- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Список литературы.
УДК 621.9.06
А.С. Востриков, д-р техн. наук, проф.,
Б.М. Боченков, канд. техн. наук,
Новосибирский государственный технический университет
Опыт разработки мехатронных систем в НГТУ
На страницах первого номера журнала «Мехатроника» развернулось обсуждение основных определений и терминов мехатроники. [1,2] Это обсуждение представляется весьма важным и актуальным, поскольку позволяет выделить наиболее показательные, наиболее информативные отличия мехатронных систем от традиционных и определить направления проектирования систем воспроизведения движений, обладающих качественно новыми, предельными показателями.
Следует отметить, что все определения в этой области науки, как и в других прикладных науках, обладают либо неполнотой и неточностью, либо нечеткостью и расплывчатостью. Терминология мехатроники должна устояться со временем, а сейчас более важным представляется определение сути мехатронного подхода к проектированию систем воспроизведения движений с компьютерным управлением, который определяет их преимущества по сравнению с системами, построенными на основе традиционных элементов и узлов.
В качестве базового элемента мехатронной системы рассматривается мехатронный модуль, под которым понимается законченный (иногда автономный) узел электромеханической системы, в конструкции которого взаимопроникающе интегрированы электрические и механические силовые (энергетически нагруженные) элементы и слаботочные информационные элементы (датчики, усилители, преобразователи). Безусловно, важным элементом в определении мехатронного модуля является понятие взаимопроникающей интеграции (симбиоза). Обычное объединение традиционных элементов электромеханики и микроэлектроники еще не приводит к появлению мехатронного модуля или системы. Мехатроника предполагает объединение, интеграцию механических, электрических, электронных силовых и информационных устройств на таком уровне, когда созданное устройство невозможно расчленить на отдельные составляющие без снижения показателей качества.
Мехатронный подход к проектированию не ограничивается только физическим, аппаратным, конструкционным объединением электромеханических и электронных элементов и узлов, но и предполагает их интеграцию на алгоритмическом уровне. При этом создаются новые алгоритмы, обеспечивающие новые качественные показатели системы. Например, при распространении принципов векторного управления, которые широко применяются при формировании законов управления электрическими машинами переменного тока, на полупроводниковый силовой преобразователь, были получены алгоритмы[3], обеспечивающие высокие энергетические показатели и собственно преобразователя и всей мехатронной системы вцелом.
На первом этапе развития мехатроники наиболее эффективной являлась интеграция таких элементов системы воспроизведения движений, как рабочий орган, механическое устройство, исполнительный двигатель и сенсоры. При этом под интеграцией понималось, прежде всего, конструкционное объединение указанных элементов. Устройства, построенные по такому принципу, обладают следующими преимуществами:
- Сокращаются кинематические цепи и, как следствие, устраняются механические неидеальности в виде люфтов, нежесткостей и т.д.
- Появляется возможность перемещения в пространстве всего мехатронного модуля и, таким образом, расширяются компоновочные возможности мехатронной многомодульной системы.
В НГТУ длительное время велись работы по созданию таких модулей и систем. При проведении разработок систем воспроизведения движений с предельными показателями была выявлена необходимость комплексного похода к проектированию всех элементов таких систем. В 1975г был создан отдел систем воспроизведения движений (ОСВД), в тематике работ которого основное место заняли разработки мехатронных систем и модулей. В результате чего, как проявление «синергетического» эффекта от объединения усилий разработчиков различных специальностей, были созданы мехатронные модули и системы, обладающие качественно-новыми показателями.
Одним из первых был разработан мехатронный модуль широкого применения – электромеханизм поступательного движения (ЭПМ). Это конструкция, объединяющая в едином корпусе электродвигатель постоянного или переменного тока с возбуждением от высокоэнергетических постоянных магнитов, шарико-винтовую передачу, винт которой перемещается поступательно в аксиальном отверстии внутри ротора двигателя, а гайка жестко скреплена с ротором, электромагнитный тормоз и набор датчиков состояния (скорости, положения, момента, тока, температуры). ЭПМ были применены в разработках НГТУ в области спецтехники (стабилизаторы вертикали и горизонтали) автотранспорта (рулевое управление многоосных большегрузных автомобилей) и в станкостроении (приводы подачи многокоординатных станков). Являясь электрическими аналогами гидроцилиндров, ЭПМ обладают лучшей управляемостью и удобствами в обслуживании, как следствиями их электромеханической природы.
Другим в хронологическом порядке мехатронным модулем в разработкках НГТУ явился безредукторный электрошпиндель на базе конструкции высокомоментного синхронного электродвигателя с возбуждением от постоянных магнитов и электронного коммутатора, переключающего секционированную обмотку двигателя и обеспечивающего ступенчатое регулирование в зоне постоянства мощности[5]. Эта разработка была выполнена для специального многокоординатного станка. Отсутствие редуктора позволило перемещать шпиндель в пространстве по криволинейной траектории, что значительно расширило функциональные возможности станка.
Электропривод главного движения, выполненный на базе такого мотор-шпинделя, обладает широким диапазоном регулирования частоты вращения (Д=2500), в том числе при постоянстве мощности на валу(Др=10), высокой точностью и высокими динамическими свойствами. Это позволяет оптимизировать процесс обработки, значительно повышая производительность станка.
Основные технические данные мотор-шпинделя:
1. Максимальная частота вращения, об/мин. 5000
2. Номинальная частота вращения, об/мин. 500
3. Длительный вращающий момент, Нм. 300
4. Максимальный вращающий момент, Нм 430
Не менее удачной оказалась разработка мехатронного модуля безредукторного поворотного стола (рис 2), предназначенного для обеспечения режимов позиционирования и контурной обработки на фрезерных, сверлильных и расточных станках. Поворотный стол имеет встроенный электродвигатель, ротор которого закреплен с планшайбой, блок датчиков состояния двигателя, тормоз, обеспечивающий фиксацию планшайбы в нужном положении. Предусмотрена возможность установки точного датчика углового положения планшайбы. Безредукторное совмещение в конструкции поворотного стола планшайбы и ротора электродвигателя позволяет полностью исключить люфт и расширить технологические возможности за счет увеличения точности и скорости позиционирования и контурной обработки. При этом упрощается конструкция стола, уменьшается количество деталей, повышается его жесткость.
Разработано и изготовлено несколько поворотных столов. Основой первой конструкции был асинхронный двигатель с массивным ротором-планшайбой, однако последующие конструкции основывались на синхронных двигателях с постоянными магнитами.
Основные технические характеристики поворотных столов:
| Модель | СП200 | СП320 | СП630 | СП630В | СП1000 |
| Вращающий момент (30 мин.), Нм | |||||
| Вращающий момент (30 мин.), Нм | |||||
| Внешний диаметр, мм | |||||
| Высота, мм | |||||
| Точность позиционирования, уг. сек. |
Опыт разработки безредукторных поворотных столов нашел применение при создании моделирующих динамических стендов для полунатурных испытаний элементов летательных аппаратов[6]. Схема такого трехступенчатого стенда, обеспечивающего вращение объекта испытаний по трем координатам, приведена на рис 3. На основании 1 размещен мехатронный модуль 2 курсовой координаты, выходным элементом которого является вилка 3 стенда. В обе стойки встроены модули 4 тангажной координаты, сочлененные с модулем 5 креновой координаты, выполненным в виде кольца. Внутри кренового кольца помещен объект испытаний 6, который посредством координатных модулей может вращаться в трех взаимно-перпендикулярных плоскостях. Применение безредукторных мехатронных модулей, в которых интегрированы рабочий орган, исполнительный двигатель и система датчиков, позволяет существенно повысить динамические показатели стенда и равномерность движения по координатам.
Создание системы мехатронных модулей позволило расширить комплектность разработок НГТУ, включив в них разработку конструкций и компоновок самого различного технологического оборудования, к которому в первоначальной стадии только приспосабливали разрабатываемые системы электроприводов. При этом мехатронные модули позволили создавать разнообразное технологическое оборудование нетрадиционных компоновок.
Одним из представителей такого технологического оборудования является многокоординатный обрабатывающий центр с перемещающимся по дуге шпинделем. (рис 4 и 5). В этом станке, изготовленном Дмитровским заводом фрезерных станков, нашли применение такие мехатронные модули как электромеханизм поступательного движения, безредукторный поворотный стол и безредукторный мотор-шпиндель.
В наибольшей степени нетрадиционность и гибкость компоновки технологического оборудования, построенного на мехатронных модулях, проявились в многокоординатном модуле пространственных перемещений (ММПП), который показан на рис 6. ММПП содержит шесть механизмов поступательного движения с двухстепенными шарнирами, соединяющими станину с подвижной платформой, и предназначен для автоматического перемещения платформы с установленным на ней оборудованием по заданной пространственной траектории с требуемыми динамическими показателями. Отличительными особенностями ММПП являются внутренняя замкнутость кинематических цепей и работа основных элементов конструкции на деформациях растяжения-сжатия. Эти особенности позволяют существенно снизить материалоемкость технологического оборудования. «Платой» за это является повышение «интеллектуалоемкости» т. е. увеличение удельного веса вычислительных процессов связанных с обработкой информации. ЭМПП проектировался для применения в качестве основы металлообрабатывающего станка и как динамический многокоординатный моделирующий стенд. Основным достоинством стендов, построенных на базе ММПП, являются открытая платформа для размещения испытуемого объекта, который в этом случае не затеняется элементами конструкции стенда, сочетание высоких точностных и силовых характеристик, малая металлоемкость, универсальность применения, гибкость компоновки. Стенд оснащен системой управления, включающей в себя мощную вычислительную машину, которая позволяет программировать траекторию движения испытуемого объекта в системе координат Декарта-Эйлера. Также возможна работа стенда в замкнутой системе автоматического регулирования под управлением машины верхнего уровня.
Накопленный опыт проектирования мехатронных модулей, а также прогресс в области магнитных материалов, приведший к появлению относительно недорогих высокоэнергетических постоянных магнитов, позволили создавать мехатронные системы не только для промышленности и военной техники, но и для бытовой техники.
Так, в НГТУ проведена разработка и, совместно с предприятиями г. Новосибирска, выпущена опытная партия инвалидных кресел-колясок на базе безредукторных мотор-колес (рис. 7).
Мотор-колесо представляет собой мехатронный модуль,где в единой конструкции объединены собственно колесо с пневматической шиной, электрический бесколлекторный высокомоментный двигатель, индуктивный датчик – измеритель параметров движения и тормоз. Размеры такой конструкции не выходят за габариты обычного немеханизированного колеса. Благодаря специальным техническим решениям, примененным в конструкции, электрический двигатель по основному показателю – удельному моменту превосходит лучшие зарубежные и отечественные образцы. Питание мотор-колес осуществляется от аккумуляторной батареи через электронный блок, который позволяет плавно регулировать скорость в широких пределах. Полное отсутствие механических редукторов и применение оригинальных алгоритмов управления позволяет снизить до минимума потери энергии и обеспечить её рекуперацию в режиме торможения, что существенно увеличивает дальность пробега без подзарядки источников энергии.
Мотор-колесо представляет собой универсальную конструкцию, которая может быть применена для транспортных средств самого различного назначения, например, для электровелосипедов, для специальных электромобилей, используемых при игре в гольф, для внутризаводского транспорта, для уборочных машин и т.д.
Сотрудниками НГТУ в содружестве с ОАО «ЭЛСИБ», ПО «Север» и ООО «Новые технологии» разработан электромеханический усилитель руля (ЭМУР) легковых автомобилей, который представляет собой безредукторную электромеханическую систему с электронным управлением и предназначен для уменьшения усилия, прикладываемого водителем к рулевому колесу, повышения комфортности управления автомобилем и безопасности движения. В отличие от электромеханических усилителей руля, анонсированных рядом зарубежных фирм, в настоящей разработке используется идеология безредукторного построения усилителя, что позволяет повысить надежность устройства, исключить из состава ЭМУР узел самовозврата и аварийный расцепитель.
В конструкции ЭМУРа объединены:
- бесконтактный двигатель с возбуждением от постоянных магнитов;
- электронный контроллер, осуществляющий энергетические и информационные функции;
- датчик вращающего момента;
- датчик положения ротора.
Конструктивное совмещение ряда функциональных узлов датчиков, электродвигателя и собственно рулевой колонки позволило значительно уменьшить габаритные размеры ЭМУРа и обеспечить заданные энергетические характеристики, необходимые при реализации ЭМУР для автомобилей семейства ВАЗ и ГАЗ.
Следует отметить, что большинство из перечисленных разработок внедрено в производство и рассмотренные мехатронные системы выпускались или готовятся к выпуску на промышленных предприятиях России.
Список литературы.
1. Александров В.В. Несколько слов о мехатронике // Мехатроника.2000.№1.-с.4-5.
2. Подураев Ю.В., Кулешов В.С. Принципы построения и современные тенденции развития мехатронных систем // Мехатроника.. 2000.№1.-с.5-10.
3. Боченков Б.М., Жуков А.А., Судак А.Г. Алгоритмы управления инвертором с векторной дискретной ШИМ // Мехатронные системы и их элементы / Новосиб. электоротехн. ин-т.-Новосибирск.1990.-с.52-59.
4. Разработка концепции построения системы мехатронных устройств для гибкого технологического оборудования с широкими функциональными возможностями: Отчет о НИР (закл.) / Новосиб. электротехн. ин-т.; руководитель Каган В.Г. -№ГР01890078556, инв №0290.0016417.-Новосибирск.1989.-81с.
5. Каган В.Г., Рояк С.Л., Боченков Б.М., Шраменко С.Г. Транзисторные приводы с бесконтактными синхронными двигателями для станков с ЧПУ // Электротехническая промышленность. Серия Электропривод.М. Информэлектро.1984. вып.1-с.11-14.
6. Шор А.М., Хомяков В.В., Середкин В.П. Моделирующий стенд с безредукторными электроприводами // Мехатронные системы и их элементы / Новосиб. электротехн. ин-т.-Новосибирск.1991.-с.14-17.
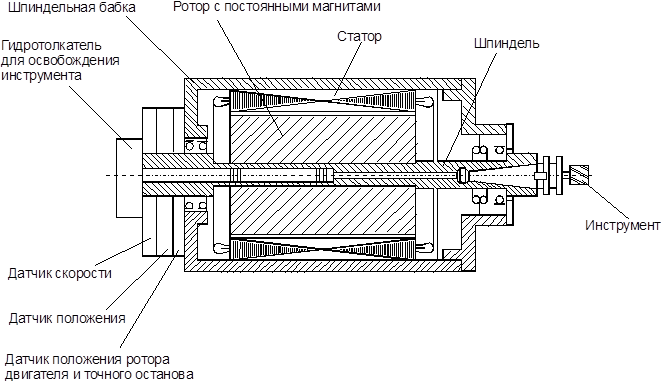
Рис.1. Безредукторный электрошпиндель.


|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|