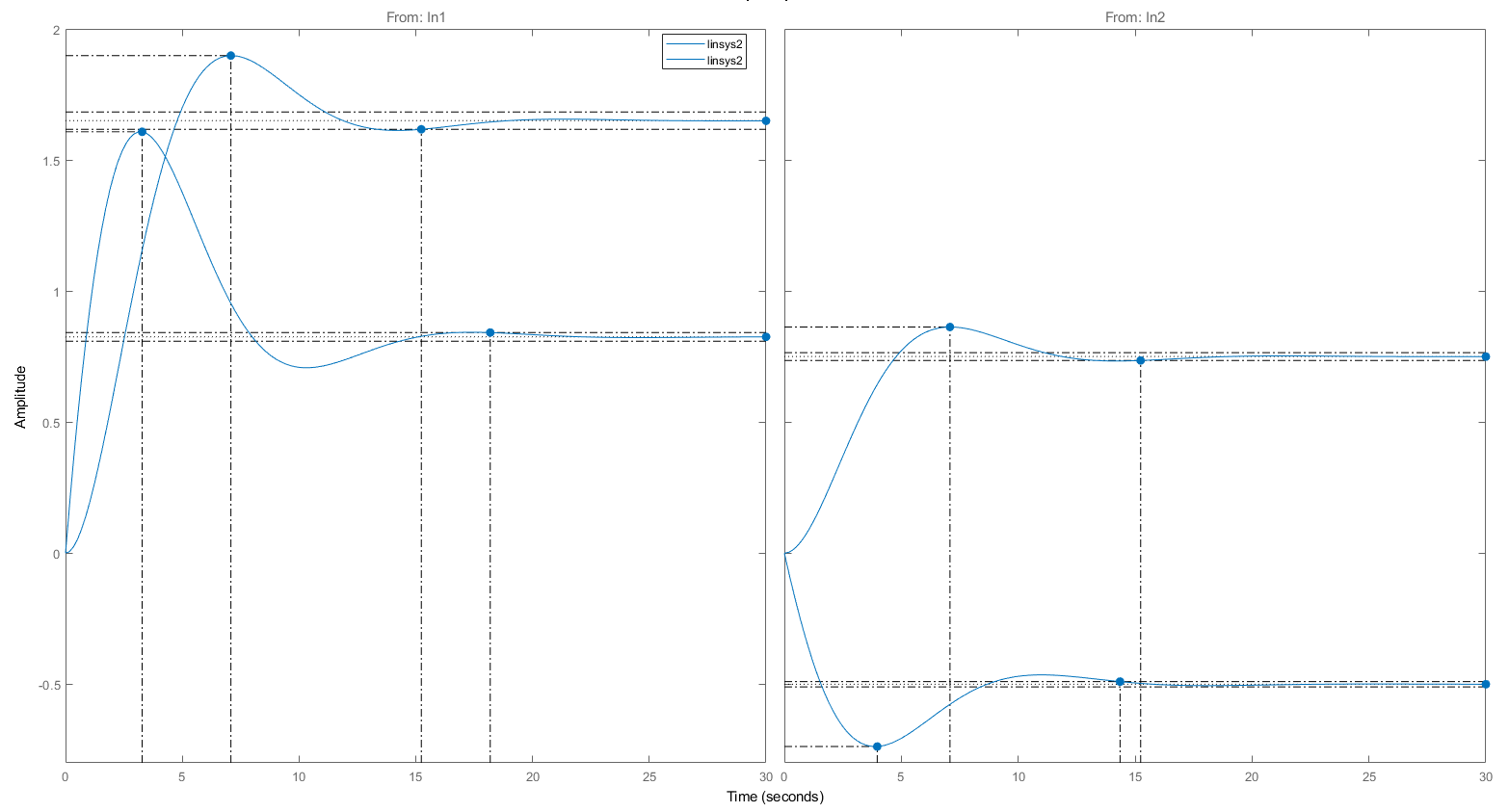
Рисунок 2 — Графики переходных процессов координат состояния объекта управления по управляющему и возмущающему воздействиям
|
|
| t,c |
|
|
|
|
|
|
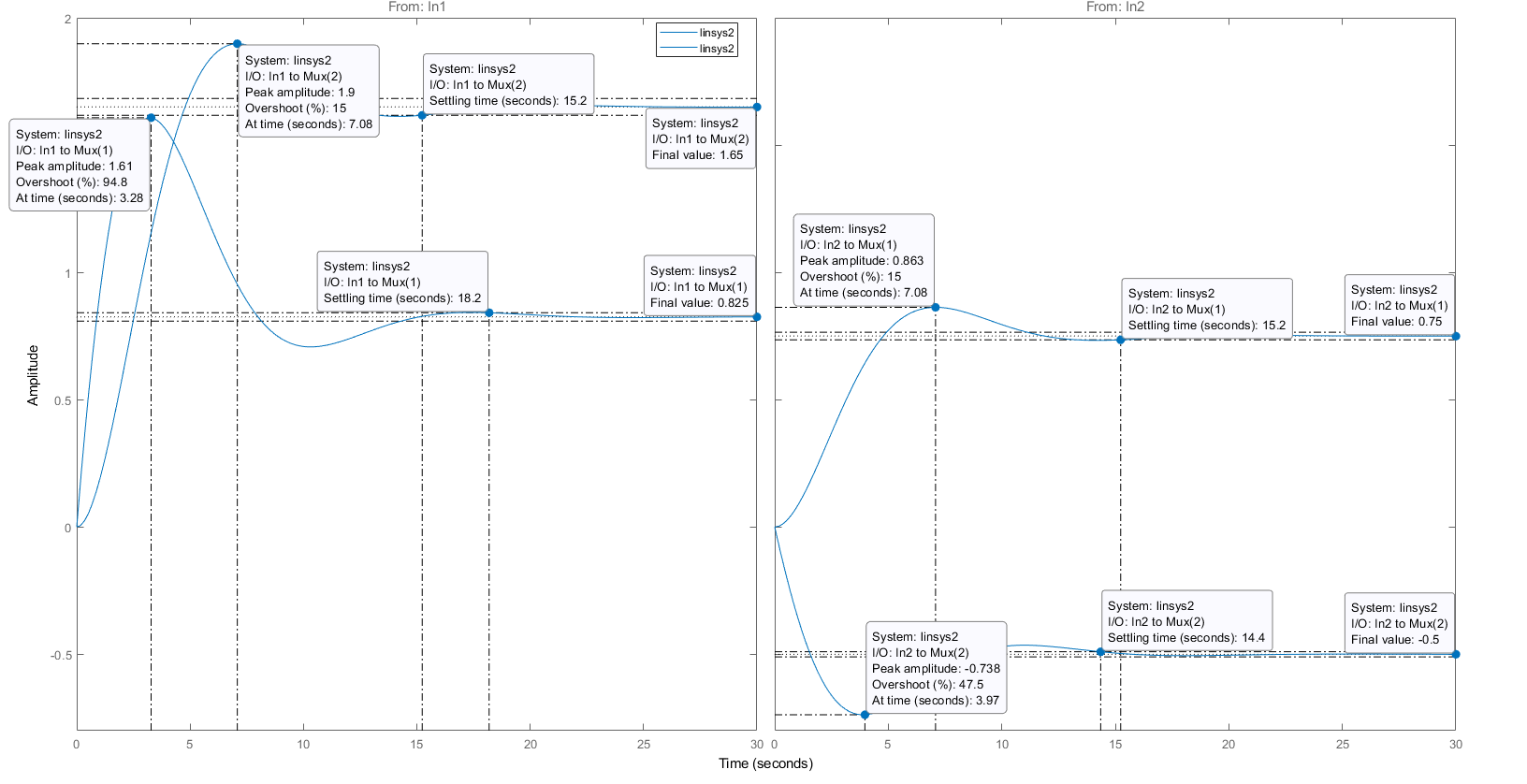
Рисунок 3 — Показатели качества объекта управления
Определим прямые показатели качества переходного процесса объекта управления и установившиеся значения  и
и  , результаты сведены в таблицу 2.
, результаты сведены в таблицу 2.
Таблица 2 – Прямые показатели качества переходного процесса объекта управления и установившиеся значения координат  и
и  при единичном возмущащем и управляющем воздействиях
при единичном возмущащем и управляющем воздействиях
| Показатель | Управляющее воздействие | Возмущающее воздействие | ||
|
|
|
|
| |
| Перерегулирование, % | 94,8 | 47,5 | ||
| Время регулирования, сек | 18,2 | 15,2 | 15,2 | 14,4 |
| Количество колебаний, шт | ||||
| Установившиеся значение, о.е. | 0,825 | 1,65 | 0,75 | -0,5 |
Вывод:
В результате моделирования были получены переходные характеристики координат состояния объекта управления по управляющему и возмущающему воздействиям (Рис.3). Установившиеся значения координат состояния объекта управления, полученные по переходным характеристикам, были проверены аналитически. В следствии проверки можно увидеть, что рассчитанные и смоделированные значения координат состояния объекта управления полностью совпадают. В соответствии с этим можно говорить о правильности расчета.
Задача 2
Синтезировать алгоритм модального управления заданным объектом при полных измерениях и настройке системы на желаемое распределение корней характеристического полинома, соответствующее стандартной линейной форме Бесселя. Среднегеометрический корень характеристического полинома принять равным [1, ст. 63] 

Решение:
Перед началом синтеза модального регулятора необходимо произвести проверку условия управляемости. Для заданного объекта матрица управляемости Yимеет вид [1, ст. 44]:

Определим матрицу AB:
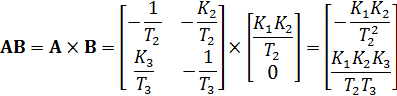
Тогда:
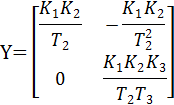
Определитель матрицы Yравен:

Из последнего неравенства видно, что ранг матрицы управляемости Yравен порядку объекта управления:

т.е. объект является полностью управляемым.
В задачу синтеза закона модального управления входит нахождение коэффициентов передачи каналов отрицательных обратных связей по координатам состояния  , преднамеренное введение в систему которых обеспечивает желаемое распределение корней характеристического уравнения замкнутой системы.
, преднамеренное введение в систему которых обеспечивает желаемое распределение корней характеристического уравнения замкнутой системы.
Скалярное управляющее воздействие uформируется на основании следующего закона управления [1, ст. 50]:

где  – скалярное задающее воздействие.
– скалярное задающее воздействие.
Структурная схема синтезированной системы модального управления (СМУ) изображена на рисунке 2:
| α1 |
f


|

|


|

| α2 |
Рисунок 4 — Структурная схема объекта управления с модальным корректором
Подстановкаалгоритма (2.4) в математическую модель (1.3) изменяет её вид:

Переходя к операторной форме, имеем:

В результате собственные динамические свойства замкнутой системы модального управления теперь описываются определителем  который является её характеристическим полиномом:
который является её характеристическим полиномом:



Подставляя значения всех параметров, получаем:


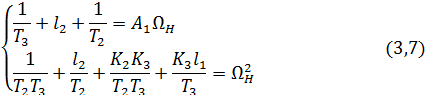
Приравнивая полученный характеристический полином к стандартному виду:

получаем систему алгебраических уравнений:

из которой найдем элементы матрицы  , выбирая среднегеометрический корень равным
, выбирая среднегеометрический корень равным  , а также коэффициент формы
, а также коэффициент формы  . [1, табл. П1.4]
. [1, табл. П1.4]
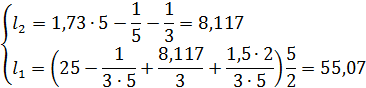
Из первого уравнения системы (2.9)

Согласно второму уравнению системы (2,9):



Установившиеся значения координат состояния при подаче единичных задающего и возмущающего воздействий определяются по формулам[1]:


Получим присоединённую матрицу  из исходной путём замены всех элементов их алгебраическими дополнениями с последующим транспонированием:
из исходной путём замены всех элементов их алгебраическими дополнениями с последующим транспонированием:

тогда:


С учётом уравнений (2.10) и (2.11) и последних соотношении установившиеся значения координат состояния при подаче единичного сигнала управления:

при подаче единичного сигнала возмущения:

|
|
|
|

|

|

|
| t,c |
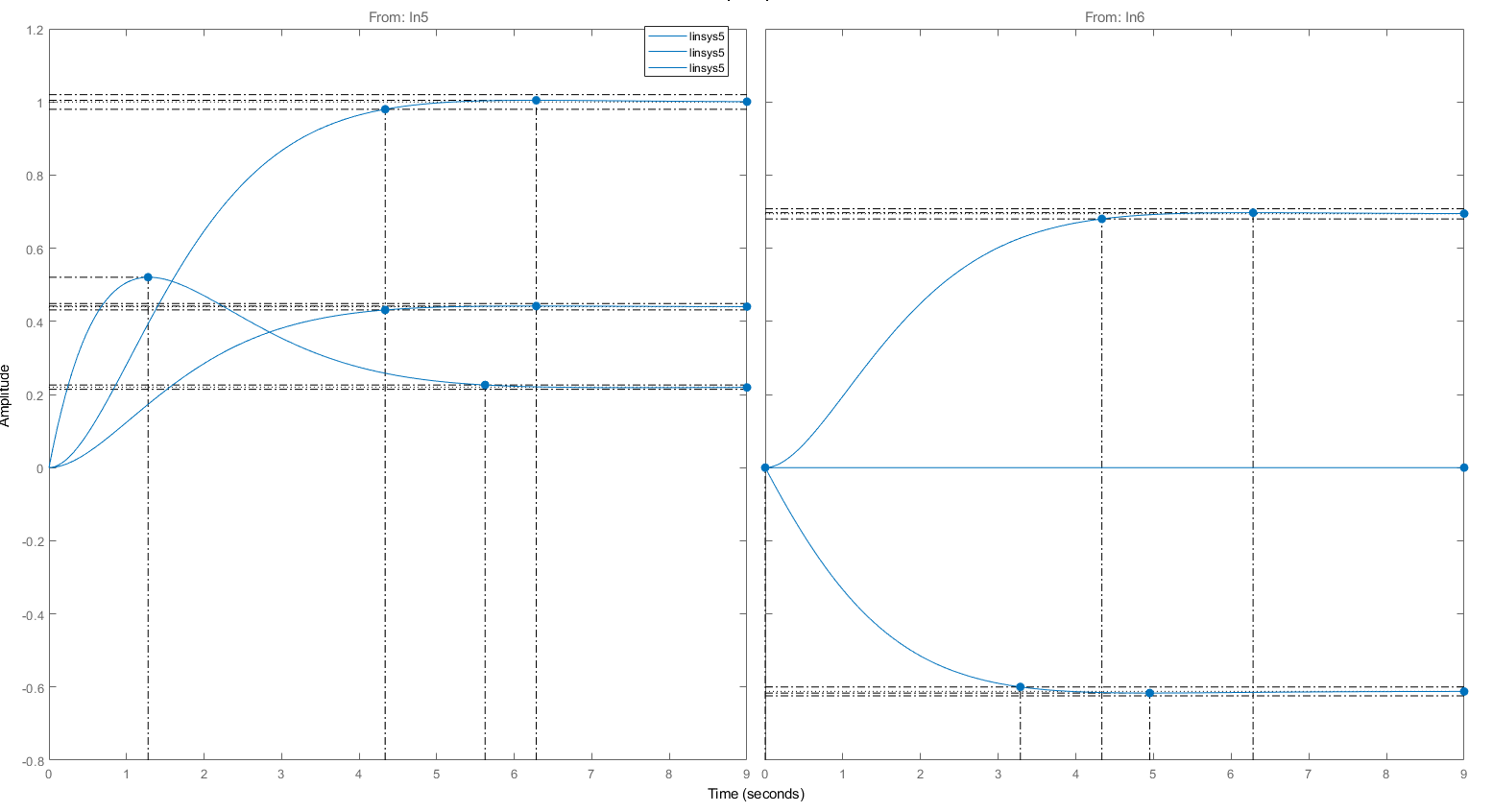
Рисунок 5 — Переходный процес системы с модальным регулятором при единичном задающем воздействии
|
|
|
|
|
|
|
|
|
|
| t,c |
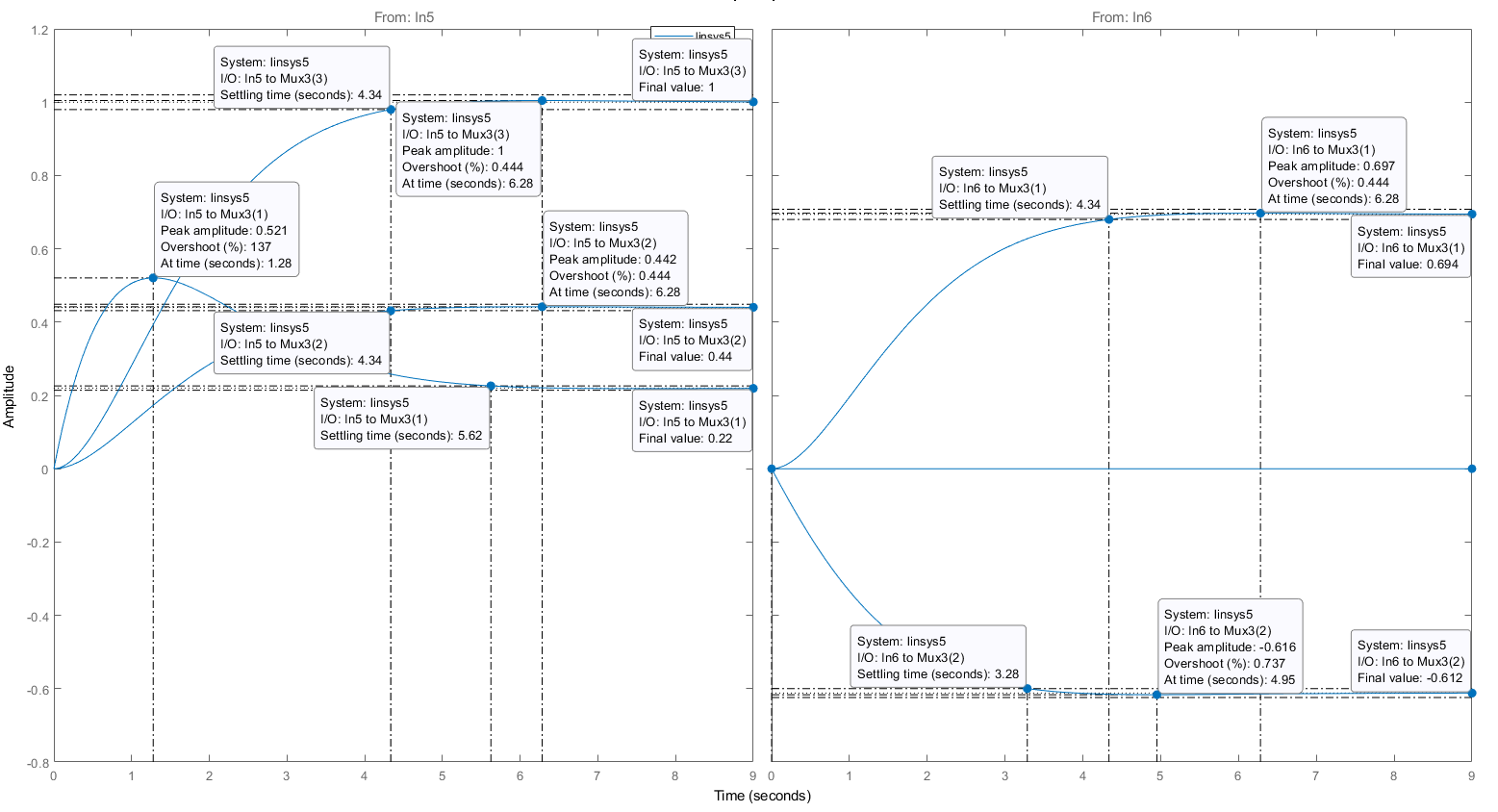
Рисунок 6 — Показатели качества системы с модальным регулятором при единичном управляющем и возмущающем воздействии
Определим прямые показатели качества переходного процесса системы с модальным регулятором и установившиеся значения  и
и  , результаты сведены в таблицу 3.
, результаты сведены в таблицу 3.
Таблица 3 – Прямые показатели качества переходного процесса системы с модальным регулятором и установившиеся значения  и при единичном возмущающем и управляющем воздействиях
и при единичном возмущающем и управляющем воздействиях
| Показатель | Управляющее воздействие | Возмущающее воздействие | Желаемый переходный процесс | ||
|
|
|
|
| 
| |
| Перерегулирование, % | 0,44 | 0,44 | 0,737 | 0,44 | |
| Время регулирования, сек | 5,62 | 4,34 | 4,34 | 3,28 | 4,34 |
| Количество колебаний, шт | |||||
| Установившиеся значение, о.е. | 0,22 | 0,44 | 0,694 | -612 | |
Рассчитаем погрешности настройки системы:


Вывод:
В ходе решения данной задачи был проведен синтез алгоритма модального управления заданным объектом при полных измерениях и настройке системы на желаемое распределение корней характеристического полинома, соответствующее стандартной линейной форме Бесселя. Рассчитаны установившиеся значения координат состояния при подаче единичных задающих и возмущающего воздействий. Сняты показатели качества СМУ, такие как величина перерегулирования равная 0,44% и время регулирования 4,34 с. для , данные показатели качества имеют небольшую погрешность с желаемой САУ, что говорит о большой точности проведенных настроек, но в системе присутствует статическая ошибка.
Задача 3
Синтезировать наблюдатель Люенбергера полного порядка с распределением корней характеристического полинома, соответствующим стандартной линейной формеБесселя, и среднегеометрическим корнем, равным 
В качестве измеряемой координаты вектора состояния принять  возмущающее воздействие считать неконтролируемым.
возмущающее воздействие считать неконтролируемым.
Решение:
Динамическая подсистема для оценивания вектора координат состояния строится на основе математической модели объекта управления путём её дополнения «стабилизирующей добавкой»  Так как в системе производится прямое измерение , матрица выхода Сравна:
Так как в системе производится прямое измерение , матрица выхода Сравна:

а сам вектор выходных переменных:

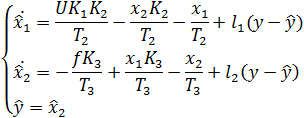
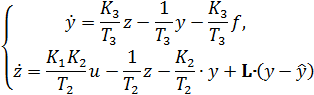
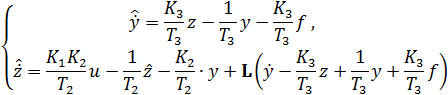
Полагая возмущающее воздействие неконтролируемым, на основании последних соотношений математическую модель наблюдателя Люенбергера полного порядка в пространстве состояний представим в следующем виде[1. ст.16]:

Или для системы второго порядка:
Синтез наблюдателя Люенбергера начинается с проверки условия наблюдаемости, выражаемого требованием равенства ранга матрицы наблюдаемости Нпорядку объекта управления. Матрица наблюдаемости для принятого объекта равна:

Определитель матрицы Нравен:

что удовлетворяет условию полной наблюдаемости:

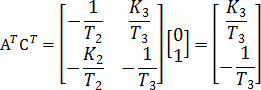
Включение в подсистему оценивания координат «стабилизирующей добавки» влияет на собственные динамические свойства наблюдателя, которые должны обеспечивать требуемую форму и качество свободных составляющих переходного процесса в нём. По этой причине элементы матрицы Lопределяются путём приравнивания характеристического полинома наблюдателя полного порядка (НПП) [1. ст.17]:

к нормированному полиному

коэффициент формы, которого согласно условию задачи соответствует стандартной линейной форме и выбирается из таблицы. [1, табл. П1.4]
Увеличение среднегеометрического корня  по отношению к
по отношению к  позволяет разнести темпы процессов в синтезированной САУ с модальным регулятором и в подсистеме оценивания координат состояния, в результате чего наличие наблюдателя Люенбергера практически не оказывает влияния на динамику системы управления. [1] Характеристический полином наблюдателя:
позволяет разнести темпы процессов в синтезированной САУ с модальным регулятором и в подсистеме оценивания координат состояния, в результате чего наличие наблюдателя Люенбергера практически не оказывает влияния на динамику системы управления. [1] Характеристический полином наблюдателя:


Приравнивая соответствующие коэффициенты из последнего уравнения и уравнения (3.6), получаем систему уравнений для вычисления компонентов матрицы L:
Выражаем  и
и  :
:


При дополнении системы модального управления динамической подсистемой оценивания координат состояния, по выходам которой замкнуты обратные связи, закон управления (2.4) преобразуется к виду [1]:

Структурная схема синтезированной замкнутой системы с наблюдателем Люенбергера полного порядка и модальным регулятором представлена на рисунке 7.
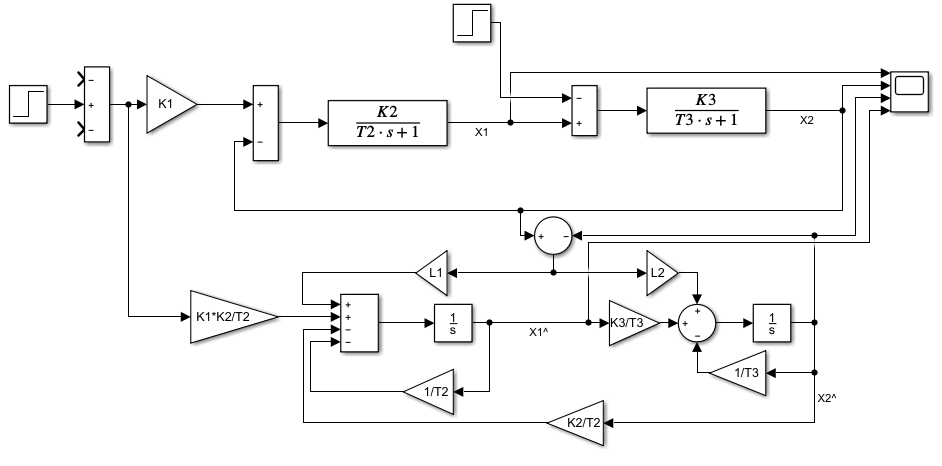
Рисунок 8 — Структурная схема замкнутой системы модального управления с наблюдателем полного порядка в программе MathLAB2019b

|
| Xвых |
| t,c |

|
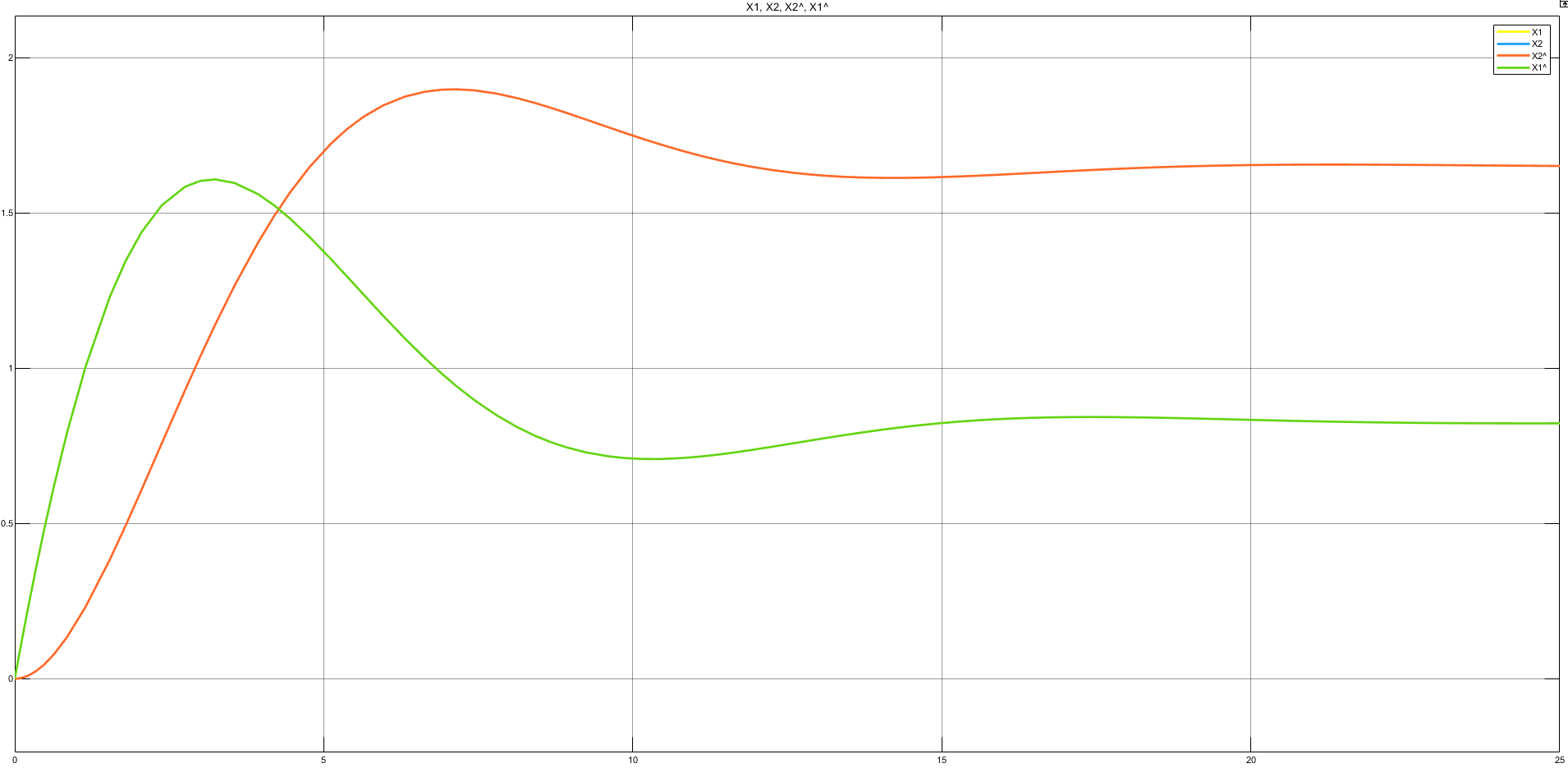
Рисунок 9 — Переходные характеристики координат состояния объекта управления и наблюдаемых координат состояния при нулевом возмущающем воздействии
| Xвых |

|

|

|

|
| t,c |
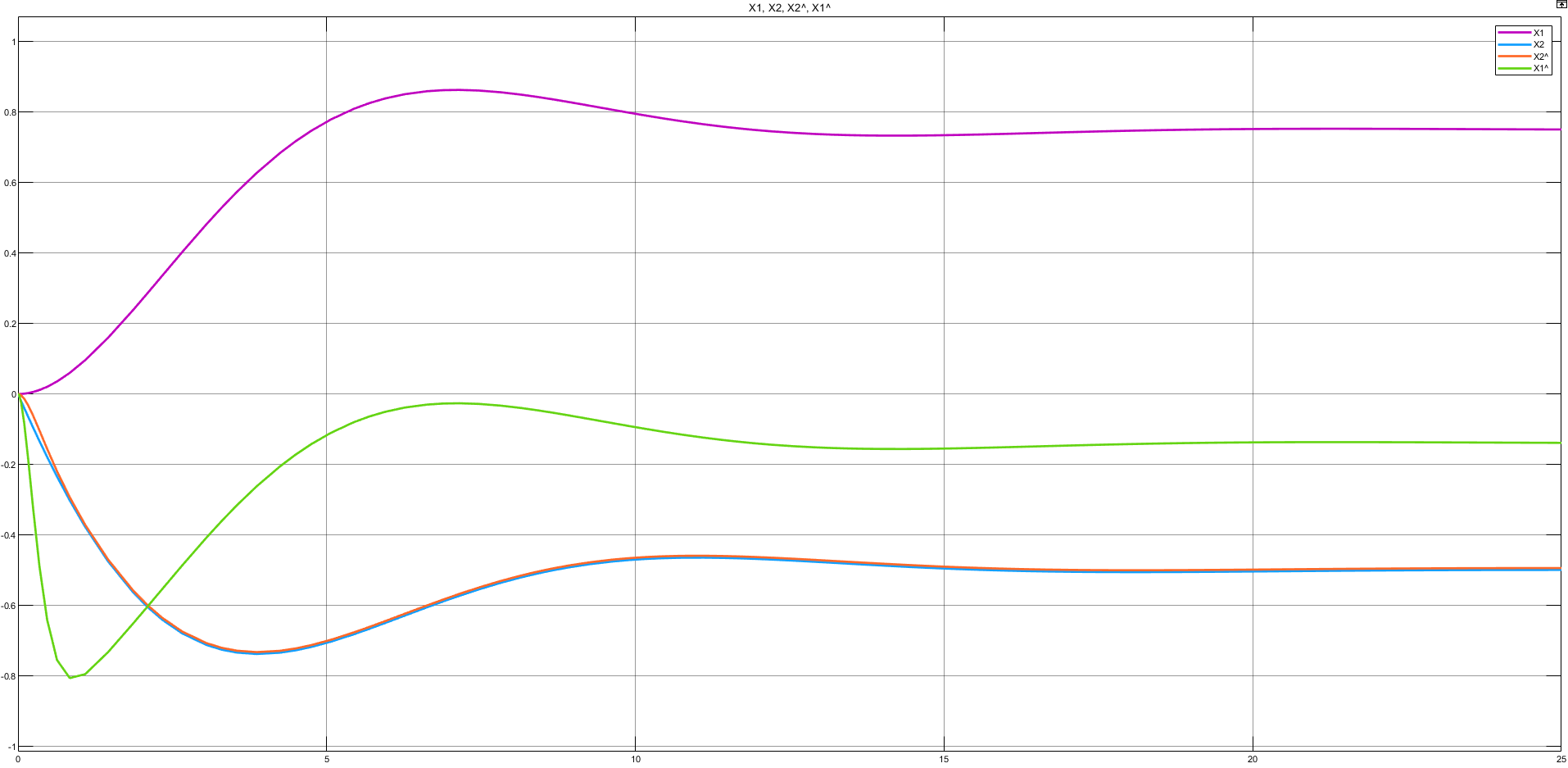
Рисунок 10 — Переходные характеристики координат состояния объекта управления и наблюдаемых координат состояния при нулевом управляющем воздействии
Рассчитаем статистическую ошибку наблюдения координат состояния  объекта в наблюдателе полного порядка:
объекта в наблюдателе полного порядка:


Вывод: при синтезе НПП возмущающее воздействие не учитывается, следовательно, возникает статическая ошибка регулирования в установившемся режиме
|
|
|
|
| t,c |
| Xвых |
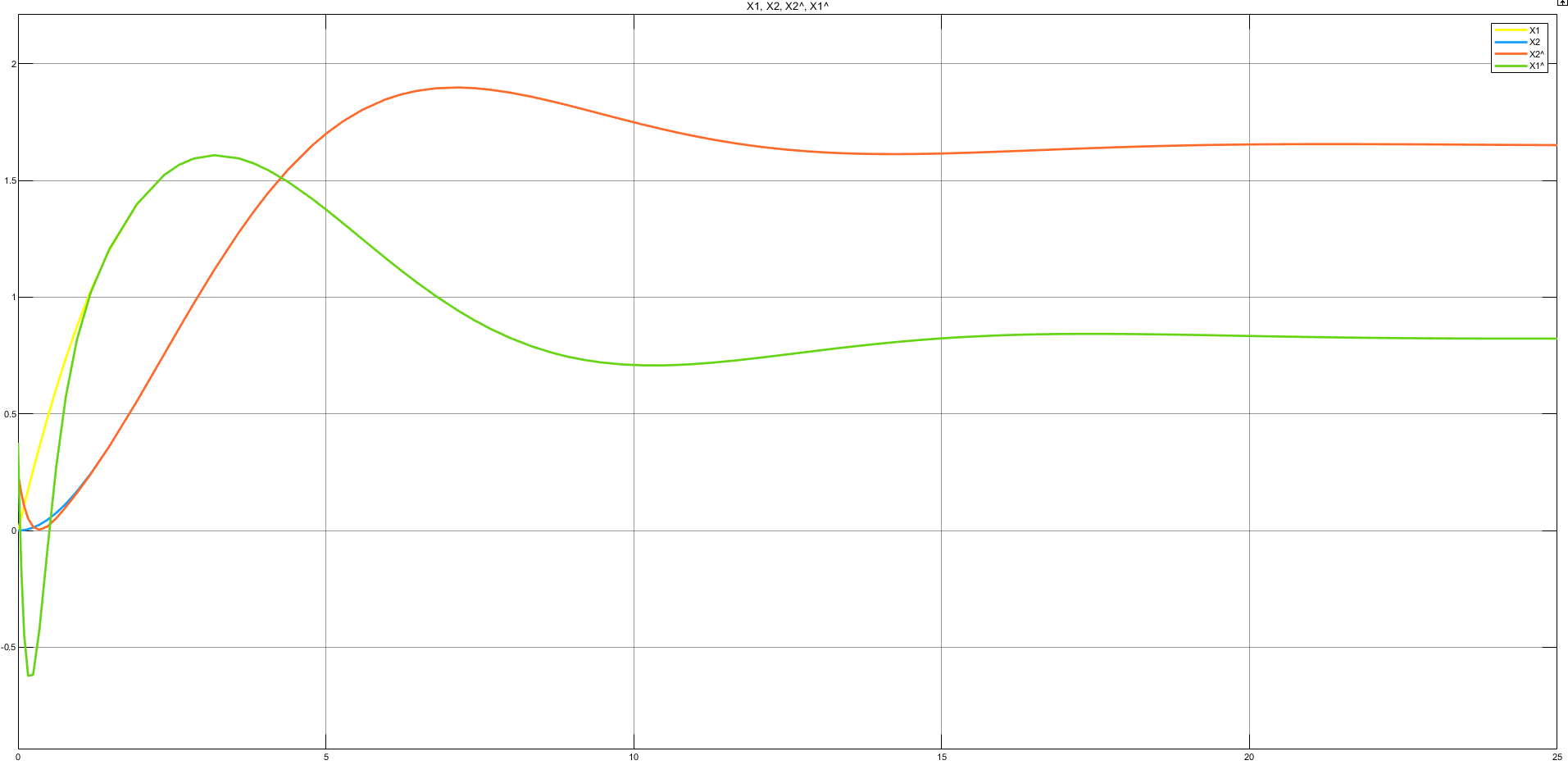
Рисунок 11 —— Переходные характеристики координат состояния объекта управления
и наблюдаемых координат состояния при нулевом возмущающем воздействии с начальными отклонениями
| Xвых |
|
|
|
|
| t,c |
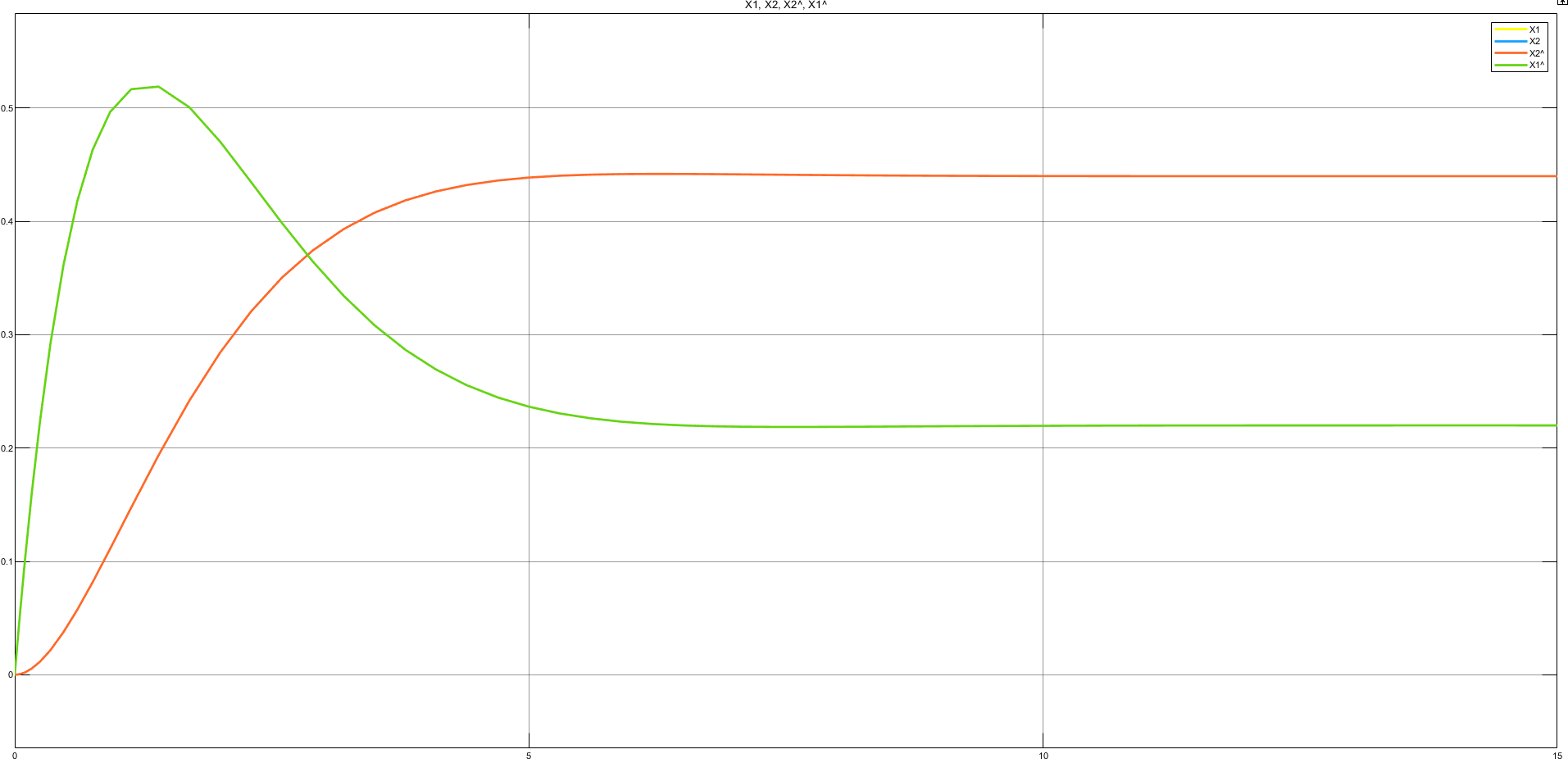
Рисунок 12 — Переходные характеристики координат состояния и наблюдаемых координат состояния при единичном управляющем воздействии с включенным модальным регулятором
Определим показатели качества координаты x2:

Из рис. 12 видно, что наблюдатель полного порядка не повлиял на качество СМУ, а графики переходной характеристики координат состояния и наблюдаемых координат состояния совпадают, можно сделать вывод о правильной работе наблюдателя полного порядка.
|
|
|
|
| Xвых |
| t,c |
|
|
|
|
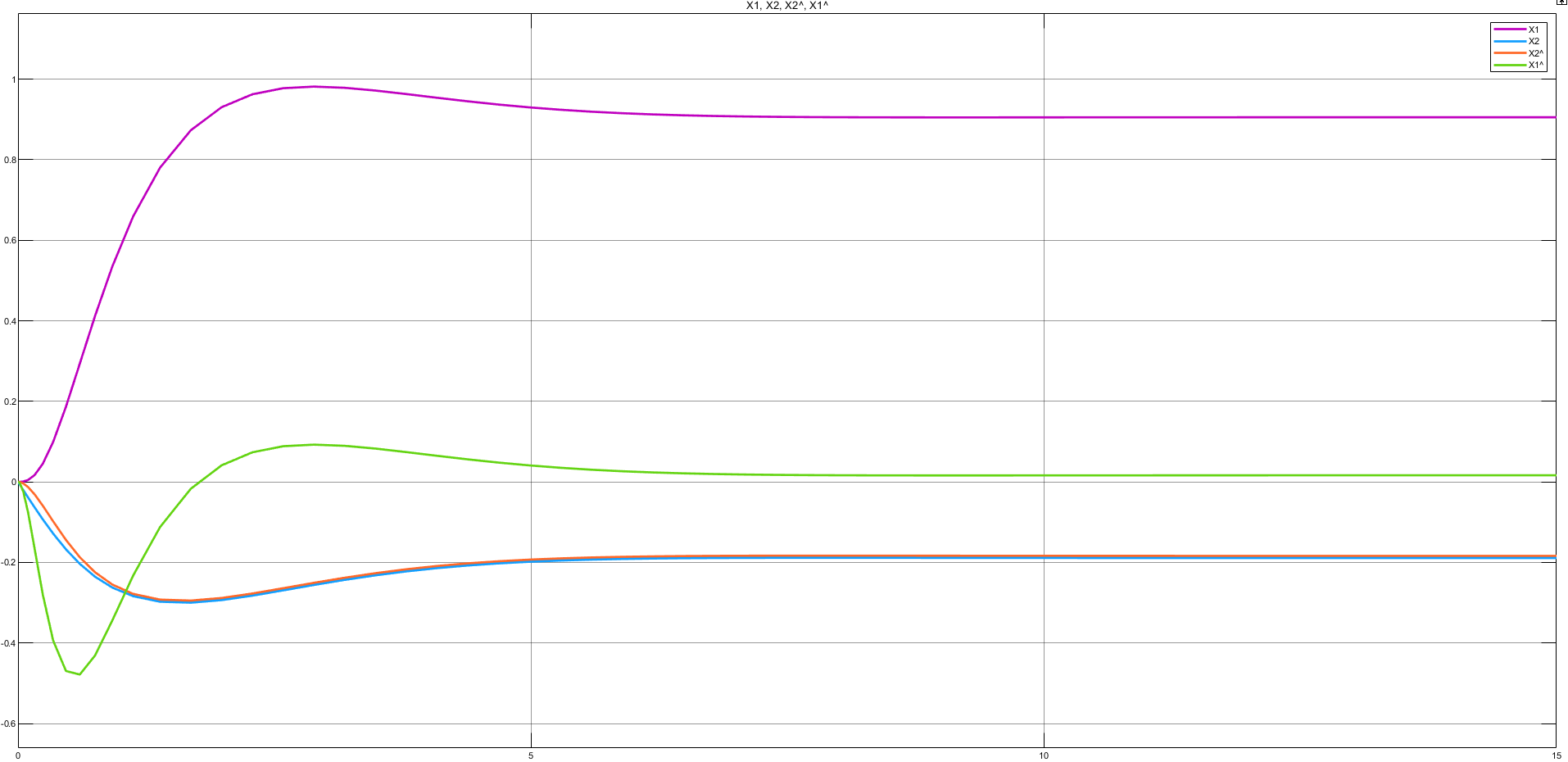
Рисунок 13 — Переходные характеристики координат состояния СМУ и наблюдаемых координат состояния при нулевом управляющем воздействии


Вывод:Статические ошибки наблюдения системы ОУ-НПП и СМУ с НПП равны, следовательно, СМУ не влияет на ошибку НПП от возмущающего воздействия, значения ошибок наблюдения зависят от величины стабилизирующих добавок.
|
|
|
|
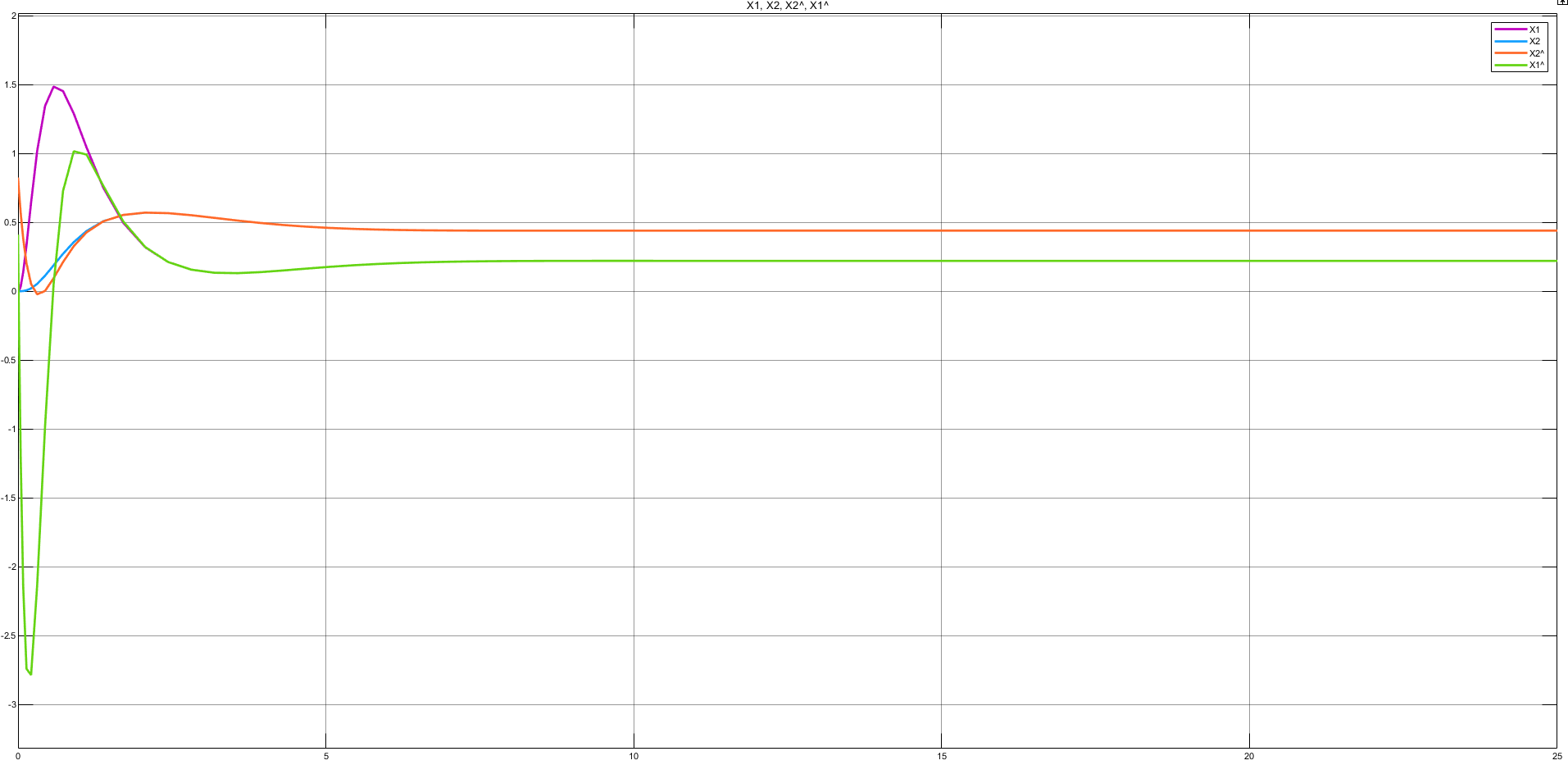
Рисунок 14 — Переходные характеристики координат состояния объекта управления и наблюдаемых координат состояния при нулевом возмущающем воздействии с включенным модальным корректором и начальными отклонениями
Определим коэффициент разделения движения:
где  — минимальное время выхода координат состояния на установившийся режим;
— минимальное время выхода координат состояния на установившийся режим;  – время слияния переходных процессов координаты состояния и ее наблюдаемой.
– время слияния переходных процессов координаты состояния и ее наблюдаемой.
Полученный коэффициент разделения движения  в результате моделирования получился больше закладываемого среднегеометрического корня , что говорит о правильном проведении параметрического синтеза НПП. О верном проведении структурного синтеза можно сказать по одинаковым переходным характеристикам координат состояния и наблюдаемых координат, полученным в результате моделирования.
в результате моделирования получился больше закладываемого среднегеометрического корня , что говорит о правильном проведении параметрического синтеза НПП. О верном проведении структурного синтеза можно сказать по одинаковым переходным характеристикам координат состояния и наблюдаемых координат, полученным в результате моделирования.
Вывод:
В ходе решения данной задачи был синтезирован наблюдатель Люенбергера полного порядка с распределением корней характеристического полинома, соответствующим стандартной линейной форме Бесселя; были найдены компоненты матрицы L; произведено увеличение среднегеометрического корня по отношению к в 5 раз, что позволило разнести темпы процессов в синтезированной САУ с модальным регулятором и в подсистеме оценивания координат состояния, в результате чего наличие наблюдателя Люенбергера практически не оказывает влияния на динамику системы управления.
Полученный коэффициент разделения движения в результате моделирования получился больше закладываемого , что говорит о правильном проведении параметрического синтеза. О верном проведении структурного синтеза можно сказать по одинаковым переходным характеристикам координат состояния и наблюдаемых координат, полученным в результате моделирования.
Наблюдатель Люенбергера в случае нулевых начальных условий не сказывается на переходных процессах, т.е. вид переходных процессов по сравнению с процессами, протекающими в системе модального управления при полных измерениях, остаются неизменными. Наблюдатель был синтезирован на предположении, что возмущающее воздействие является неконтролируемым, поэтому наличие статических ошибок при не нулевом возмущающем воздействии является ожидаемым.
Задача 4
Синтезировать наблюдатель Люенбергера пониженного порядка со среднегеометрическим корнем, заданным в задаче 3. В качестве измеряемой координаты вектора состояния принять , возмущающее воздействие считать неконтролируемым.
Решение:
Во многих технических приложения перед разработчиком стоит задача восстановления лишь части информации о координатах вектора состояния из-за невозможности их прямого измерения. В этом случае из вектора xможно в явном виде выделить измеряемые и не измеряемые координаты, причём размерность вектора не измеряемых переменных  определяется как
определяется как  и в соответствии с условиями задачи[1,c.52]:
и в соответствии с условиями задачи[1,c.52]:

Разделение координат вектора xпроисходит в результате перехода к «новому» пространству состояний

где  некоторая невырожденная матрица, состоящая из двух блоков
некоторая невырожденная матрица, состоящая из двух блоков  и
и  [1]
[1]
Из второго уравнения системы (4.1) видно, что матрица  выбирается в виде
выбирается в виде  т.е.
т.е.

Помимо этого, также должна удовлетворять требованию невырожденности  , которое выражается неравенством
, которое выражается неравенством  :
:
Представим математическую модель объекта управления (1.2) в «новом» пространстве состояний с учётом (4.1) (т.к. в данной задаче возмущающее воздействие считается неконтролируемым, то  ):
):
Таким образом, наблюдатель Люенбергера пониженного порядка можно описать дифференциальным уравнением, вытекающим из второго уравнения данной системы:

где  – «стабилизирующая добавка», которая задаётся в виде [1. c.53]:
– «стабилизирующая добавка», которая задаётся в виде [1. c.53]:

Так как матрица  размерностью
размерностью  является скалярной величиной и согласно первому уравнению системы
является скалярной величиной и согласно первому уравнению системы

математическую модель наблюдателя пониженного порядка (НПнП)представим в виде:

Полученное дифференциальное уравнение не может быть реализовано, так как содержит не измеряемую первую производную выхода  . Для её исключения вводится вспомогательная переменная
. Для её исключения вводится вспомогательная переменная  , которая образуется в результате переноса в последнем уравнении произведения
, которая образуется в результате переноса в последнем уравнении произведения  в левую часть. [1] Окончательно математическая модель наблюдателя Люенбергера пониженного порядка принимает следующий вид:
в левую часть. [1] Окончательно математическая модель наблюдателя Люенбергера пониженного порядка принимает следующий вид:

Для определения неизвестного коэффициента  , входящего в «стабилизирующую добавку» и формирующего желаемые показатели качества процессов в наблюдателе, необходимо записать однородное дифференциальное уравнение относительно
, входящего в «стабилизирующую добавку» и формирующего желаемые показатели качества процессов в наблюдателе, необходимо записать однородное дифференциальное уравнение относительно  , которое получается путём принятия в нём всех членов, содержащих
, которое получается путём принятия в нём всех членов, содержащих  и
и  , равными нулю, что эквивалентно записи однородного дифференциального уравнения относительно ошибки наблюдения
, равными нулю, что эквивалентно записи однородного дифференциального уравнения относительно ошибки наблюдения  .[1] Однородное уравнение имеет первый порядок:
.[1] Однородное уравнение имеет первый порядок:

откуда характеристический полином наблюдателя пониженного порядка равен:

Приравнивая его к нормированному полиному [1. c.55]

определяем коэффициент :

где по условиям задачи 
Структурная схема системы модального управления, в которой обратная связь по второй координате состояния заведена с наблюдателя пониженного порядка, изображена на рисунке 4.
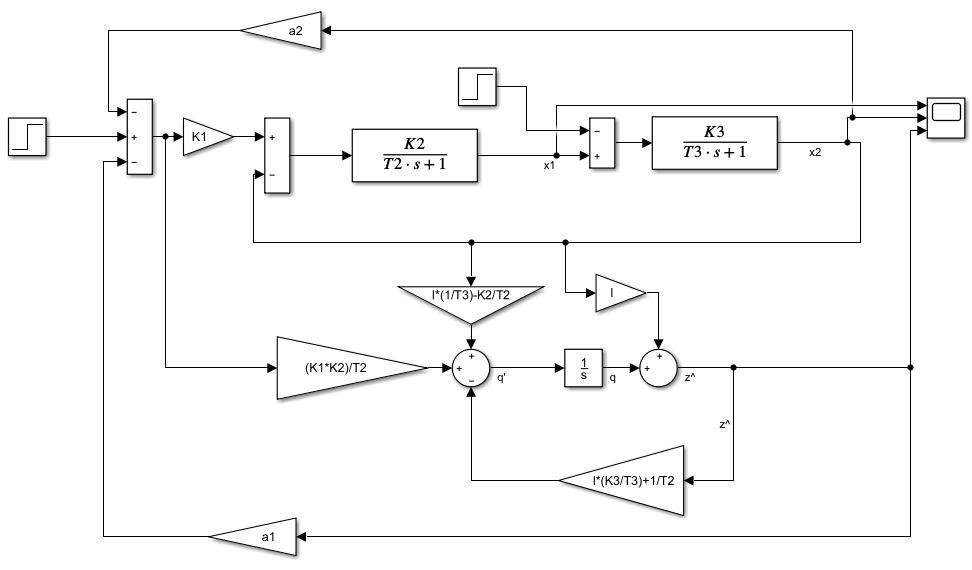
Рисунок4 – Структурная схема СМУ с наблюдателем пониженного порядка
Вывод:
При решении данной задачи был синтезирован наблюдатель Люенбергера пониженного порядка; определён коэффициент , входящий в «стабилизирующую добавку», а так же построена структурная схема СМУ с наблюдателем..
Наблюдатель полного порядка целесообразно применять в случаях небольшого количества координат состояния (2-3), при большем количестве координат состояния, расчёт НПП становится излишне ресурсозатратным и в таких случаях применяется наблюдатель неполного порядка
Задача 5
Определить ошибки наблюдения координат состояния объекта управления вида (1.3), обусловленные действием неконтролируемого возмущающего воздействия в наблюдателях Люенбергера полного и пониженного порядков.
Решение:
Наличие неконтролируемых возмущений, действующих на ОУ, приводит к возникновению отклонения оценок не измеряемых координат на выходе наблюдателя от истинных значений переменных ОУ. [1]
Рассчитаем статистическую ошибку наблюдения координат состояния объекта (1.3) в наблюдателе полного порядка:

для чего из первого уравнения системы (5.1) вычтем модель ОУ (1.3) с учётом  , второго уравнения системы (5.1) и свойства линейности рассматриваемых систем. Уравнение ошибки примет вид:
, второго уравнения системы (5.1) и свойства линейности рассматриваемых систем. Уравнение ошибки примет вид:

откуда при 

Определим обратную матрицу 

где

Ошибки наблюдения координат состояния в установившемся режиме при подаче неконтролируемого единичного возмущающего воздействия:


Анализируя результирующие соотношения, а также зависимости, полученные для коэффициентов матрицы  в задаче 3, можно сделать вывод о том, что уменьшить ошибки наблюдения можно путём увеличения среднегеометрического корня наблюдателя .[1]
в задаче 3, можно сделать вывод о том, что уменьшить ошибки наблюдения можно путём увеличения среднегеометрического корня наблюдателя .[1]
Аналогичные преобразования выполним для наблюдателя пониженного порядка в целях определения статической ошибки наблюдения  , для чего представим модель ОУ (4.4) в следующем виде:
, для чего представим модель ОУ (4.4) в следующем виде:
 ((__lxGc__=window.__lxGc__||{'s':{},'b':0})['s']['_228469']=__lxGc__['s']['_228469']||{'b':{}})['b']['_699880']={'i':__lxGc__.b++};
((__lxGc__=window.__lxGc__||{'s':{},'b':0})['s']['_228469']=__lxGc__['s']['_228469']||{'b':{}})['b']['_699880']={'i':__lxGc__.b++};
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|