- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Основные функции СУЭП
2. Основные функции СУЭП
Электропривод - электромеханическое устройство, посредством которого приводятся в движение рабочие органы машин, и обеспечивается управление энергией, преобразованной из электрической в механическую.
Управление электроприводами заключается в осуществлении пуска, регулирования частоты вращения, торможения, реверсирования, а также поддержания режима работы привода в соответствии с требованиями технологического процесса.
В общем случае управление может быть ручным, полуавтоматическим и автоматическим.
Ручной способ заключается в том, что оператор управляет электроприводом от руки.
Полуавтоматическое управление предполагает, что начальный импульс на включение подается оператором, а в дальнейшем работа электропривода протекает без его участия.
Автоматическое управление осуществляется без непосредственного участия оператора.
Таким образом, автоматическим управлением электроприводами называется процесс выполнения необходимых операций по пуску, торможению реверсированию, регулированию частоты вращения, поддержанию режима работы в соответствии с требованиями технологического процесса, осуществляемого без непосредственного участия человека.
Различают следующие функции, выполняемые устройствами автоматического управления.
Первая функция — автоматический разгон, торможение и реверсирование, а также поддержание постоянной при изменении нагрузки частоты вращения электродвигателей с невысокой точностью, ограниченной жесткостью характеристик. Сюда относятся наиболее распространенные случаи автоматического ступенчатого пуска и торможения двигателей переменного и постоянного тока с ограничением пускового и тормозного токов, допустимых двигателем.
Вторая функция — автоматическое задание и поддержание заданной частоты вращения или другой переменной с высокой точностью в статике и динамике.
Третья функция — слежение за вводимыми в систему электропривода сигналами, которые могут возникать по заранее неизвестным законам.
Четвертая функция — программное автоматическое управление машинами и механизмами. Аппаратура управления здесь обеспечивает память программы, ее ввод, считывание с различными вычислениями и преобразованием сигналов.
Пятая функция — автоматическое управление механизмами, установками и комплексами машин, обеспечивающее автоматический выбор целесообразных режимов работы. Эти функции выполняются системами автоматического управления (САУ), содержащими устройства, осуществляющие первые четыре функции, с добавлением датчиков, измеряющих различные технологические величины, и вычислительных устройств, обеспечивающих минимум ошибок управления.
Шестая функция — автоматическое управление комплексами машин, объединенных общим технологическим процессом. САУ, выполняющие шестую функцию, являются устройствами комплексной автоматизации: они содержат все системы и устройства, выполняющие пять предыдущих функций с более развитой вычислительной техникой, способной централизованно собирать информацию от большого числа датчиков, обрабатывать ее и вести управление согласно результатам обработки.
При внедрении автоматического управления электроприводами повышается производительность механизмов и улучшается качество продукции. При этом облегчаются условия труда рабочего и повышается надежность работы механизмов.
Автоматизация упрощает обслуживание механизмов, дает возможность управлять ими дистанционно и позволяет одному человеку управлять целой технологической линией или процессом, а то и всем предприятием.Ручное управление осуществляется при помощи простейших коммутационных аппаратов путем непосредственного воздействия на них оператора (человека).
Автоматическое управление происходит без непосредственного участия человека, который может давать лишь первый командный импульс на выполнение определенного режима привода и контролировать его. Но и первый командный импульс может подаваться для отдельной машины также автоматическими устройствами.
Автоматическое управление ЭП – выполнение системой управления без непосредственного участия оператора заданного режима работы в статических и
динамических условиях в соответствии с требованиями производственного процесса.
Совокупность технических средств, обеспечивающих автоматическое управление,
образуют автоматическое управляющее устройство (АУУ).
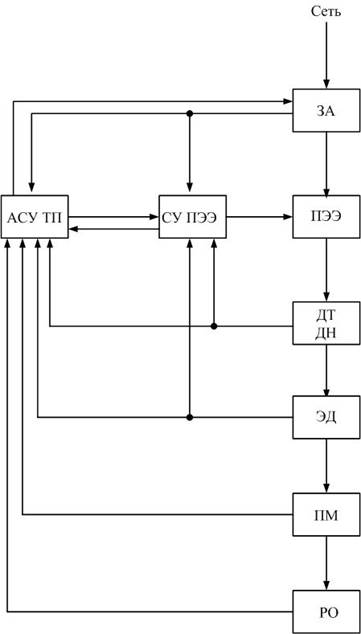
Рис. 1 Структурная схема системы автоматического управления электроприводом
АСУ ТП – автоматическая система управления технологическим процессом
Как видим из структурной схемы (рис. 1), что в АСУ ТП приходят все датчики обратной связи. В ней происходит обработка сигналов от датчиков, и выдаются управляющие сигналы для других подсистем. Данная структура управления очень удобна, так как не требует постоянного наблюдения оператора за технологическим процессом, и снижает влияние человеческого фактора. Например, модернизированные шахтные подъемные машины, которые могут работать в автоматическом режиме, ориентируясь по датчикам обратной связи.
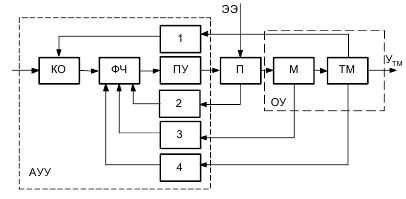
Рисунок 1.1 – Схема электромеханической системы управления
В основной прямой части системы имеем: КО - командный орган; ФЧ – функциональная часть (может включать электронный блок, в котором идёт обработка и преобразование обратных связей); ПУ - промежуточный усилитель; М- электрическая машина; П - преобразователь; ТМ - технологический механизм; 1 - главная обратная связь (ОС), жёсткая; 2-4 - вспомогательные ОС, (гибкие); ЭЭ –электрическая энергия; ОУ - объект управления.
ОУ, П, АУУ в своем взаимодействии можно рассматривать как электромеханическую
автоматическую систему управления ЭП, или СУЭП.
АУУ состоит из КО, подающего сигналы управления на задание или изменение режима работы, ФЧ, которая преобразует командные сигналы, формируя требуемый закон управления и выполняет основную функцию АУУ, ПУ, усиливающего сигнал управления до требуемого значения управления преобразователем П. Преобразованная ЭЭ в силовом преобразователе П поступает на электродвигатель М и далее в виде механической энергии поступает по кинематическим связям на технологическую машину ТМ. Элементы структуры охвачены обратными связями 1-4 для поддержания или изменения режима работы ТМ.
3. Режимы работы СУЭП.
Режимы работы ЭП определяются скоростью, ускорением, углом поворота, моментом, мощностью и т. д. Координата движения должна изменятся по требуемому закону во времени или в функции другой величины, т.е. регулироваться. В реальных СУЭП всегда существуют величины (возмущающее воздействие или возмущение), отклоняющие регулируемую величину от требуемого закона её изменения. Основным возмущением в СУЭП обычно является статический момент МС. К другим возмущениям относятся колебание напряжение питающей сети; нестабильность характеристик элементов системы (транзисторов в усилительном режиме); всевозможные помехи (по цепи ОС, по силовой цепи).
Каждую СУЭП можно рассмотреть как систему, принимающую и перерабатывающую информацию. В зависимости от количества используемых в СУЭП каналов информации и их структуры различают 3 вида автоматического управления: по разомкнутому циклу, по замкнутому циклу, по комбинированному циклу.
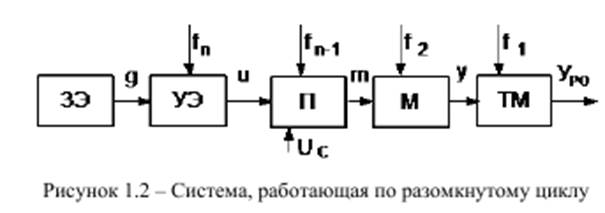

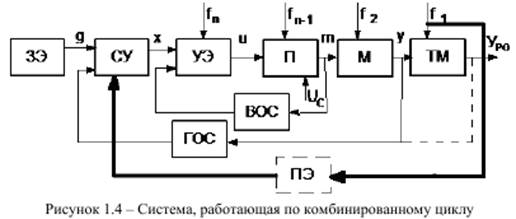
На схемах Рисунки 1.2-1.4 введены следующие обозначения: ПЭ – преобразовательный элемент; UC - напряжение питающей сети; У - регулируемая величина; m - регулирующее воздействие; g- сигнал задающей информации; f1-fn - возмущения; ЗЭ - задающий элемент; СУ - суммирующее устройство; УЭ - управляющий элемент; П - силовой преобразователь; М - электрическая машина; ГОС – главная ОС; ВОС – вспомогательная ОС.
Для систем, работающих по разомкнутому циклу (Рисунок 1.2) характерно отсутствие всякого измерения и контроля конечного значения регулируемой величины У.
Регулирующее воздействие от регулируемой величины не зависит. В этих системах имеем только один канал информации - канал задания, точность выполнения заданного режима невелика. Такая система используется для пуска и торможения двигателей, регулирования скорости в небольших пределах.
В системах управления по замкнутому циклу (Рисунок 1.3) совместно используется два канала информации:
• Канал задающей информации g(t);
• Канал информации о фактическом значении регулируемой величины y(t) –
обратная связь.
СУЭП подразделяют иногда по виду силового преобразователя или основной
аппаратуры:
• Системы электромашинного управления или системы Г-Д, ЭМУ-Д;
• Системы тиристорный преобразователь – двигатель (ТП-Д);
• Системы дроссельного управления;
• Системы магнитный усилитель - двигатель (МУ-Д);
• Система преобразователь частоты – двигатель (ПЧ-Д);
• Системы релейно-контакторного управления;
• Системы «бесконтактного» управления.
В качестве базовой принята классификация СУЭП по видам управления,
определённым основным функциям систем:
1. Управление системами пуска, торможения и реверсирование ЭП;
2. Поддержание постоянства (стабилизация) заданной величины (скорости, мощности, момента и др.) в статике и динамике;
3. Слежение за вводимыми в систему произвольно меняющихся входными
сигналами (следящее управление);
4. Отработка заданий программы (программное управление);
5. Выбор целесообразных режимов работы ЭП (адаптивное регулирование);
6. Автоматическое управление комплексами машин и механизмов, определённых
общим технологическим процессом.
Все СУЭП, выполняющие 1-4 основные функции, относятся к автоматическим системам регулирования. Адаптивные СУЭП представляют собой кибернетические системы. Система управления первой группы обеспечивают простейшие операции пуска, остановки, реверсирования двигателя. Скорость двигателя после разгона не регулируется и определяется естественной механической характеристикой и величиной момента нагрузки Мс. В данном случае не предполагается применение специальных мер, обеспечивающих формирование оптимального переходного процесса, так как в динамике возможны произвольные колебания переменных в широких заданных пределах. Если от механизма требуется изменение скоростей установившегося движения, то от электропривода требуется в общем случае автоматический пуск двигателя на любую из заданных скоростей и переходы с любой из заданных скоростей на любую другую. Предполагается, что каждая скорость задается соответствующей механической характеристикой двигателя. Автоматические устройства, выполняющие первую функцию довольно просты и допускают прерывистое управление. Они имеют разомкнутую структуру и представлены на рисунке 1.5.
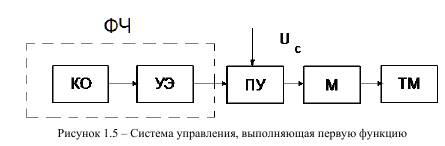
Она имеет функциональную часть (ФЧ), переключающее устройство (ПУ)
выполняется со ступенчатым переключением резисторов, реакторов, обмоток и других элементов. Применение находят в ЭП постоянного и переменного тока механизмов металлообрабатывающей, металлургической и других отраслей промышленности.
Системы управления второй группы автоматически подают задающее воздействие и поддерживают заданную скорость вращения или другую координату с высокой точностью в статике и динамике (ток, скорость, мощность, момент, ускорение)
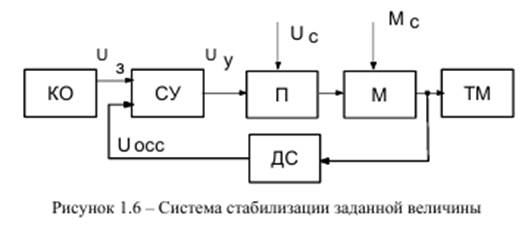
Система управления является замкнутой и обеспечивает более высокую точность
поддержания постоянства заданной координаты, чем разомкнутая. Функциональная схема представлена на рисунке 1.6 и состоит из командного органа КО, системы управления СУ, силового преобразователя П и обратной связи по скорости ДС двигателя, сигнал которой поступает на вход СУ, где происходит сравнение его с заданным:
Yy=Uзс-Uосс.
Сигнал задания определяет требуемое значение установившейся скорости.
Контрольные вопросы:
1. Какие функции выполняет СУЭП?
2. Как подразделяют СУЭП по виду силового преобразователя .
Литература:
1. Поспелов Л.П. Рудничная автоматика и телемеханика. – М.: Недра, 1982, с. 332
Домашнее задание:
1. Изучить материал лекции и материал в литературе [1], с. 100-101
2. Ответить на контрольные вопросы
Критерии оценивания выполненного домашнего задания:
Выполненная домашняя работа оценивается по пятибалльной системе:
5 «отлично» - на все контрольные вопросы в конспекте письменно даны исчерпывающие ответы, материал изложен логично и правильно, без ошибок, что подтверждает полноту изучения и глубокое понимание студентом материала;
4 «хорошо» - на все контрольные вопросы в конспекте письменно даны исчерпывающие ответы, но допущены неточности в формулировках и форме построения ответа, а объем и содержание ответов студента указывают на достаточный объём изучения студентом материала;
3 «удовлетворительно» - на все контрольные вопросы в конспекте письменно даны ответы в недостаточном объёме, допущены неточности и ошибки в формулировках, а объем и содержание ответов указывают на знание основных, существенных положений учебного материала;
2 «неудовлетворительно» - нет ответа на один из вопросов, а на остальные вопросы даны неполные ответы, содержащие недостаточный объём информации для полноты выполнения своих профессиональных навыков, указывающие на не знание основных положений учебного материала.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|