- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
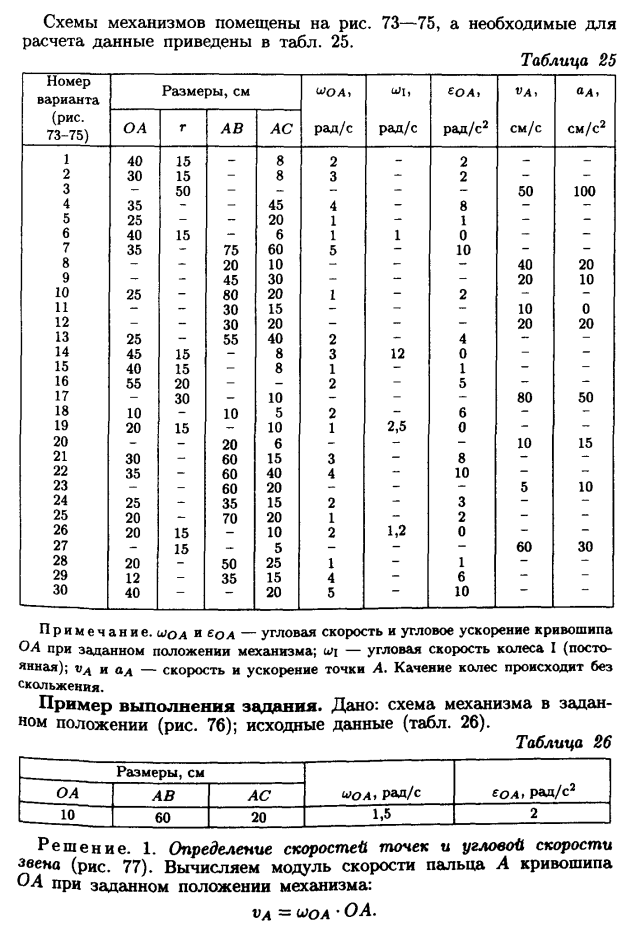
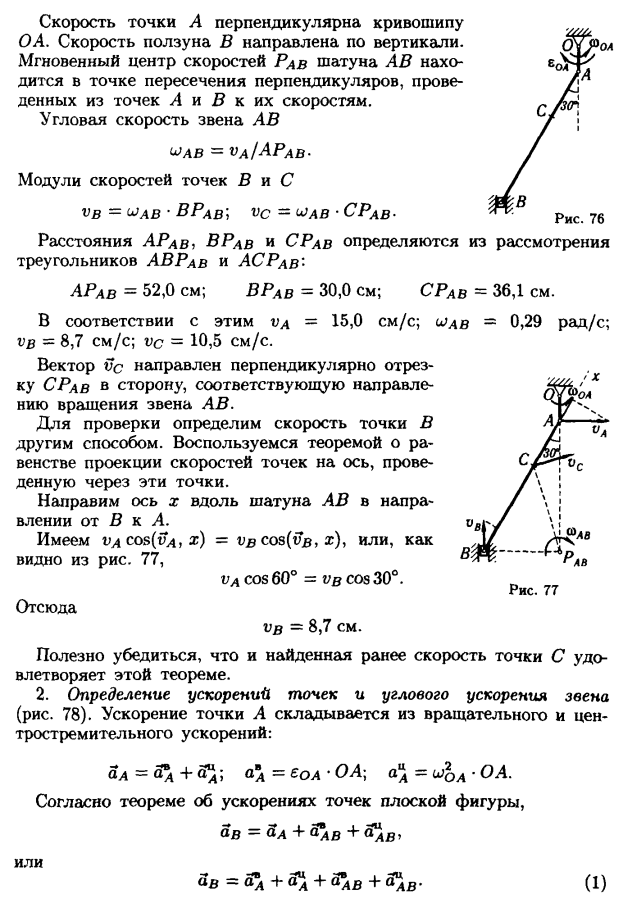
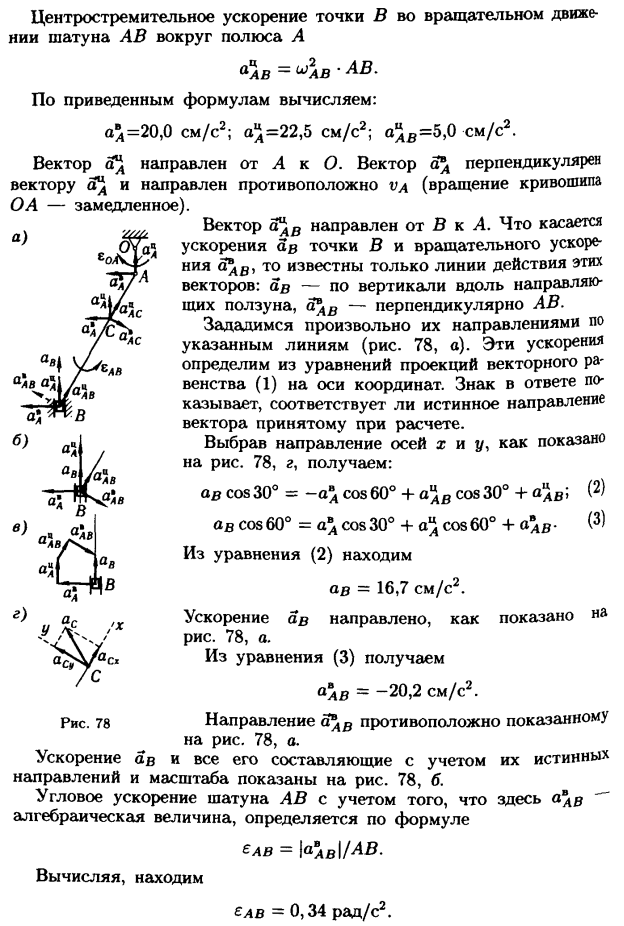
Практическое занятие №12. Плоское движение твердого тела
 |
Практическое занятие №12
Плоское движение твердого тела
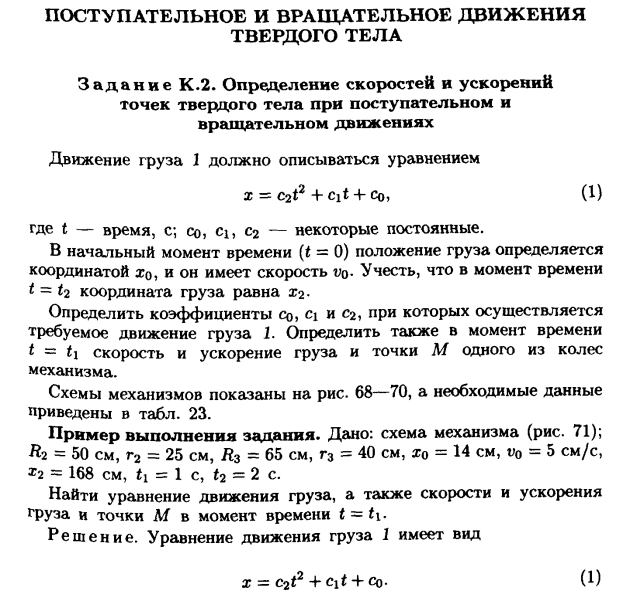
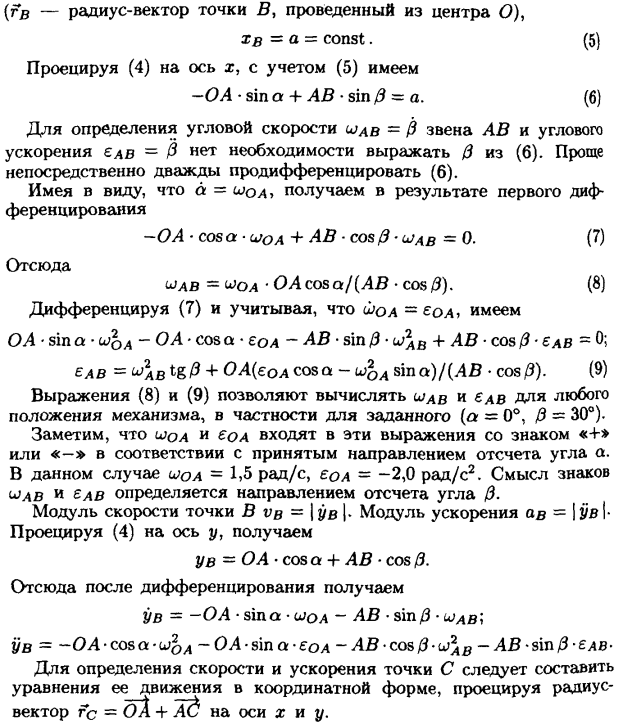
Дано. Кривошип  кривошипно-ползунного механизма, вращается с постоянной угловой скоростью
кривошипно-ползунного механизма, вращается с постоянной угловой скоростью 
 (рис. 13.10, а). Определить ускорение ползуна
(рис. 13.10, а). Определить ускорение ползуна  , если в данном положении кривошип образует с направляющей ползуна угол
, если в данном положении кривошип образует с направляющей ползуна угол  . Размеры:
. Размеры:  ,
,  .
.
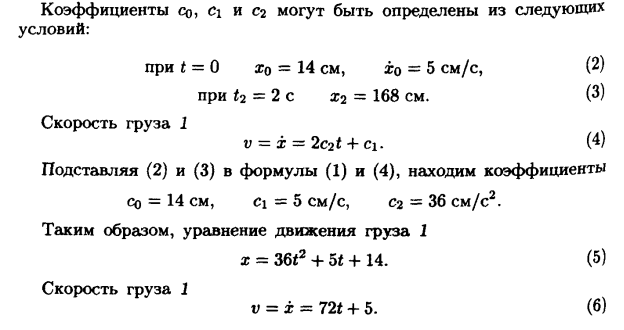
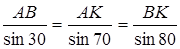
Решение. При определении ускорения воспользуемся либо методом полюса (59), либо МЦУ (60). Независимо от выбранного метода при решении задачи потребуются параметры вращательного движения (угловая скорость, угловое ускорение). Следовательно, задачу на определение ускорений придется решать, начиная с плана скоростей, чтобы определить угловые скорости звеньев. Сначала определяем все углы в треугольнике  . По теореме синусов:
. По теореме синусов:
 ,
,  ,
,  .
.
Тогда угол  (рис. 13.10, б). Рассматривая точку
(рис. 13.10, б). Рассматривая точку  как принадлежащую Звену , отмечаем, что для звена точка
как принадлежащую Звену , отмечаем, что для звена точка  является МЦС (точка – опора, тогда
является МЦС (точка – опора, тогда  ). Тогда с учетом (50)
). Тогда с учетом (50)
и направлен вектор  перпендикулярно звену . Ползун движется по прямолинейной направляющей, значит, его скорость
перпендикулярно звену . Ползун движется по прямолинейной направляющей, значит, его скорость  будет направлена горизонтально влево (с учетом направления вектора ). Тогда, проводя перпендикуляры к векторам и , строим МЦС для звена
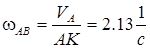
будет направлена горизонтально влево (с учетом направления вектора ). Тогда, проводя перпендикуляры к векторам и , строим МЦС для звена  (рис. 13.10, б). Угловая скорость
(рис. 13.10, б). Угловая скорость  звена будет вращать по ходу часовой стрелке, так как направление вращения угловых и линейных параметров должно совпадать. Из зависимости (50)
звена будет вращать по ходу часовой стрелке, так как направление вращения угловых и линейных параметров должно совпадать. Из зависимости (50)
 .
.
Размеры  и
и  определим из треугольника
определим из треугольника  по теореме синусов:
по теореме синусов:
 ,
,  ,
,  .
.
Тогда
 ,
, 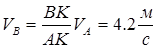 .
.
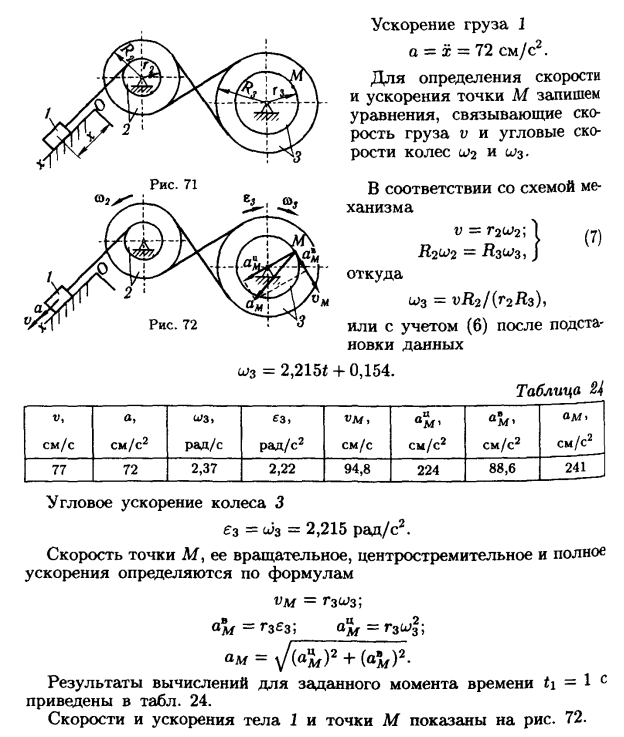
При определении ускорений методами (59) или (60) должно быть известно полное ускорение точки звена . Определим ускорение точки , которая принадлежит как звену , так и звену . Рассматривая точку как принадлежащую звену , отмечаем, что для звена точка является МЦУ (точка – опора, тогда  ). Тогда с учетом (60)
). Тогда с учетом (60)
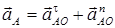 ,
,
где  , так как
, так как  ,
,  ,
,  ,
,  и направлен этот вектор из точки в точку (рис. 13.10, в).
и направлен этот вектор из точки в точку (рис. 13.10, в).
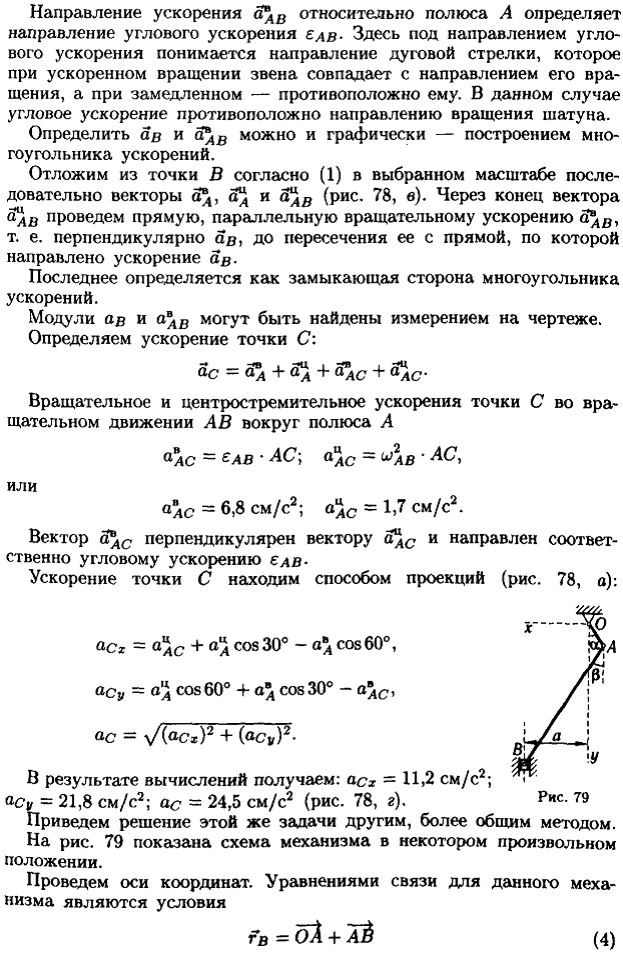
Поскольку угловое ускорение звена неизвестно, то для определения  воспользуемся зависимостью (59). Принимаем точку за полюс и в соответствии с (59) получаем
воспользуемся зависимостью (59). Принимаем точку за полюс и в соответствии с (59) получаем
 ,
,
где  ,
,  .
.
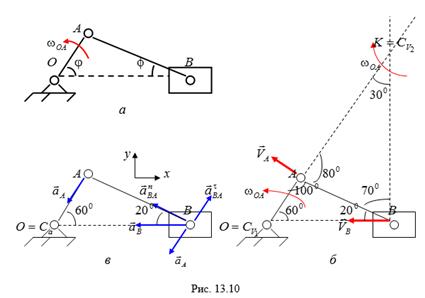
Расставляем эти вектора на схеме (рис. 13.10, в). Ускорение полюса учитывает поступательную часть движения, т.е.  переносим в точку параллельно самому себе. При вращении точки относительно точки нормальная составляющая
переносим в точку параллельно самому себе. При вращении точки относительно точки нормальная составляющая  будет направлена к центру, вдоль звена из точки к точке , а касательная составляющая
будет направлена к центру, вдоль звена из точки к точке , а касательная составляющая  перпендикулярно , т.е. перпендикулярно . Направляем предположительно, так как направление вращения
перпендикулярно , т.е. перпендикулярно . Направляем предположительно, так как направление вращения  неизвестно. Ускорение может быть направлено либо влево, либо вправо (ползун перемещается только по горизонтали). Направляем влево. Если при расчете или получаем со знаком минус, значит, направление этого вектора было выбрано неверно. Затем вводим плоскую систему координат и проектируем векторное равенство (59) на оси:
неизвестно. Ускорение может быть направлено либо влево, либо вправо (ползун перемещается только по горизонтали). Направляем влево. Если при расчете или получаем со знаком минус, значит, направление этого вектора было выбрано неверно. Затем вводим плоскую систему координат и проектируем векторное равенство (59) на оси:
 ,
, 
 ,
, 
Знаки у векторов и получены положительные, следовательно, на рис. 13.10, в показано их истинное направление.
Ответ:  , .
, .
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|