- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
HSMD 1909 перевод
HSMD 1909 перевод
ПЕРЕВОД
Вступление.
Представляя Систему механической демонстрации «Хорнби», мы постарались предоставить экономичную и в то же время очень эффективную серию аппаратов для демонстрации основных элементарных основ механики и механики. Схема предназначена для удовлетворения требований обычных начальных школ, хотя она никоим образом не ограничивается таким приложением. Нынешние модели, используемые в преподавании механики, например, в вечерних и средних школах, очень дороги. В таких моделях для проведения данного урока используется одна часть устройства, и только она, в результате чего для покрытия чего-либо подобного надлежащей территории стоимость необходимого устройства очень высока.
С помощью системы «Хорнби» модель можно разбирать на части, а части использовать для построения других моделей; Опять же, учащийся, создавая свои собственные, развивает свои конструктивные способности, и вместо того, чтобы просто использовать уже хорошо законченный предмет, он делает свой предмет из стандартных частей, его умение собирать части вместе в некоторой степени является мерой успех его успехов его последующих экспериментов с аппаратом. Экспериментальные модели, построенные из частей системы «Хорнби», будут иметь такую же высокую степень точности, как и аппаратура, стоящая во много раз дороже.
При разработке этих моделей было предпринято все возможное, чтобы сделать каждого бота простым в конструкции и эффективным в качестве демонстрации некоторых важных принципов. Мы надеемся на дальнейшее развитие схемы путем введения со временем дополнительных моделей и улучшения наших существующих. Вряд ли нужно говорить о том, что предложения учителей и других людей будут нами приняты и приветствуются.
Мы ввели три отдельных комплекта одежды, чтобы соответствовать требованиям трех высших стандартов начальной школы. Раздел «А» относится в основном к строительным работам и предназначен для демонстрации таких идей, как раскосы, строительство балок, строительство стропильных ферм, соединение плит и т. Д. Раздел «Б» представляет собой ряд простых подвижных частей в двигателях; в то время как раздел «C» предназначен для того, чтобы дать возможность изучать элементарные законы механики. Перфорированная опорная плита, поставляемая с каждым комплектом системы «Hornby», будет очень полезна в качестве основы для создания многих моделей.
1
К иллюстрации каждой модели прилагается краткое описание, которое позволит построить модели. Надеемся, что иллюстрации будут достаточно полными, взятыми вместе с этими описаниями, чтобы предотвратить любые трудности, возникающие при построении различных примеров.
Все детали в этой экипировке стандартизированы, и в любой момент можно приобрести новые, чтобы заменить те, которые были утеряны или повреждены. Полоски перфорированы с отверстиями на одинаковом расстоянии; оси подходят для любых отверстий, и их положение в различных моделях всегда можно определить, посчитав отверстия.
Каждая деталь была специально изготовлена, отобрана и протестирована для использования в научных целях, и была достигнута высокая степень точности и отделки. Мы обязуемся заменять и прошлое, которые по какой-либо причине не считаются удовлетворительными при покупке у нас.
При заказе дополнительных паспортов всегда следует указывать, что они предназначены для использования с системным комплектом «Hornby».
2
РАЗДЕЛ A. Диагональная стяжка модели 1 для рамы.
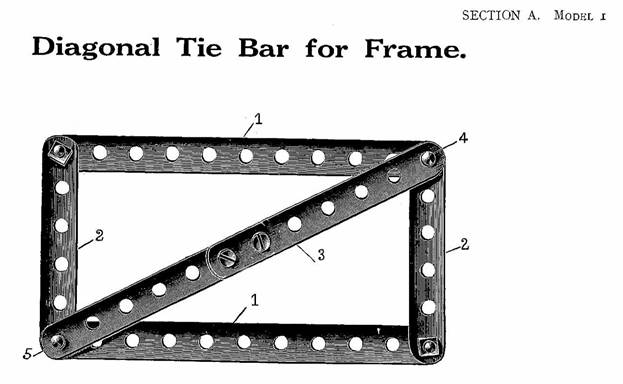
Цель этой модели - указать на ценность диагональной стяжки в предотвращении стеллажа сборного каркаса. Модель рамы сначала должна быть изготовлена из четырех полос 1 и 2, закрепленных болтами по углам. Затем следует отметить, как эта конструкция легко рухнет или закроется, если ее оставить в простой форме каркаса. Теперь композитная полоса 3 должна быть сконструирована из двух меньших перфорированных полос, длина которых ровно достаточна для того, чтобы соответствовать от верхнего углового болта 4 каркаса к противоположному угловому болту 5. При размещении этой полосы 3 по диагонали поперек каркаса и над болтами 4 и 5, будет обнаружено, что рама стала довольно жесткой и защищена от любой возможности сдвигания или закрывания.
3
РАЗДЕЛ A. Модель 2 Применение диагональной привязки к воротам.
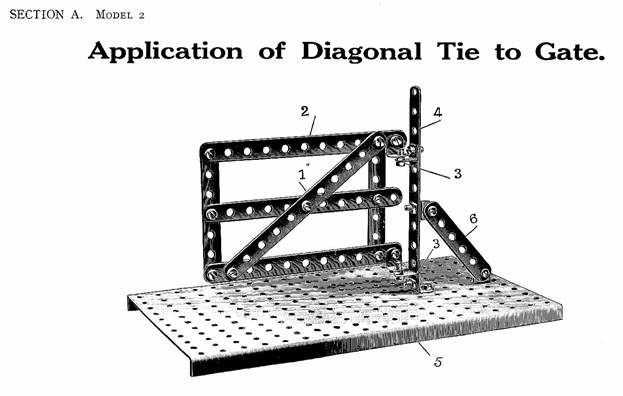
Это показывает применение принципа, выявленного в предыдущей модели, при этом диагональная полоса 1 во вращающемся затворе 2 расположена таким образом, чтобы предотвратить раскачивание. В этом случае диагональная связь также служит опорой для внешнего свисающего веса даты. Игру поворачивают на болтах 3 в кронштейнах, переносимых с вертикальной планки 4 и закрепленных на перфорированной пластине 5. Стойка 6 должна крепиться болтами к стойке 4 и основанию.
4
РАЗДЕЛ A. Угловой кронштейн, модель 3.
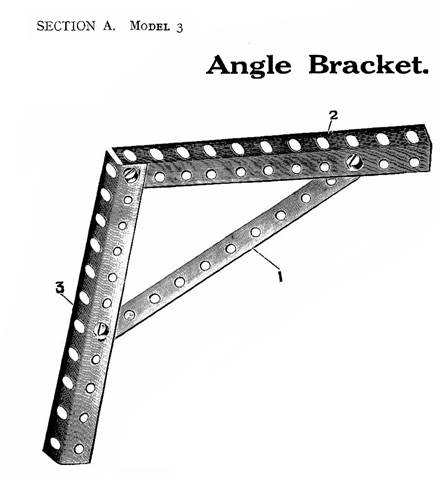
В данной модели представлен угловой кронштейн обычного типа. Стойка 1 поддерживает горизонтальную 2 кронштейна от вертикального элемента 3. Детали 2 и 3 кронштейна изготовлены из угловых полос, как показано, для придания жесткости.
5
РАЗДЕЛ A. Простая ферма крыши, модель 4.
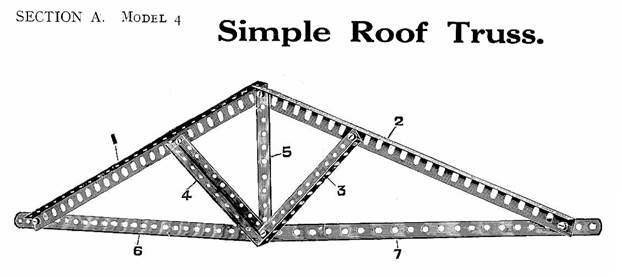
Эта модель представляет собой простую ферму крыши. При построении этого примера следует отметить, что части 1, 2, 3 и 4, которые используются для противодействия силам сжатия или выталкивания на балку, изготовлены из угловых полос, а части 5, 6 и 7 , которые просто находятся в напряжении, изготавливаются из обычных плоских полос. Такая конструкция уголков для упорных стержней и плоских стержней или стержней для растянутых стержней всегда применяется при производстве металлических конструкций.
6
РАЗДЕЛ A. Сборная ферма модели 5.
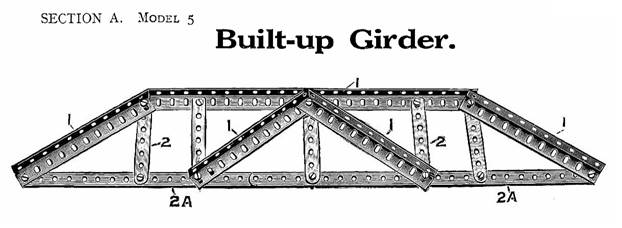
В этом примере показан простой тип сборной фермы. Диагональные части балки и верхнего элемента выполнены под углом 1, а вертикальные элементы 2 и нижние горизонтальные части 2а выполнены из плоских полос. В этом отношении следует отметить, что верхняя стрела балки, такая как 1, всегда находится в сжатом состоянии и, следовательно, должна быть жесткой, а нижняя стрела, такая как 2а, натянута и, следовательно, нуждается только в плоской стяжке.
7
РАЗДЕЛ A. Модель 6 Прямоугольный железный каркас.
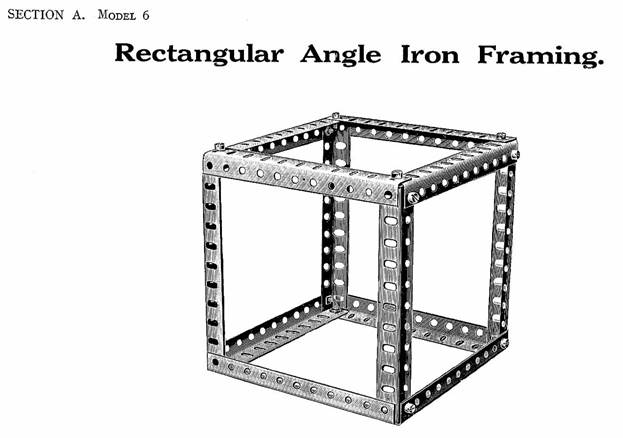
Этот пример предназначен для иллюстрации конструкции каркаса резервуара, при этом угловые рамы проходят через угловые балки, к которым впоследствии крепятся болтами боковые пластины. В реальной инженерной практике, конечно, все уголки и боковые стороны скрепляются заклепками.
8
РАЗДЕЛ A Башня с опорами, модель 7.
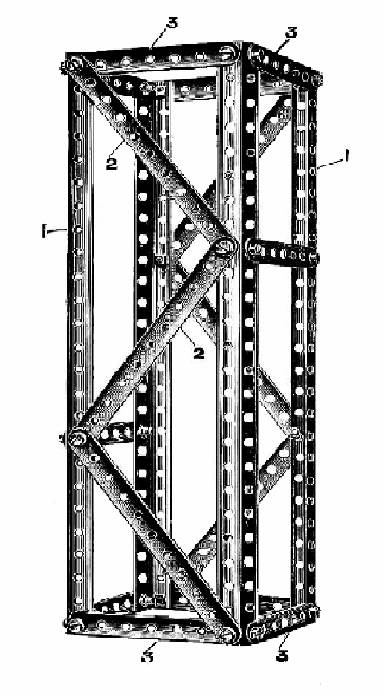
В этом примере, который может представлять собой один из опорных кранов, угловые элементы 1, которые выдерживают сжатие собственного веса конструкции и должны быть жесткими против любой вероятности изгиба, изготовлены из угловых балок, а диагональные полосы Соединение угловых элементов вместе необходимо выполнять только из плоских полос 2, при этом верхний и нижний концы угловых балок 1 скрепляются вместе с помощью полос 3. Следует отметить, что диагональные распорки 2, используемые для предотвращения раскачивания, расположены в шахматном порядке или чередуются. с противоположных сторон.
9
РАЗДЕЛ A Козелок модели 8.
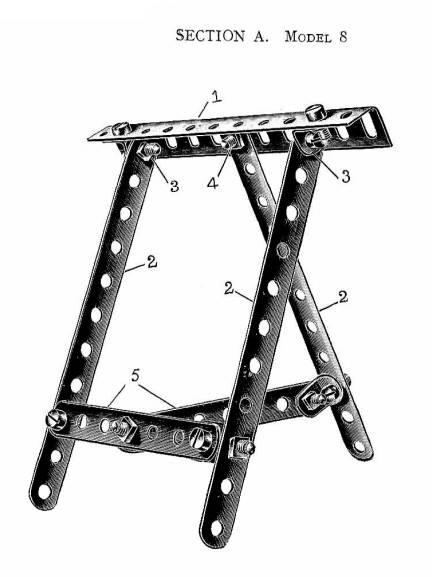
Эта модель представляет собой эстакаду, которая обычно используется для временной поддержки скамейки и т.п. Верхняя угловая балка 1 поддерживается тремя стойками 2, которые прикреплены болтами к верхней балке угловыми скобами 3 или прямыми, как в позиции 4, при этом нижние планки 5 расположены так, чтобы образовывать рельс-тройник, жестко удерживающий стойки в нужном положении. Следует отметить, что конструкция такого типа очень прочная.
10
РАЗДЕЛ A. Ленивые щипцы модели 9.
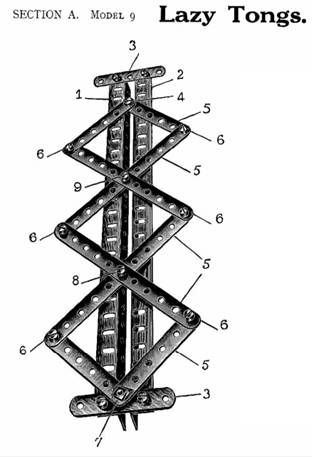
Эта модель послужит иллюстрацией принципа ленивых щипцов. Две угловые балки 1 и 2, связанные на концах короткими полосами 3 от направляющего кольца для свободно движущегося стержня болта 4. Ключ состоит из ряда диагонально расположенных полос 5, скрепленных вместе на их внешних концах 6, концевой болт 7 клещей прикреплен к нижним поперечным планкам 3, таким образом прикрепляя к ним клещи. Под планками в точке 7 установлены распорные гайки. Следует обратить внимание на то, что первый центральный болт 8 не перемещается так быстро по пазу, как второй центральный болт 9, в то время как перемещение этого последнего болта снова превышается. с помощью крайнего болта 4. Это можно проверить путем подсчета количества отверстий в направляющих полосах, пройденных каждым из рассматриваемых болтов. Контргайки необходимы на всех болтах 6, 8, 9 и 4.
11
РАЗДЕЛ A. Модель 10 H Gilder.
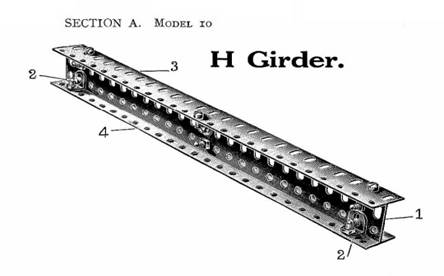
В этом примере показана конструкция двутавровой балки из частей системы «HORNBY», состоящих из плоских двойных полос. Вертикальная стенка 1 балки прикреплена болтами с помощью угловых кронштейнов 2 к верхней и нижней стрелам 3 и 4. Перед тем, как приступить к работе, желательно сделать эту модель, чтобы три двойные полосы 1, 3 и 4 были плоско соединены вместе. и один на другой. Затем поддерживайте их с каждого конца. При нажатии полос в центре внимание будет обращено на слабость балки, сделанной из трех полос, наложенных таким образом. После того, как балка построена, ее следует испытать таким же образом, как только что описанный, с опорой на концы, когда повышенная жесткость и прочность такого же количества материала будет сразу же замечена при размещении в правильной форме балки.
12
РАЗДЕЛ A. Соединение пластин модели 11 под прямым углом.
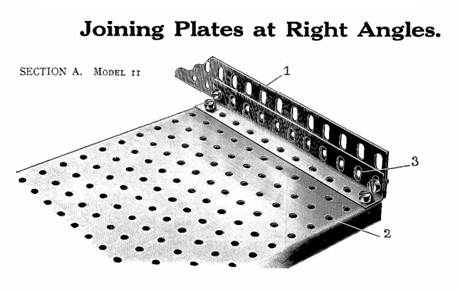
Эта модель иллюстрирует способ соединения двух пластин 1 и 2 под прямым углом с помощью угловой балки 3; Конечно, в реальной конструкции пластины 1 и 2 фактически приклепаны к уголку 3. Такой способ соединения пластин часто используется в резервуарах и подобных ситуациях, и он образует очень удовлетворительное соединение.
13
РАЗДЕЛ A. Стыковое соединение модели 12 с тройником.

Здесь показан метод стыкового соединения двух пластин 1 и 2 с помощью тройника 3. Эта форма соединения используется там, где требуется жесткость соединения, например, во многих классах соединений котла.
14
РАЗДЕЛ A. Модель 13 Соединение пластин внахлест.
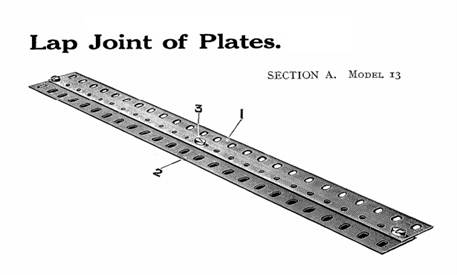
Это представляет собой обычное соединение внахлестку, при этом пластины 1 и 2 просто соединяются внахлест и прикручиваются болтами t 3. Такая форма обычно используется в более простых соединениях конструкции котла, при этом болты 3 заменяются заклепками. Окружные соединения в котле - это соединения внахлест, продольные соединения обычно стыковые.
15
РАЗДЕЛ Б. Модель 1 Пантограф.
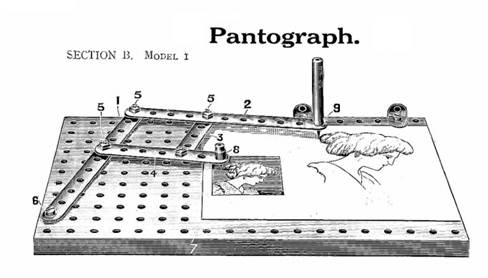
С помощью этой модели будет видно, как прослеживаются несколько локусов. Короткая 1 крепится на 2 к перфорированной кровати пластине таким образом, что полоса 1 может быть вращалась вокруг болта 2, расстояние гайки быть установлена под полосой для этой цели, и стопорная гайка на противоположной стороне тарелка. Длинная полоса 3 прикручена к полосе 1 позицией 4, угловой кронштейн 5 также закреплен тем же болтом; поворотный глаз элемент 6 поворачиваются к кровати пластине таким образом, что полоса 3, так как коленчатые 1 вращается, может скользить взад и вперед через этот окуляр. При вращении кривошипа 1 полоса 3 втягивается в поворотную направляющую и выходит из нее. Если вставить карандаш в любое из внешних отверстий полосы 3, он проведет серию точек на листе бумаги, как показано; следует внимательно отметить своеобразную форму этих локусов для различного положения карандаша. Аналогичным образом можно проследить различные места на шатуне. Эти кривые полезны при проектировании шатунов.
19
РАЗДЕЛ B. Модель 5 Быстро-возвратное движение.

Это конструкция для демонстрации метода, принятого для получения быстрого возврата в различных машинах, таких как долбежные или формовочные машины. В таких станках желательно, чтобы ход резания инструмента был намного медленнее, чем ход возврата, во время которого работа не выполняется. В показанной модели полоса 1 представляет собой рычаг станка с режущим инструментом, который направляется с помощью проушины 2 на полосе 3, которая опирается на опорную плиту 4. Ближний конец полосы 1 соединен в точке 5 с колеблющейся полосой 6, которая вращается вокруг короткого стержня 7, удерживаемого в плоской полосе 8. На стержне болта, зафиксированного гайкой на этой плоской полосе, закреплено колесо 9, в которое ввинчивается полужирный вал 10. с контргайками над и под колесом. Болт 10 проходит через прорезь в полосе 6. Когда колесо 9 вращается с помощью углового кронштейна 11, болт 10 скользит взад и вперед по прорези в полосе 6, которая также колеблется вокруг своей оси. Полоска с прорезями будет найдена в системном наряде «HORNBY». Отметив, насколько конец 5 полосы 6 поездок туда и обратно вдоль опорной колеи, полосы 12, то будет видно, что когда колесо 9 вращается через одну половину, тем ближе часть своих путешествий, конец 5 из полоса 6 проходит через гораздо большее пространство, чем когда колесо 9 проходит другую или внешнюю половину своего пути. Поскольку вращение колеса 9 в долбежном или формовочном станке является постоянным, из этого следует, что скорость рычага 1 режущего инструмента изменяется при прямом и обратном ходах, то есть рычаг быстрее на обратном или нерабочем ходе.
20
РАЗДЕЛ Б. Лучевой двигатель модели 6.
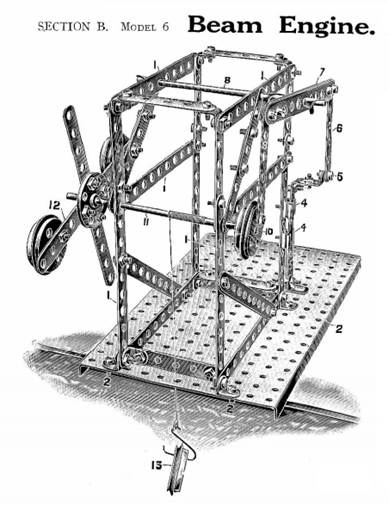
Эта модель иллюстрирует устройство старого типа балочного двигателя. Основная рама 1 работа не должна представлять какую-либо трудности в строительстве, и это болтов к кровати пластине с помощью скобок 2. полосковых 3 выполнено с возможностью вертикально ориентироваться в глазных наконечниках 4 и шарнирно крепится на 5 к шатуну 6, который, в свою очередь, прикреплен болтами к концу балки с двойной лентой, снабженной распорными гайками, колеблющимся вокруг вала 8. Другой конец балки соединен полосой 9 с фланцевым колесом 10, закрепленным на обмотке. 11. На другом конце вала 11 закреплено шпоночное колесо 12, состоящее из полос, к которым привинчены внешние грузы в виде колес с фланцами. При возвратно-поступательном движении вертикально движущейся полосы 3 балка 7 колеблется от шатуна 6, тем самым вращая колесо 10 и наматывая груз 13. Это была ранняя форма паровой машины в первых типах используемых двигателей одностороннего действия. в шахтах и подобных ситуациях полоса 3 соответствует штоку поршня.
21
РАЗДЕЛ B. Центробежный регулятор модели 7.
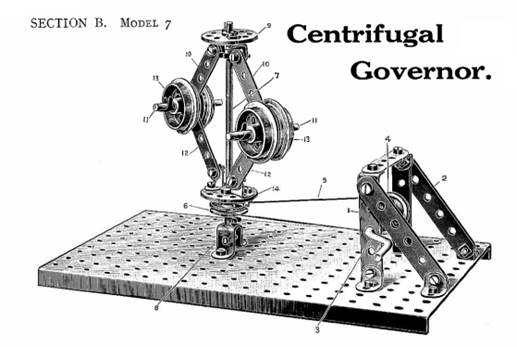
Эта модель демонстрирует основной принцип работы регулятора центробежного типа. Обмоточный кронштейн состоит из ряда плоских полос 1 и поддерживает рабочую рукоятку 3, на которой закреплен шкив 4. Этот шкив соединен ременным приводом 5 с аналогичным шкивом 6 и прикреплен к вертикальному шпинделю 7. , опирающийся на ступенчатый подшипник 8, образованный из двойной гнутой полосы. Вверху шпинделя 7 закреплено втулочное колесо 9, с которым соединены два уголка, и на этих угловых кронштейнах шарнирно закреплен верхний 10. Короткие шпиндели 11 проходят через концы этих звеньев 10 и через концы звеньев. нижние звенья 12, колеса 13, соответствующие весу шариков обычного регулятора, удерживаются на шпинделях 11 шпонками. Нижние концы звеньев 12 прикреплены болтами к кронштейнам на нижнем колесе 14 втулки, это нижнее колесо 14 может свободно перемещаться по шпинделю 7. При вращении кривошипа 3 обнаруживается, что грузовики 13 имеют тенденцию летать. наружу заставляет колесо втулки 14 подниматься вверх по шпинделю. Этот принцип используется для управления двигателем; Чем больше скорость двигателя, когда под паром, в колесе 14 развивается соответствующий подъем, и это колесо 14 расположено с помощью подходящей передачи для отключения пара от двигателя и, таким образом, управления им.
22
РАЗДЕЛ B. Универсальная траверса модели 8.
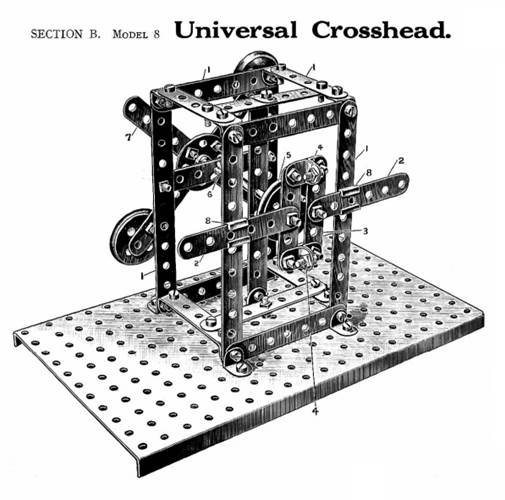
Эта модель показывает конструкцию, которая часто применяется в насосах и аналогичных механизмах. Он известен как универсальная траверса. Каркас 1 обычного типа состоит из плоских полос. На ближайшей стороне установлена подвижная рама, состоящая из двух прямых полос 2, соединенных с другой парой поперечных полос 3, прикрепленных на концах болтами с помощью угловых скоб 4 для образования паза. Этот паз входит в зацепление с выступающим стержнем болта, ввинченного во фланцевое колесо 5, которое фиксируется на коротком шпинделе 6, проходящем через среднюю вертикальную полосу и задний каркас. Четыре планки 7, прикрепленные болтами к втулочному колесу, закрепленному на внешнем конце шпинделя 6, действуют как маховое колесо. Передние планки 2 направляются в наглазниках 8. При возвратно-поступательном движении передней рамы одной или другой планкой 2 в направляющих 8 можно увидеть, что направляющие 3 с прорезями воздействуют на выступающий болт колеса 5 и вращаются. вал 6. Это еще один пример методов, принятых в технике для преобразования возвратно-поступательного движения во вращательное движение. Это движение очень выгодно, поскольку оно эквивалентно шатуну бесконечной длины.
23
РАЗДЕЛ Б. Муфта Гука модели 9.
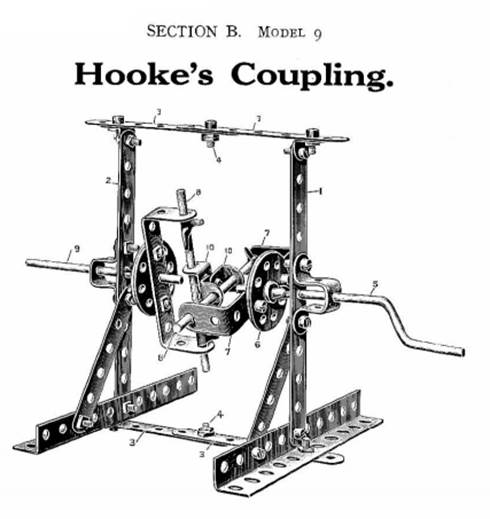
На нем показано устройство, известное как муфта Гука, которое предназначено для использования в ситуациях, когда требуется соединить вместе два вращающихся вала, которые не находятся на одной линии. Будет обнаружено, что эта модель передает полное понимание того, что в противном случае является очень сложным и неуловимым движением. Две боковые рамы 1 и 2 состоят из плоской вертикальной полосы и базовой угловой балки. Они снабжены вверху и внизу жесткими выступающими планками 3, которые соединены вместе в точке 4 таким образом, что рамы 1 и 2 могут быть расположены относительно друг друга. На коленчатом валу 5 закреплено колесо 6, к которому болтами прикреплена изогнутая полоса 7. На концах этой изогнутой полосы 7 установлен короткий шпиндель 8, и точно такое же дублирующее образование предусмотрено для вала 9 сбоку. рама 2. Поперечные валы 8 соединены парами угловых скоб 10, расположенных спина к спине. Было бы целесообразно сначала сконструировать эти угловые кронштейны, а затем пропустить через них валы 8, когда они помещены между изогнутыми губками полос 7. Теперь валы 5 и 9 соединены таким образом, что даже если боковые рамки 1 и 2 повернуты вокруг болтов 4 в положение, при котором валы 5 и 9 наклонены друг к другу, при этом муфта будет по-прежнему соединять один вал с другим с возможностью вращения. Такой тип муфты чрезвычайно полезен во многих ситуациях на заводе.
24
РАЗДЕЛ C. Модель 1 Шкивы первого порядка.
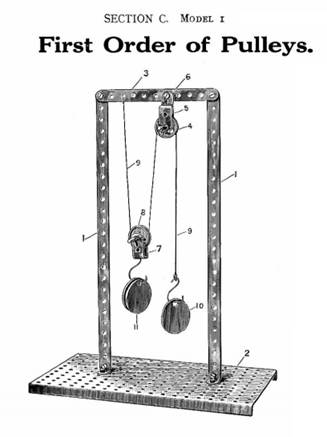
Данная модель представляет собой простую систему шкивов первого порядка. Рама 1 прикреплена болтами к перфорированной пластине 2 под самым черным углом и снабжена верхней поперечной полосой 3. На этой поперечной полосе 3 установлен неподвижный шкив 4, который шарнирно установлен на коротком шпинделе, проходящем через единственный изгиб. планка 5, образующая подшипник шпинделя. Эта изогнутая полоса 5 прикреплена к поперечной планке 3; аналогичная изогнутая полоса 7 несет подвижный шкив 8. Непрерывный приводной шнур 9 прикреплен к поперечной планке и продет под шкив 8 и поверх шкива 4, при этом грузы 10 и 11 подвешены к концу шнура и изогнутому полоса 7 соответственно. Следует отметить, что для таких моделей, как эта, и последующих моделей C 2, шкив, установленный таким образом, что он может вращаться только вокруг фиксированной оси, как шкив 4, не дает никаких механических преимуществ; это просто бесконечный рычаг, имеющий два равных плеча, и он используется для изменения направления силы. Однако, когда шкив подвижен, поднимаемый вес всегда будет больше, чем прилагаемое усилие, и тогда преимущество зависит от количества тросов, на которых подвешивается груз. В этом устройстве, когда шкив 4 зафиксирован, а шкив 8 подвижен, будет обнаружено, что сила, которая в данном случае представляет собой вес 10, необходимый для подъема шкива 8, составляет лишь половину нагрузки 11, при этом два шнура, поддерживающие нижний блок шкива, несущий нагрузку.
25
РАЗДЕЛ C. Шкивы второго порядка, модель 2.
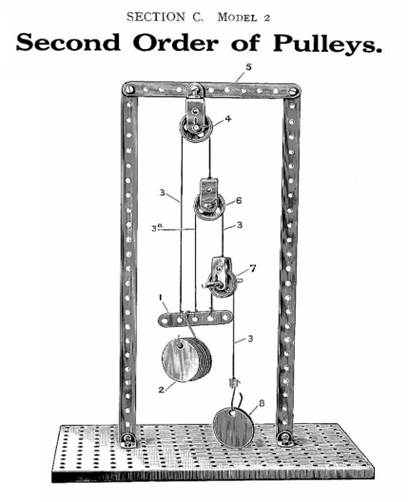
Данная модель представляет собой систему шкивов второго порядка. В модели C 1 из предыдущего примера система имеет только один непрерывный шнур; в настоящем устройстве имеется несколько отдельных шнуров, все прикрепленные к поперечине 1, поддерживающей нагрузку 2. Самый дальний из шнуров 3 проходит через шкив 4, прикрепленный к верхнему элементу 5 каркаса; другой конец этого шнура прикреплен к поддерживающей одиночной изогнутой полосе подвижного шкива 6, следующий шнур 3а проходит от полосы 1 вокруг подвижного шкива 6 к полосе второго подвижного шкива 7. В этом примере будет обнаружено, что груз 2, который может быть поднят с помощью силы 8, в восемь раз больше силы. Шнуры прикреплены к гайкам под изогнутыми полосками шкивов 6 и 7. Конечно, во всех этих устройствах существует определенное трение, которое необходимо преодолеть в подшипниках шкивов. Что касается этой второй системы шкивов, можно упомянуть, что такая конструкция с более чем одним шнуром, будучи более мощной, чем система с одним шнуром, и хотя интересна с механической точки зрения, за некоторыми исключениями редко используется в практика. Системы с одним сплошным шнуром более удобны в установке и управлении. В этой конструкции механическое преимущество будет зависеть от относительных значений силы 8 и веса 2, который нужно поднять.
26
РАЗДЕЛ C. Блок и захват модели 3.
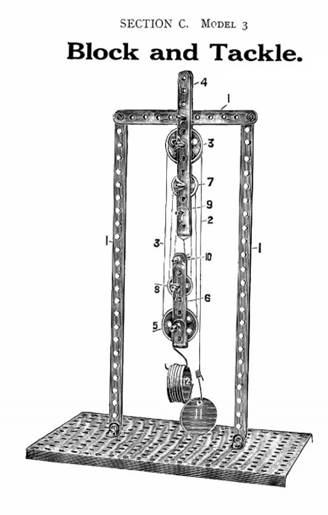
Это схема, показывающая более обычное применение системы шкивов в случае блокировки и захвата. В этом случае имеется только один непрерывный шнур 2, который проходит вокруг верхнего шкива 3, шарнирно закрепленного в полосах 4, прикрепленных к раме 1. Затем шнур проходит через нижний шкив 5, также установленный с возможностью поворота в подвижном элементе. рама 6, затем следующий верхний неподвижный шкив 7, а затем нижний подвижный шкив 8; оттуда к небольшому верхнему шкиву 9 и, наконец, вокруг соответствующего нижнего шкива 10, и закреплен на конце изогнутой полосы, прикрепленной к 4. Влияние силы 11 на подъем груза 12 определяется путем подсчета количества шнуры, которые подпрыгивают от нижнего подвижного блока 6 шкива к неподвижному блоку 4. В данном случае будет видно, что это 7. Таким образом, механическое преимущество такой системы без учета трения будет равно 7. На практике различные каждый из шкивов в фиксированном и подвижном наборе установлен на той же оси, что и в следующем примере C 3a, что обеспечивает более компактное расположение.
27
РАЗДЕЛ C. Блок и захват модели 3a.
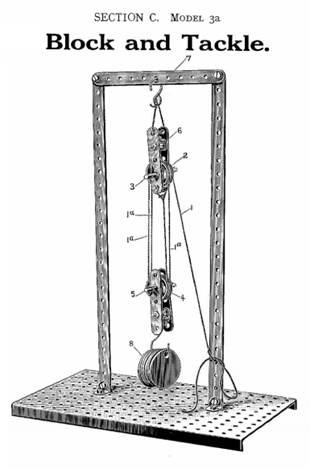
Этот пример показывает более обычное расположение шкивов на практике с блоком и захватом, показанное в двух предыдущих примерах. В этом случае шнур 1 является непрерывным, проходя через верхние шкивы 2, которые незакреплены на шпинделе 3, и через свободные шкивы 4 на нижнем шпинделе 5, окончательно закрепленные на верхнем блоке. Верхние шкивы 2, а также нижние шкивы 4 размещены в боковых полосах 6, соединенных угловыми скобами для образования кулачков, причем верхний из шкивов жестко поддерживается крюком на поперечине 7, нижний набор шкивов 4 является подвижным. . Здесь снова будет обнаружено, что величина нагрузки 8, которую может поднять рабочий шнур 1, зависит от количества шнуров 1a, которые выходят из нижнего блока. В показанном устройстве, например, сила, необходимая для подъема груза 8, будет составлять одну четверть этого веса без учета трения из-за того, что четыре шнура проходят от нижнего блока к верхнему. В каждом блоке может быть любое количество шкивов, устройство относится ко «второй системе шкивов». Это одна из самых удобных и общепринятых в использовании систем.
Принцип устройства можно легко понять, рассмотрев, что произойдет, если нижний набор шкивов, несущих вес, будет поднят, скажем, на один дюйм. Это приведет к ослаблению или укорочению каждого из четырех шнуров 1а на один дюйм, в результате чего тяговый шнур 1 должен будет пройти четыре раза на один дюйм, чтобы компенсировать это провисание; следовательно, действующая сила, тянущая к этому шнуру 1, проходит в четыре раза большее пространство, чем поднимается груз. Таким образом, без учета трения рабочая сила должна составлять четверть поднимаемого веса.
28
РАЗДЕЛ C. Колесо и ось модели 4.
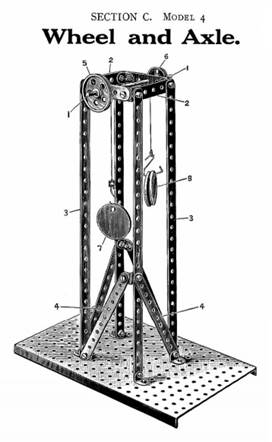
Принцип, воплощенный в этом устройстве, основан на принципе непрерывного рычага, при этом больший шкив 5, к которому прилагается сила 7, преодолевает более тяжелый вес 8, который наматывается своим поддерживающим шнуром вокруг меньшего шкива 6. Такое расположение используется. для многих целей, например, для судового рулевого механизма или подъема товаров в магазине или на заводе. Пренебрегая трением в устройстве, вес 7, умноженный на количество оборотов шкива 5, всегда должен равняться нагрузке 8, умноженной на шкив 6. Из описания рычага модели c 7 видно, что применяется тот же принцип. здесь, как и в этом случае, а именно, что сила, умноженная на плечо или радиус большого шкива 5, равна нагрузке, умноженной на его плечо, другими словами, моменты обеих сил 7 и 8 вокруг оси 1 равны.
29
РАЗДЕЛ C. Зубчатая передача модели 5.
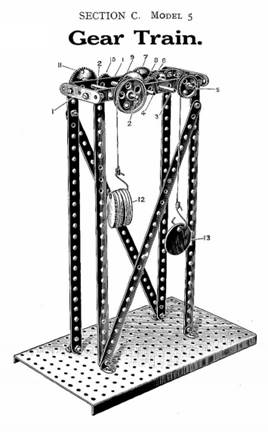
Эта модель показывает обычный тип колесной передачи, используемый в машиностроении, где требуется уменьшить скорость вала, соединенного с приводным валом. Рама 1 состоит из валов 2, 3, 4 и 5, установленных сбоку. полоски. Малая шестерня 6, закрепленная на валу 5, зацепляется с зубчатым колесом 7, а шестерня 8 на противоположной стороне вала 3 также зацепляется с зубчатым колесом 9, внешняя шестерня 10 на том же валу зацепляется с зубчатым колесом 11. При вращении вала 5 с определенной скоростью будет обнаружено, что вращение шпинделя 2 происходит намного медленнее; Точная относительная пропорция скорости этих двух валов получается путем умножения количества зубьев в больших прямозубых колесах 7, 9 и 11 и деления этого произведения на количество зубьев, умноженных вместе в шестернях 6, 8 и 10. A 38 мм. шкив закреплен на конце вала 2, а меньший шкив на валу 5, как показано на рисунке, при этом на этих шкивах с помощью шнуров опираются грузы 12 и 13. Из этого будет установлено, что сила 13, приложенная к колесам шкива, закрепленным на валу, всегда будет приблизительно в определенной пропорции от силы на валу 2 и будет соответствовать относительным скоростям вращения валов 2 и 5 – дюйм. Другими словами, сила, действующая на вал 5, умноженная на его скорость вращения, будет равна весу, поднимаемому валом 2, умноженному на его собственную скорость вращения. Это, конечно, не совсем так, поскольку во всех этих машинах необходимо сделать определенную поправку на трение машины. Предположим, однако, что у нас может быть машина абсолютно без трения, тогда этот результат действительно будет получен.
30
РАЗДЕЛ C. Червячно-червячное колесо модели 6.
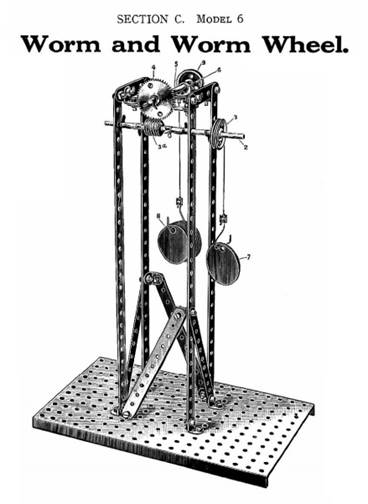
Здесь показано очень известное расположение червяка и червячного колеса. В последнем примере показано устройство, в котором вал, вращающийся с высокой скоростью, постепенно понижается до гораздо более низкой скорости, таким образом преобразуя быстро вращающийся вал малой мощности в медленно вращающийся вал большой мощности, но этот метод неэкономичен и также неудобно, и чтобы избежать этого, необходимо использовать устройство, показанное на данной иллюстрации. При создании этой модели предусмотрен обычный тип рамы, в которой поддерживается коленчатый вал 2, несущий червяк 3a. Это червячные передачи с колесом 4, закрепленным на поперечном валу 5, опирающимся на угловые кронштейны 6 от рамы. При вращении вала 2 с высокой скоростью можно заметить, что зубчатое колесо 4 вращается очень медленно; Фактически, один оборот вала 2 перемещает колесо 4 только на расстояние, равное одному зубцу. Это всегда происходит, когда червь 3a известен как однопоточный червь. Таким образом, в этом случае можно видеть, что относительные скорости вала 2 и зубчатого колеса 4 зависят от количества зубьев в последнем. В показанной модели это колесо имеет 50 зубцов; вал 2 должен будет повернуться 50 раз, чтобы дать валу 5 полный оборот. Такая конструкция, выполняющая тот же принцип, что и сложная колесная передача из предыдущего примера, имеет большое преимущество в инженерии. Он часто используется для уменьшения высокой скорости вала электродвигателя.
Чтобы проверить эффективность этого примера, червячный вал 2 снабжен шкивом 3, а вал шестерни 5 также снабжен шкивом 9. Предположим теперь, что в этой машине нет трения, необходимо усилие 7. чтобы поднять груз 8, переносимый шкивом 9, потребуется всего одна пятидесятая нагрузки 8, то есть, если предположить, что в шестерне 4 (которое в данном случае действует как червячное колесо) 50 зубьев, то червяк 3а представляет собой червяк с одной резьбой и что в машине нет трения. Для этого следует провести реальный эксперимент, прежде всего выясняя, какое усилие необходимо приложить к шкиву 3, чтобы просто повернуть вал 5, когда на шкив 9 нет нагрузки. Это внесет необходимую поправку для трение в аппарате, после чего приступают к определению относительных значений силы 7, необходимой для подъема любого заданного веса 8.
31
РАЗДЕЛ C. Рычаг модели 7.
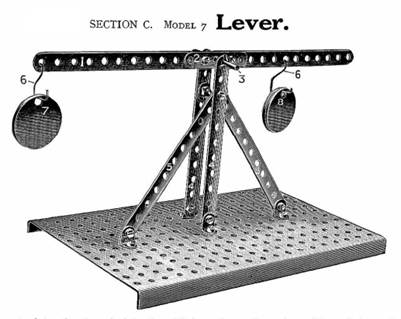
Этот пример служит для определения принципа равновесия обычного рычага. Главный рычаг 1 состоит из 25-элементной полосы, усиленной в центре короткой 2, между которой и длинной полосой находятся распорные гайки. С помощью этого усиления полоса 2 передаются короткий вал 3, который поддерживается в стойках 4 осуществляются с постелью пластины и приготовился к нему с помощью диагональных полос 5. Крюков 6 представляют собой для поддержания веса. Выбрав определенное количество дисковых грузов и подвесив их в различных отверстиях с каждой стороны шпинделя 3, будет обнаружено, что любой вес 7 на одной стороне шпинделя, умноженный на рычаг или расстояние, то есть число отверстий - от шпинделя 3, будет равен весу 8, умноженному на его плечо или расстояние, или количество отверстий от шпинделя 3. Вес на любой стороне, умноженный на его плечо или расстояние от шпинделя 3 шпинделя, называется момент силы или веса вокруг оси 3, и это необходимо для того, чтобы рычаг уравновесил, чтобы моменты на каждой стороне оси были равны. Перфорированная полоса представляет собой удобное средство расчета расстояния грузов от точки опоры 3.
32
РАЗДЕЛ C. Модель 8 Bell Crank.
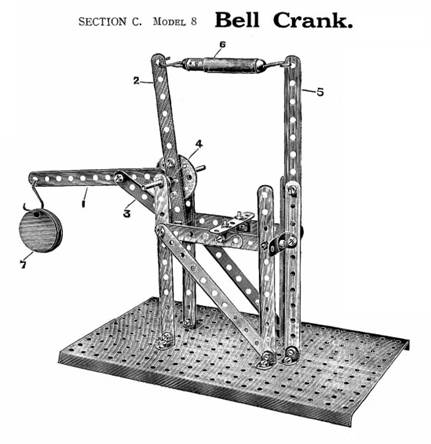
Простая форма рычага для экспериментальных целей представлена рычагом коленчатого рычага, как показано. Сам коленчатый рычаг состоит из более длинной полосы 1, прикрепленной к полосе 2 диагональной стяжкой 3. Эти полосы повернуты на 4; кронштейн 5 также прикреплен к пластине, а пружинный баланс 6 соединен с более коротким рычагом 2 коленчатого рычага и стойкой 5. Вес 7 переносится с более длинного рычага 1 кривошипа. При проведении эксперимента с этой моделью следует отметить, что вес 7, умноженный на количество перфорационных отверстий от точки подвешивания до оси 4, представляет собой момент груза 7 относительно точки опоры. Пружинный баланс будет регистрировать усилие, создаваемое этим весом, и это усилие, умноженное на количество отверстий от точки крепления баланса до точки опоры, дает балансирующий момент на коротком плече рычага. Эти два момента, конечно, должны соответствовать. Перемещая подвешенный груз 7 в различные места вдоль полосы 1, можно увидеть, что усилие на пружинных весах непрерывно изменяется пропорционально изменяющимся расстояниям, на которых подвешен груз. Необходимо провести эксперименты, чтобы доказать, что закон моментов подходит для любого положения груза 7.
33
РАЗДЕЛ C. Модель 9 Треугольник Сил.
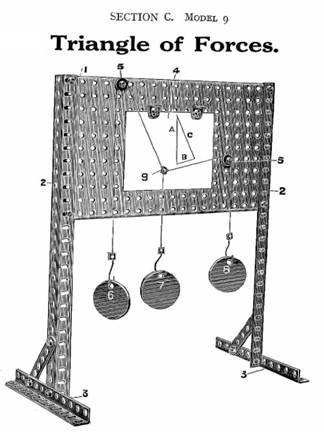
Эта модель иллюстрирует известный принцип треугольника сил. Кратко об этом можно сказать следующее. Если любые три силы встречаются в одной точке и находятся в равновесии, то, если направления всех трех сил известны и величина любой из них известна, величина двух других может быть определена путем рисования треугольника, например обозначены на сторонах A, B и C на меньшей диаграмме, стороны которых параллельны направлению всех трех сил.
Рисуя треугольник, начните с рисования линии, соответствующей направлению, величина которого известна. Предположим, что эта сила равна пяти единицам. Следует провести линию, параллельную направлению этой силы, и отложить ее до пяти единиц в некотором подходящем масштабе. От концов этой линии следует завершить ост
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|