- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Дизайн системы управления отношения и исполнительный анализ на орбите наноспутника – ‘‘Тянь Туо 1’’
Дизайн системы управления отношения и исполнительный анализ на орбите наноспутника – ‘‘Тянь Туо 1’’
Аннотация
‘‘Тянь Туо 1’’ (TT-1), наноспутник - первый наноспутник единственной платой, который был успешно запущен в Китае. Главная цель TT-1 - технологическая демонстрация и научные измерения. Спутник выполняет значительное исследование проверки выполнимости архитектуры единственного правления, и это скроено к недорогой философии, приняв многочисленные компоненты коммерческого с полки (COTS). Спутник показан со способностью трех осевой стабилизацией контроля . Колесо импульса уклона подачи и три магнитных катушки приняты как приводы контроля. Датчики солнца, магнитометры и гироскоп с тремя осями используются как датчики измерения. Методы Оценки кватерниона (ПОИСКИ) и сигма-точечного фильтра Кальмана (UKF) принят для определения положения наноспутника. Данные орбиты, полученные наземной станцией, анализирует выполнение положения и системы управления (ADCS). Результаты показывают, что дизайн ADCS для TT-1 подходит, прочен и выполним.
1. Введение
Микро и Наноспутники с такими преимуществами как небольшой объем легкий вес, короткий период развития и низкая стоимость, постепенно становятся направлением новой разработки, и привлекает все больше внимания. В течение прошлых десятилетий огромное количество исследования были направлены на научные исследования микро - и наноспутников.
6-го декабря 1957 первый Авангард наноспутника TV3 был неудачно начат, спустя только несколько месяцев после запуска первого искусственного спутникового Спутника 1. В предидущих годах, главной причиной была для микро - и наноспутники ограниченные возможностий полезного груза ракет-носителей, и запущенные спутники были разработаны и произведены просто. Спутники стали более крупными и более продвинутыми как только ракета-носитель смогла выносить больший вес,. Однако из-за развития низкой микроэлектроники управления в конце девяностых прошлого века, это обеспечило потенциальный путь к высокой эффективности по массовому отношению. К сентябрю 2009 больше чем 60 микро - и наноспутники были запущены успешно в космос, и большинство этих спутников были разработаны университетами, и главные цели этих спутников были технологическая демонстрациия, научнымые измерения и радиосвязь, такие как TNS-0, STSAT-1,2, MSU-1, TUGSAT-1/BRITE, КОМПАС 1, ZDPS-1A.
Определение положения и система управления (ADCS) играют основную роль в спутниковой операции на орбите, которая может значительно затронуть работу спутника. Развитие микро - и наноспутник требует системы управления движением, которая недорога, легка, между тем с небольшим объемом и низким потреблением энергии. Поэтому, магнитные катушки и колесо импульса уклона были приняты как самые популярные приводы . Магнитная катушка с тремя осями, объединенная с колесом импульса уклона подачи, является популярным способом достижения контроля за стабилизацией с тремя осями. Этот метод проводит в жизнь стабилизацию движения в рулоне и направлениях отклонения от курса колесом импульса, которое номинально вращается по фиксированной процентной ставке в направлении подачи спутника. Многие микро - и наноспутники, работающие в орбите сегодня, подвергают этой стратегии управления. Спутник HAUSAT-2, разработанный Space System Research Laboratory (SSRL), использует магнитный вращающий момент в качестве привода для стабилизации движения, и колесо импульса используется для быстрого контроля за демпфированием. ZDPS-1A, разработанный университетом Чжэцзяна также успешно, принимает колесо импульса и магнитные катушки как приводы и достигает точного обслуживания движения.
TT-1 - первый наноспутник одной платой в Китае, и это разработано и развито Национальным университетом Технологии Защиты. В дизайне TT-1 ADCS играет важную роль в выполнении миссий включая телеметрию и контроль, оптическое отображение, и в формировании интервалов между научным измерением. В конфигурации ADCS магнитные катушки и колесо импульса приняты как приводы , и датчики солнца, магнитометры и гироскоп с тремя осями используются как датчики измерения.
2. Обзор миссии наноспутника TT-1
2.1. Фон наноспутника TT-1
10-го мая 2012 спутник TT-1 (как показано на Рис. 1) был успешно запущен в космос от китайского Центра Запуска Спутника Тайюаня. Объем спутника составляет 425 мм · 410 мм · 80 мм, и его масса составляют приблизительно 9.3 кг. Спутник составлен из бортового компьютера (OBC), система ADCS, система телеметрии и контроля (TTC), система энергопотребления (PSM), механическая структура, система управления температурой, система выполнения команды и система полезных грузов.
С возможным применением микро - и наноспутники, архитектура постепенно развивается в направлении модуляризации и стандартизации. С точки зрения исследования новой архитектуры наноспутника TT-1 также выполнил соответствующие усилия. Спутник TT-1 - инновационный наноспутник, разработанный и разработанный при помощи специальной архитектуры. Во время дизайна и производства спутника, была получена серия ключевого прорыва. Посредством интегрированного электронного дизайна и машинного/электрического/теплового дизайна интеграции, модуль PSM, модуль OBC, модуль ADCS и модуль TTC объединены на единственную печатную плату (PCB). По сравнению с обычным спутником в TT-1 нет никакого кабельного соединения. Следовательно, новая архитектура единственного правления значительно уменьшает качество структуры и улучшает функциональную плотность. Кроме того, единственная архитектура правления хорошо масштабируемая и может быть расширена до стандартизированного и универсального, функционального модулья.
TT-1 был также разработан, чтобы провести первый эксперимент основанной на спутнике автоматической идентификационной системы (AIS) в Китае и провести научные эксперименты обнаружения атомарного кислорода (AO), а также оптического отображения. Жизненный цикл был первоначально разработан в течение 30 дней. Однако до сих пор спутник работает на орбите больше одного года. Кроме того, это изобразило первую карту AIS глобального судна в Китае. Целая миссия - полный успех.
Таким образом, основные миссии TT-1 следующие:
(1) Проверка архитектуры наноспутника единственного правления.
(2) Демонстрация на орбите компонента AIS.
(3) Эксперимент компонентов/модуля.
(4) Оптическое земное отображение.
(5) Эксперимент обнаружения космического пространства.

Рис. 1 впечатление на орбите от TT-1.
2.2. Схема ADCS
ADCS - решающая подсистема в процессе проектирования наноспутника. Его характеристика непосредственно затрагивает электроснабжение и контроль за телеметрией. Колесо импульса установлено на оси наклона и обеспечивает гироскопическую жесткость для оси вращения и стабилизации отклонения от курса. Магнитная катушка, установленная на оси наклона, разработана как кольцо из жесткого подшива в этом направлении, и другие две магнитных катушки разработаны как железная конфигурация обработки. Из-за небольшого объема и низкого потребления энергии TT-1, колесо импульса разработано, чтобы вращаться по фиксированной скорости без контроля скорости . Датчики измерения включают в себя датчики солнца, магнитометры и гироскоп с тремя осями. Структура ADCS показано на Рис. 2.
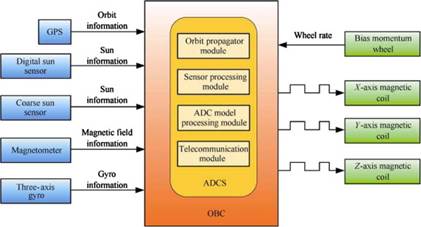
Рис. 2 структура ADCS.
3. Устройства аппаратных средств ADCS для TT-1
3.1. Определение движения и цели контроля
ADCS начинает работать после того, как TT-1 отделяется от ракеты-носителя, и она должна совершить несколько целей во время жизни спутника.
(1) После разделения от верхней ступени пусковой установки ADCS должен автоматически запуститься и воспользоваться начальным состоянием движения.
(2) Выводить начальную угловую скорость с магнитными катушками с тремя осями.
(3) Чтобы определить угловое движенние спутника и угловая скорость с магнитометром и датчиком солнца, используя метод сигма точечного Фильтра Калмана.
(4) Достигнуть тремех осевой стабилизации вращения низкой точке .
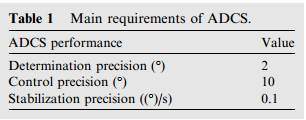
Главные эксплуатационные требования ADCS показано в Таблице 1.
3.2. Архитектура аппаратных средств ADCS
Датчики и приводы - критические части для ADCS. В этом подразделе датчики и приводы , используемые на TT-1, ознакаливают , с такими как датчики солнца, магнитометры, колесо импульса и магнитные катушки. Магнитометры и датчики солнца разработаны, чтобы получить векторные измерения. Датчики солнца измеряют вектор угла обзора от космического корабля до солнца, и магнитометры измеряют местный вектор магнитного поля. Магнитные катушки производят вращающий момент контроля, взаимодействуя с магнитным полем, и колесо импульса стабилизирует движение посредством производства углового момента с гироскопической жесткостью.
3.2.1. Цифровые датчики солнца
Два цифровых датчика солнца (DSSs) отобраны для системы определения движения TT-1, как показано на Рис. 3. DSS может определить угол между нормальным направлением солнечной батареи и вектором солнца. В текущем дизайне два цифровых датчика солнца установлены отдельно вперед +X-оси и +Y-оси. Справочную структуру тела показывают на Рис. 4. Датчики выносливые к земному альбедо в более низкой земной орбите (LEO) под широким спектром условий освещения. Датчик имеет ±60 · ± 60 освещений поля зрения и точность измерения находятся в диапазоне 0.5.

Рис. 3 Цифровой датчик солнца.
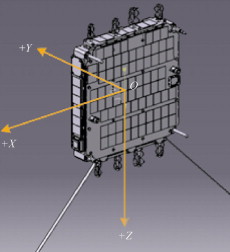
Рис. 4. Справочная структура Тела.
Каждый датчик потребляет меньше чем 0.1 Вт мощности. Положение проектирования вектора солнца варьируется из-за угла инцидента солнечного света. Датчик солнечного света установлен в плоскости проектирования и может произвести текущий сигнал согласно углу уровня солнечного света. После того, как спутник превращается в режим управления стабилизации с тремя осями, угол между +Y-оси и вектор солнца приближается к 60. Таким образом солнечный свет появится на краю области видения датчика, как только спутник выходит из затмения. Обратите внимание на то, что датчик с более низким угловым измерением будет отобран для определения движения, если оба датчика получат информацию измерения.
3.2.2. Крупные датчики солнца
Помимо цифровых датчиков солнца, крупный датчик солнца установлен на поверхности +Z. В то же время солнечные батареи, используя соединение солнечных батарей Арсенида Галлия, установленных на ±X, ±Y и поверхности Z, также используются, чтобы измерить вектор солнца. Солнечные батареи производят ток как функцию интенсивности света и угла уровня к источнику света. Отношения между фототоком и интенсивностью солнечного света могут быть, описывают кривой косинуса. Таким образом каждая часть солнечной батареи может быть равна крупному датчику солнца, и по крайней мере один крупный датчик солнца может обнаружить солнечный свет во время периода солнечного света. С диспетчером мощности, установленным на спутнике, угол инцидента солнечного света может быть вычислен через обнаружение текущего создания солнечными батареями. Однако из-за температурного эффекта и шумов измерения, этот метод не может получить высокую точность измерения. Таким образом крупные датчики солнца применены как избыточные датчики, чтобы гарантировать надежность.
3.2.3. Гироскоп
Датчик гироскопа для TT-1 составлен из трех гироскопов вдоль трех осей. Каждый гироскоп может измерить угловую скорость вокруг единственной оси. Динамический диапазон каждого гироскопа ±75 (0)/s с диапазоном температур 40 0C к 85 0C. Точность измерения датчика гироскопа находится в диапазоне 0.5 (0)/s. Из-за низкой точности измерения, гироскоп с тремя осями применяется для оценки угловой скорости в момент отделения и используется, чтобы оценить правильность алгоритма контроля демпфирования.
3.2.4. Магнитометры
Магнитное поле - другой эффективный вектор для определения движения, и это - главный справочный вектор для определения движения в затмении. Магнитный составляющий вектор в каркасе кузова получен непосредственно из магнитометров. Два магнитометра с тремя осями (ШОТЛАНДСКИЕ БЕРЕТЫ) установлены на спутнике, чтобы измерить магнитный вектор. Главный магнитометр, отобранный для TT-1, является коммерческим магнитометром, разработанным Honeywell, как показано на Рис. 5. Его диапазон измерения - от 2 G до 2 G с точностью 6.7 нТл. Есть другой магнитометр, установленный в гироскопе. Однако из-за низкой точности измерения, этот магнитометр применен как избыточное устройство. Как только главный магнитометр не может работать, избыточный магнитометр занял бы место как датчик магнитного поля.
3.2.5. Колесо импульса
Колесо импульса уклона передачи используется как привод контроля за движением для TT-1, как показано на Рис. 6. В конструкции колесо импульса состоит из маховика, имеющий двигатель электропривода и сборки. Есть также электроника для приведения в действие колеса, управления и измерения скорости колеса. Колесо основано на микродвигателе DC. Двигатель способен к достижению до 8200 r/мин, в зависимости от поставки напряжения с номинальным вращающим моментом 6.92 mN * m/A, и фиксированная процентная ставка составляет приблизительно 6100 r/мин. Момент колеса инерции 1.4 · 10-5 кг * m2 с 42 мм в диаметре и 6 мм в толщине.
Колесо импульса установлено вдоль Оси Y, и это будет производить угловой момент непрерывно. Колесо импульса предоставляет стабилизации Оси Y гироскопический эффект и достигает Оси Y по нормальному указанию плоскостьа орбиты.
3.2.6. Магнитные катушки
Активный магнитный контроль разработан для TT-1. Три магнитных катушки установлены вдоль трех оси инерции. Две магнитных катушки, разработанные в железной конфигурации обработки, установлены вдоль Оси X и Оси Z, и магнитное кольцо установлено вдоль Оси Y из-за точного объема, как показано на Рис. 7. Магнитное кольцо построено с 510 поворотами медного провода и может обеспечить максимальный диполь 1.2 A/m2. Максимальный диполь, обеспеченный железным зерном магнитная катушка, является 2 A/m2.
От Рис. 7 можно заметить, что магнитометр расположен близко к магнитным компонентам, таким как двигатели и магнитные катушки. Чтобы улучшить точность измерения магнитометра, магнитные катушки работают в различных периодах времени с магнитометром. Однако из-за потребности получения сильного магнитного поля с маленьким устройством, высокий магнитный материал проходимости эксплуатировался как ядро катушки, и это приведет к серьезному эффекту на магнитометр. Таким образом положение магнитометров также рассмотрели с оптимизацией. Чтобы уменьшить эффект остатка магнитных катушек, магнитометр установлен в по диагонали направление магнитных катушек. Кроме того, наземные испытания ШОТЛАНДСКОГО БЕРЕТА и калибровка перед запуском введены, чтобы улучшить точность измерения магнитометра.

Рис. 5 Главный магнитометр.

Рис. 6. Колесо Импульса
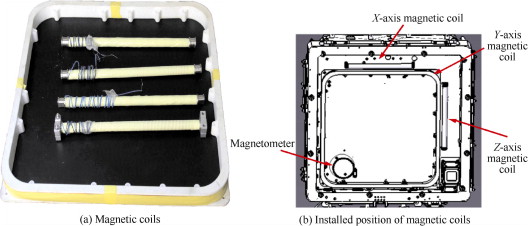
Рис. 7 Магнитные катушки и установленное положение.
4. Определение отношения и алгоритм контроля для TT-1
В этой секции мы введем алгоритмы, используемые на TT-1, чтобы оценить и управлять его отношением с датчиками и приводами . Во-первых, мы вводим уравнение динамики отношения для спутника, и затем мы представляем определение отношения и управляем алгоритмом, соответственно.
4.1. Динамика отношения
Динамика отношения твердого космического корабля с колесами мухи может быть описана как

где wbi - угловая скорость, выраженная в справочной структуре тела, J матрица инерции, H угловой момент колеса импульса, Tc вектор вращающего момента контроля, произведенный приводами , Td внешний вектор вращающего момента волнения, наложенный на спутник, wbix искажение - симметричная матрица, wbo угловая скорость относительно справочной структуры орбиты, выраженной в справочной структуре тела, woi орбитальная угловая скорость, выраженная в справочной структуре орбиты и Або матрица преобразования от справочной структуры орбиты до справочной структуры тела.
4.2. Определение отношения
Спутниковое отношение обычно выражается в форме углов Эйлера или матрице косинуса направления кватерниона. Кватернион - также популярная форма, чтобы выразить отношение. Ученые предложили много методов, чтобы оценить отношение, и различные методы были применены на спутниковую миссию успешно. В миссии TT-1 есть различные методы, принятые для определения отношения. После разделения запуска начальное состояние отношения было неизвестно. Таким образом оценщик кватерниона (ПОИСКИ) алгоритм был принят для определения отношения. Однако, как только спутник превратился в режим управления стабилизации с тремя осями, метод ПОИСКОВ обеспечит начальное состояние отношения для метода фильтра, и методом ПОИСКОВ заменил бы алгоритм недушистого фильтра Кальмана (UKF), поскольку точность определения отношения ПОИСКОВ не была благоприятна.
4.2.1. Алгоритм ПОИСКОВ
Алгоритм ПОИСКОВ и определение отношения с тремя осями (ТРИАДА) алгоритм являются обычно используемыми детерминированными алгоритмами для определения отношения. Они - оба решения проблемы Уохабы. ПОИСКИ и алгоритм ТРИАДЫ были оба использованы успешно на наноспутнике. Например, наноспутник ИОНА (подведенный запуск) запланировал использовать алгоритм ТРИАДЫ с магнитометром и измерениями датчика солнца. Cute-1.7+APD II, развитые Лабораторией для Космических Систем в Технологическом институте Токио, использовали алгоритм ПОИСКОВ на борту, чтобы оценить отношение. Из-за низкого бремени вычисления ПОИСКОВ, TT-1 принял его, чтобы захватить начальное отношение с магнитометром и измерениями датчика солнца. Обратите внимание на то, что, как только эти два вектора параллельны, измерения, полученные наконец, временной интервал будет сохранен, пока непараллельные векторы не получены.
4.2.2. Алгоритм UKF
Алгоритм UKF используется для определения отношения в фазе стабилизации с тремя осями. Вектор состояния X объединений кватернион отношения qbo и wbi. Системное уравнение состояния состоит из синематики и уравнений динамики, и может быть описано следующим образом:

где m1 и m2 представляют Гауссовские белые шумовые последовательности.
Точность оценки отношения зависит от точности всех датчиков. Модель измерения настроена с вектором магнитного поля Bbo и вектор солнца Sbo. Модель измерения в солнечном свете описана следующим образом:

где Bg и Si - магнитное поле и вектор солнца, описанный в географической структуре и инерционной структуре, соответственно. Aoi - матрица преобразования от инерционной структуры до структуры орбиты, и Aig - матрица преобразования от географической структуры до инерционной структуры. vb и vs против представляют Гауссовские белые шумовые последовательности. Как только орбита спутника находится в затмении, эффективные векторы солнца не могут быть получены датчиками солнца. В это время только ШОТЛАНДСКИЙ БЕРЕТ может быть получен как вектор измерения. Больше деталей алгоритма UKF представлено в Касательно.
4.3. Контроль за отношением
В TT-1 три магнитных катушки, объединенные с колесом импульса уклона подачи, разработаны, чтобы достигнуть спутникового контроля за отношением. В этом подразделе, и заглушающем контроль и алгоритмы контроля за стабилизацией с тремя осями, описаны подробно.
4.3.1. Демпфирование контроля
После разделения запуска спутник принят в случайном начальном состоянии отношения с большой угловой скоростью. В этой фазе только магнитометр может использоваться в качестве датчиков, и магнитные катушки используются в качестве главных приводов для контроля за демпфированием отношения. Главная цель этой фазы состоит в том, чтобы уменьшить угловую скорость с магнитными катушками.
Метод B-точки - самый популярный алгоритм в этой фазе из-за ее быстрой сходимости и низкого бремени вычисления. Однако метод B-точки сильно затронут шумом измерения магнитометра. Чтобы улучшить точность контроля, угол между составляющим вектором в Y-axis и Bbo во-первых определен следующим образом:

где Основной обмен, и Bz - составляющие векторы Bbo в Оси X, Оси Y и Оси Z, соответственно.
Производное число времени @y вычислено измерением магнитометра в каждом типовом временном интервале:

Контроль за демпфированием разделен на две фазы.
Фаза 1: Свалите угловую скорость Оси X и Оси Y с магнитными катушками в Оси Y, и установите состояние стабилизации Y-Thomson. Между тем Ось Y ведут к нормальному направлению плоскостьа орбиты. Составляющий вектор дипольного момента M в Оси Y представлен следующим образом:

где ky - выгода контроля.
Фаза 2: Свалите угловую скорость Оси Y с Осью Z или Осью X магнитная катушка к ссылке угловая скорость wref. Составляющий вектор M в Оси X или Оси Z представлен следующим образом:

где wy - угловая скорость Оси Y, и kx и kz - прибыль контроля.
4.3.2. Контроль за стабилизацией с тремя осями
После фазы демпфирования контроля закон управления пропорциональной производной (PD) принят, чтобы приспособить спутник к желаемой ориентации. Закон управления магнитных катушек

где Kp, Kq - содействующая матрица прибыли контроля. Ө = [ф, ө, ү] T представляет угол отношения, и ф, ө и ү представляют рулон, подачу и угол отклонения от курса, соответственно.
Как известно, дипольный момент M магнитных катушек взаимодействует с геомагнитной областью Б, чтобы произвести вращающий момент контроля:

Ограничение, продиктованное магнитными катушками, состоит в том, что Tc только производит в ортогональном направлении с магнитным полем B. Следовательно, лучший закон управления, примененный на магнитный дипольный момент,

4.3.3. Безопасный режим управления
Безопасный режим управления очень важен в процессе контроля за отношением. Однажды разъедините неудачу, происходит, или электроснабжение не достаточно, спутник превратится в безопасное состояние режима управления. Согласно данным, хранившим в энергонезависимой памяти, это государство может быть введено любой фазой. Как только спутник возвращает энергию власти, система перезапустит. Условия для каждого способа, чтобы переключиться показывают на Рис. 8. Условия выключателя для каждого режима управления показывают в Таблице 2.
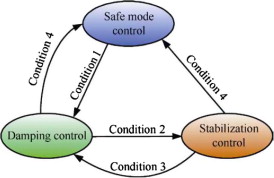
Рис. 8 Блок-схема контроля за отношением.
5. Анализ данных на орбите
В этой секции данные, полученные наземной станцией, используются, чтобы проанализировать ADCS исполнение на орбите TT-1. Спутник работает в синхронной орбите солнца с высотой 480 км, оригинальностью 0.000454 и углом склонности 97.30. Исполнения демпфирования фазы и фазы стабилизации проанализированы, соответственно. Можно прийти к заключению, что точность контроля с тремя осями - приблизительно ±100, и точность обращения низшей точки может быть ограничена в пределах ±50.
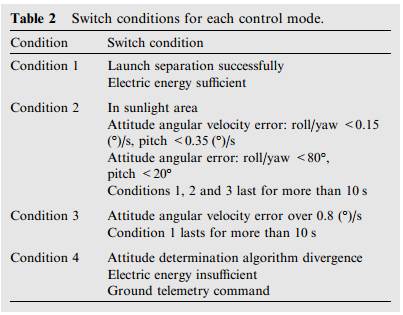
5.1. Демпфирование фазы
Цель этой фазы состоит в том, чтобы уменьшить угловую скорость со стратегией управления демпфирования. Рис. 9 (a) ясно показывает отношению угловую скорость после успешного разделения запуска. От Рис. 9 (a) мы видим, что отношение угловая скорость после разделения было в пределах 1.5 (0)/s. Это демонстрирует, что дизайн разделения очень успешен. Рис. 9 (b) показывает скорость колеса импульса. После разделения колесо импульса убыстрилось быстро и стабилизировалось по фиксированной процентной ставке в 10 с. Рис. 9 (c) показывает состояние контроля после разделения. От Рис. 9 (c) можно заметить, что режим управления был успешно изменен от демпфирования контроля к контролю за ФУНТОМ. Контроль за демпфированием был с 7:19:52 до 7:20:13, который только продлился в течение 21 с. Фаза демпфирования коротка и незаметна из-за маленькой угловой скорости после разделения. После этого состояние контроля за отношением превратилось в контроль за стабилизацией. Рис. 9 (d) показывает отношению угловую скорость во второй орбите. Очевидно, что отношение угловая скорость было ограничено в пределах 0.12 (0)/s. Кроме того, отношение угловая скорость wx в Оси X и отношении угловая скорость wz в Оси Z сходилось к диапазону ±0.06 (0)/s. Это демонстрирует, что алгоритм контроля за демпфированием эффективный и подходит для наноспутника TT-1.
5.2. Фаза стабилизации с тремя осями
После демпфирования фазы контроля спутник превратился в режим управления стабилизации с тремя осями. Во-первых, исполнение этой фазы в области солнечного света проанализировано. Как показано на Рис. 10, период времени с 6:50:18 до 6:54:29, 14-го мая 2012 UTC От Рис. 10 (a), мы можем прийти к заключению, что угол отношения с тремя осями был ограничен в пределах ±60, в то время как угол подачи был ограничен в пределах 30. Кроме того, это ясно, что угол подачи был более стабильным, чем угол вращения и угол отклонения от курса. Таким образом можно прийти к заключению, что контроль за колесом импульса в оси подачи эффективный. От Рис. 10 (b) можно заметить, что отношение, угловая скорость рулона и оси отклонения от курса сходилась к диапазону ±0.06 (0)/s, и подача угловая скорость, было ограничено в пределах ±0.12 (0)/s. Между тем скорость колеса была стабильна приблизительно в 6100 об/мин, как показано на Рис. 10 (c). Поэтому, можно прийти к заключению, что исполнение ADCS удовлетворяет в области солнечного света.
Исполнение ADCS в затмении показывают на Рис. 11. Период времени с 17:36:14 до 17:37:22, 23-го мая 2012 UTC. В то время спутник посылали в космос больше 10 дней. В затмении датчик солнца не может произвести эффективную информацию для определения отношения, и только магнитометр был получен как вектор измерения. Таким образом работа ADCS в затмении была бы хуже, чем это в области солнечного света. От Рис. 11 это может быть получено, что абсолютные величины всех трех угловых ошибок отношения были ограничены в пределах 200, и угловая ошибка отношения подачи была приблизительно 50 с медленными изменениями. Между тем угловая скорость отклонения от курса и продольной оси была ограничена в пределах 0.1 (0)/s, и скорость отношения подачи была ограничена в пределах 0.12 (0)/s. Поэтому, мы можем получить это, ADCS может также работать эффективно даже в затмении, и спутник - также конюшня с тремя осями. Однако по сравнению с работой в области солнечного света, точность контроля в затмении намного хуже.
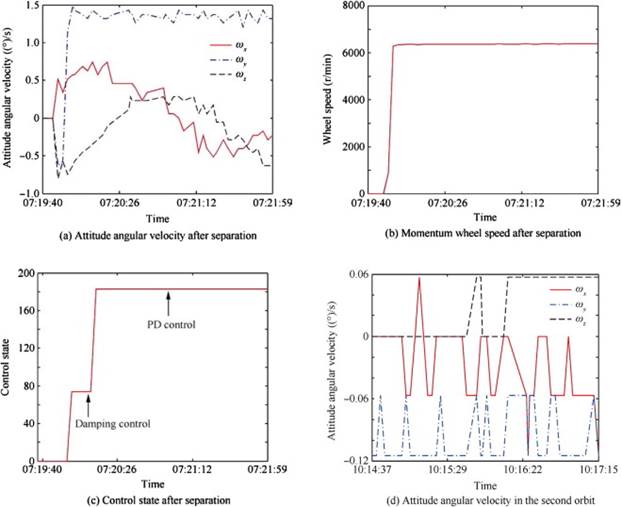
Рис. 9 Демпфирование фазы.
Рис. 10 Данные на орбите во время контроля с тремя осями в солнечном свете.
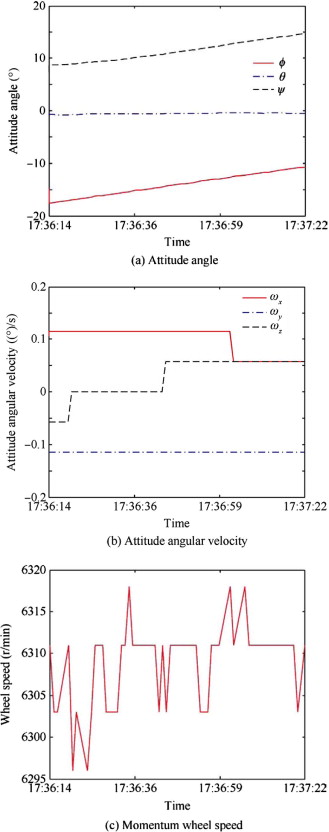
Рис. 11 Результаты на орбите во время фазы стабилизации с тремя осями в затмении.
5.3. Оптическое отображение камеры
Оптическое отображение было одной из самых популярных миссий на орбите для микро - и наноспутники, и это основано на хорошей работе контроля за отношением. TT-1 оборудован укрепленным коммерческим модулем камеры для оптического отображения. Максимальное пиксельное разрешение изображения 640 · 480 (JPEG), и измельченная резолюция приблизительно 2 км, как показано на Рис. 12. Из картины можно прийти к заключению, что камера в состоянии захватить Землю, которая доказывает, что ADCS для TT-1 подходит и эффективный.

Рис. 12 Изображение Земли обрисовывает в общих чертах от камеры TT-1.
6. Заключение
TT-1 был на орбите больше одного года, который далеко превышает одну продолжительность жизни месяца, и это завершило все миссий успешно. Как первый наноспутник единственного платы правления в Китае, TT-1 проверяет структуру единственного правления и не реализовывает кабельного соединения.
В этой статье дизайн подсистемы ADCS представлен подробно, и ее работа на орбите проанализирована. Согласно оригинальным данным о телеметрии, можно прийти к заключению, что начальный дизайн ADCS для TT-1 подходит и выполним. В области солнечного света точность обращения низшей точки отношения в пределах 5, который лучше, чем разработанная точность 10. В затмении ADCS может также работать эффективно. Благоприятное отношение управляет гарантиями исполнения обильное электроснабжение и оптическое воображение.
Для дальнейшего исследования больше предложений может быть завершено посредством исполнительного анализа на орбите миссии TT-1. Чтобы получить точный контроль за движением, колесо импульса переменной скорости или метод управления колес реакции с тремя осями должны быть приняты во внимание. Кроме того, звездные датчики, как могут полагать, улучшают работу ADCS в затмении.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|