- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Лекция 7. Решение обыкновенных дифференциальных уравнений в MathCAD
Лекция 7. Решение обыкновенных дифференциальных уравнений в MathCAD
Краткие теоретические сведения
Для решения дифференциальных уравнений с начальными условиями система Mathcad имеет ряд встроенных функций:
rkfixed – функция для решения ОДУ и систем ОДУ методом Рунге–Кутта четвертого порядка с постоянным шагом;
Rkadapt – функция решения ОДУ и систем ОДУ методом Рунге–Кутта с переменным шагом;
Odesolve – функция, решающая ОДУ блочным методом.
Ниже приведено описание стандартной функции rkfixed с указанием параметров функции.
rkfixed(y, x1, x2, p, D)
Аргументы функции:
y – вектор начальных условий из k элементов (k – количество уравнений в системе);
x1 и x2 – левая и правая границы интервала, на котором ищется решение ОДУ или системы ОДУ;
p – число точек внутри интервала (x1, x2), в которых ищется решение;
D – вектор, состоящий из k-элементов, который содержит первую производную искомой функции или первые производные искомых функций, если речь идет о решении системы.
Результатом работы функции является матрица из p+1 строк, первый столбец которой содержит точки, в которых получено решение, а остальные столбцы – сами решения.
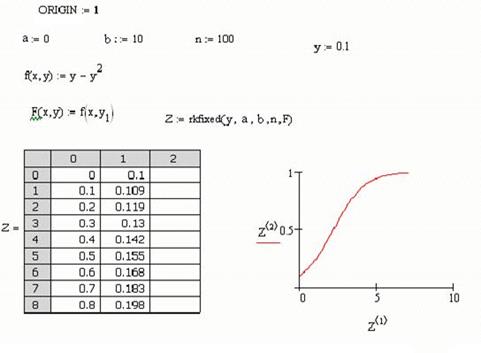
На рисунке 2.7.1 приведены конкретные примеры решения различных дифференциальных уравнений и систем ОДУ в MathCAD.

| 
|
| Рисунок 2.7.1 – Примеры решения дифференциальных уравнений и систем | |
При решении дифференциального уравнения первого порядка нужно создать вектор начальных условий из одного элемента Y1, который затем используется при формировании вектора-функции правой части дифференциального уравнения. При обращении к функции rkfixed указывается имя вектора Y, границы интервала, на котором ищется решение уравнения, например, (0 ; 2), количество точек, в которых ищется решение – 100, вектор-функция, описывающая правую часть дифференциального уравнения – D. В результате получается матрица z, в первом столбце которой содержатся значения аргумента искомой функции, во втором – значения самой результирующей функции. При построении графика функции первый столбец полученной матрицы указывается как аргумент, второй столбец – как функция.
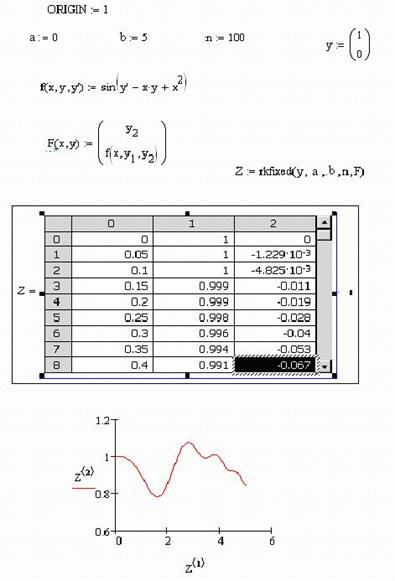
При решении системы дифференциальных уравнений нужно создать вектор начальных условий из двух элементов, например, вектор v, который затем используется при формировании вектора-функции правой части дифференциального уравнения. При обращении к функции rkfixed указывается имя вектора v, и границы интервала, на котором ищется решение уравнения, например, (0 ; 5), количество точек, в которых ищется решение – 100, вектор-функция, описывающая правую часть дифференциального уравнения – D. В результате получается матрица s, в первом столбце которой содержатся значения аргумента искомых функций, во втором и третьем столбцах – значения самих функций при соответствующем значении аргумента. При построении графика можно воспользоваться первым столбцом полученной матрицы как аргументом, а вторым и третьим столбцами – как функциями.
На рисунке 2.7.2 приведен пример решения дифференциального уравнения второго порядка с использованием функции rkfixed. Необходимо решить дифференциальное уравнение второго порядка с заданными начальными условиями вида:

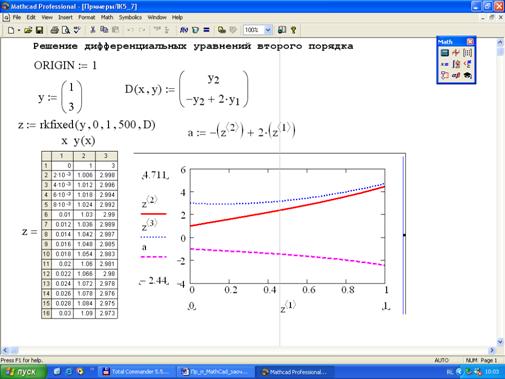
|
| Рисунок 2.7.2 – Пример решения дифференциальных уравнений второго порядка с помощью rkfixed |
Для решения уравнения с помощью функции rkfixed нужно выполнить замену переменных и привести дифференциальное уравнение второго порядка к двум дифференциальным уравнениям первого порядка. Вид этих уравнений приведен ниже.
Документ формируется точно так же, как и при решении системы ОДУ.
На рисунке 2.7.2 показана возможность вычисления вектора второй производной найденной функции – вектора а, построены графики исходной функции, функций первой и второй производных.
Для численного интегрирования ОДУ вMathCAD имеется выбор – либо использовать вычислительный блок Given/Odesolve, либо встроенные функции. Оба способа обладают одинаковыми возможностями, но при использовании блока решения запись уравнений более привычна и наглядна, однако отдельная функция может быть использована в составе других функций и программ. Рассмотрим оба варианта решения.
Вычислительный блок Given/Odesolve
Ниже приведены два примера для решения дифференциальных уравнений первого и второго порядка с использованием вычислительного блока решения Given/Odesolve.
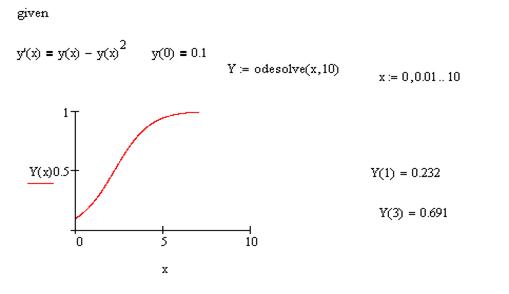
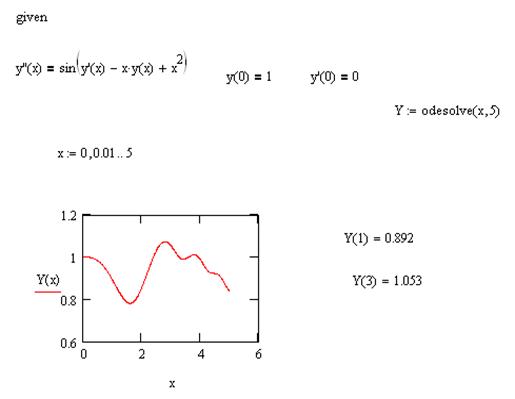
Вычислительный блок для решения одного ОДУ состоит из трех частей:
- ключевое слово given;
- ОДУ и начальные условия, записанные с помощью логического равенства;
- встроенная функция Odesolve(x, b) относительно независимой переменной x на интервале [a, b]; b – верхняя граница отрезка интегрирования. Допустимо и даже предпочтительнее задание функции Odesolve(a, b, step) с тремя параметрами, где step – внутренний параметр численного метода, определяющий количество шагов; чем больше step, тем с лучшей точностью будет получен результат, но тем больше времени будет затрачено на его поиск.
Функция Odesolve возвращает решение задачи в виде функции. Эта функция не имеет символьного представления и может только вернуть численное значение решения уравнения в любой точке интервала интегрирования.
Функция Odesolve использует для решения дифференциальных уравнений наиболее популярный алгоритм Рунге-Кутта четвертого порядка, описанный в большинстве книг по методам вычислений. Он обеспечивает малую погрешность для широкого класса систем ОДУ за исключением жестких систем. Если щелчком правой кнопки мыши на блоке формул с функцией Odesolve вызвать контекстное меню, то можно изменить метод вычисления решения, выбрав один из трех вариантов: Fixed – метод Рунге-Кутта с фиксированным шагом интегрирования (этот метод используется по умолчанию), Adaptive – также метод Рунге-Кутта, но с переменным шагом, изменяемым в зависимости от скорости изменения функции решения, Stiff – метод, адаптированный для решения жестких уравнений и систем (используется так называемый метод PADAUS).
Альтернативный методрешения ОДУ заключается в использовании одной из встроенных функций: rkfixed, Rkadapt, или Bulstoer. Все они решают задачу Коши для системы дифференциальных уравнений первого порядка, но каждая из них использует для этого свой метод. Для простых систем не играет большой роли, какой метод использовать – все равно получите решение достаточно быстро и с высокой точностью. Но для сложных или специфических систем бывает, что некоторые методы вообще не могут дать удовлетворительного решения за приемлемое время. Именно для таких сложных, но не редких случаев в MathCAD и введено несколько различных методов решения систем ДУ.
- rkfixed– метод Рунге-Кутта с фиксированным шагом интегрирования. Самый простой и быстрый метод, но далеко не всегда самый точный. Полностью аналогичен использованию функции Odesolve с выбранным в контекстном меню методом Fixed.
- Rkadapt – метод Рунге-Кутта с переменным шагом интегрирования. Величина шага адаптируется к скорости изменения функции решения. Данный метод позволяет эффективно находить решения уравнений, в случае если оно содержит как плавные, так и быстро меняющиеся участки. Там, где решение меняется слабо, шаги выбираются более редкими, а в областях его сильных изменений – частыми. В результате для достижения одинаковой точности требуется меньшее число шагов, чем для rkfixed. Полностью аналогичен использованию функции Odesolve с выбранным в контекстном меню методом Adaptive.
- Bulstoer – метод Булирша-Штера. Этот метод более эффективен, чем метод Рунге-Кутта, в случае если решение является плавной функцией.
Имена функций Rkadapt и Bulstoer начинаются с прописной буквы. В MathCAD для некоторых имен функций неважно, с какой буквы они записаны, но для перечисленных функций это принципиально, т.к. в MathCAD также существуют функции с такими же именами, только записанные с маленькой буквы – rkadapt, bulstoer. Эти функции используются в тех случаях, когда важным является решение задачи в конечной точке интервала интегрирования.
Выше приведены примеры решения тех же дифференциальных уравнений первого и второго порядка, которые были решены с использованием вычислительного блока Given/Odesolve.
Применение встроенных функций в документах MathCADвыглядит сходным образом, т.е. функции Rkadapt и Bulstoer имеют тот же синтаксис, что и выше приведенная функция rkfixed. Назначение аргументов в этих встроенных функциях следующее:
- y – вектор начальных значений неизвестных функций, входящих в систему. В случае одного уравнения и одной неизвестной функции – это просто число.
- а – начало отрезка, на котором ищется решение системы (отрезка интегрирования). Именно в этой точке значения неизвестных функций принимаются равными элементам вектора y.
- b – конец отрезка интегрирования.
- n – количество частей, на которые разбивается отрезок [a, b] при решении системы. Чем больше это число, тем точнее получается решение, но расчет занимает больше времени.
- F(x,y) – векторная функция, элементы которой содержат правые части уравнений системы в нормальной форме (когда левые части – первые производные от соответствующих функций, а в правых частях производные отсутствуют). Аргументами этой функции являются вектор y, элементы которого соответствуют различным неизвестным функциям системы, и скалярный аргумент x , соответствующий независимой переменной в системе. В случае одного уравнения функция F может быть скалярной функцией, зависящей от двух скалярных переменных x и y.
Возвращаемым значениемвсех вышеперечисленных встроенных функций является матрица. Первый столбец этой матрицы – это точки, на которые разбивается отрезок [a, b], а остальные столбцы – это значения функций системы в этих точках. Если в аргументе функции rkfixed было указано количество частей n = 100, то матрица будет содержать 101 строку вместе с начальной.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|