- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Рисунок 2.39 Датчик перемещения подъёмной машины – НЕТ
Рисунок 2.39 Датчик перемещения подъёмной машины – НЕТ
Рисунок 2.40 Датчик перемещения фирмы Цейс – НЕТ
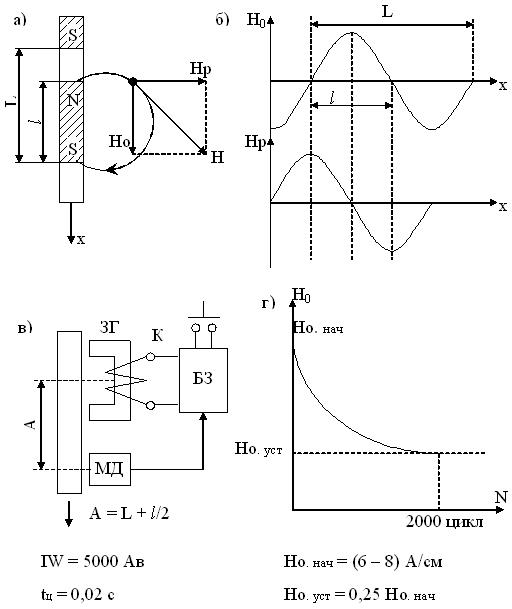
Рисунок 2.41 К принципу действия датчика перемещения канатного транспортирующего средства
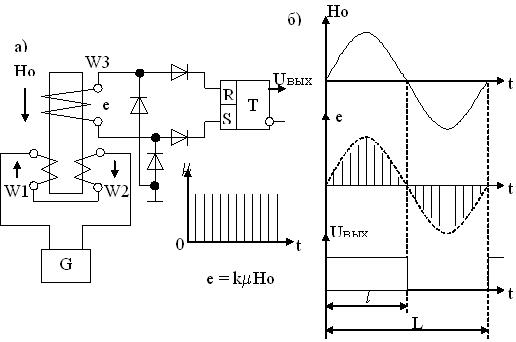
Рисунок 2.42 Схема магнитомодуляционного зонда
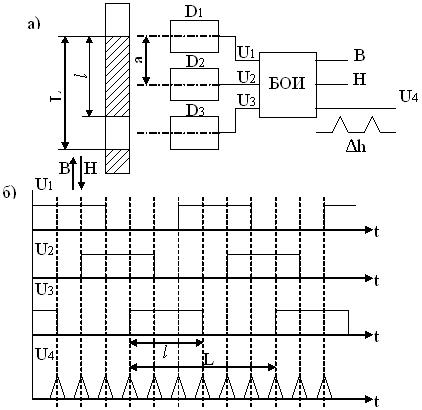
Рисунок 2.43 Схема реального трёхфазного преобразователя импульсов
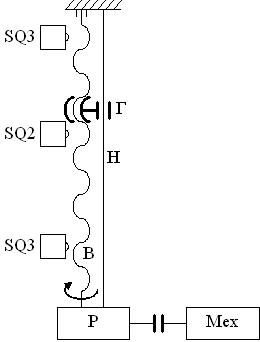
Рисунок 2.44 Программирующее устройство с винтовым приводом
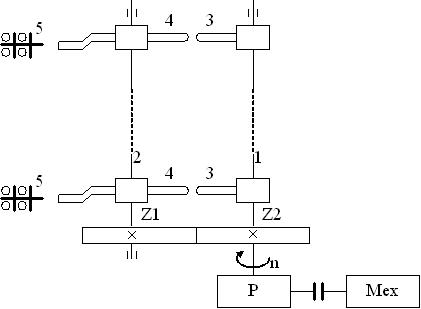
Рисунок 2.45 Программирующее устройство для механизмов с большими путями передвижения
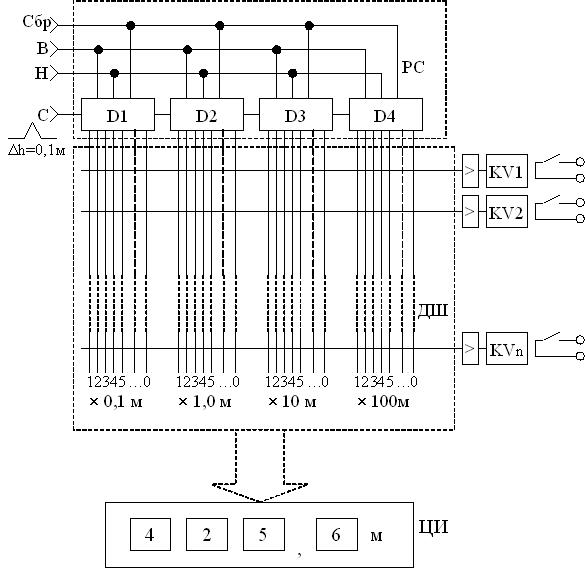
Рисунок 2.46 Схема цифрового программирующего устройства
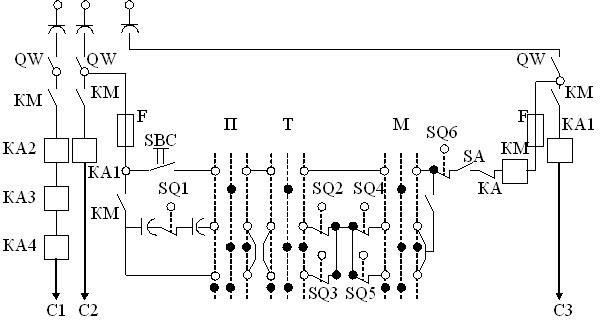
Рисунок 3.1 Схема защитной панели крана
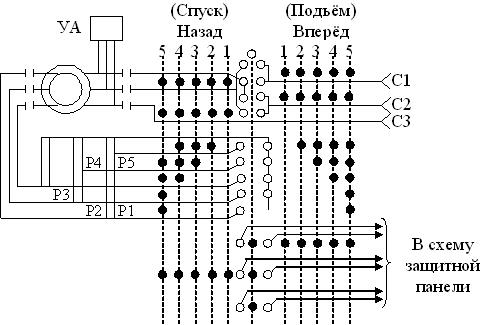
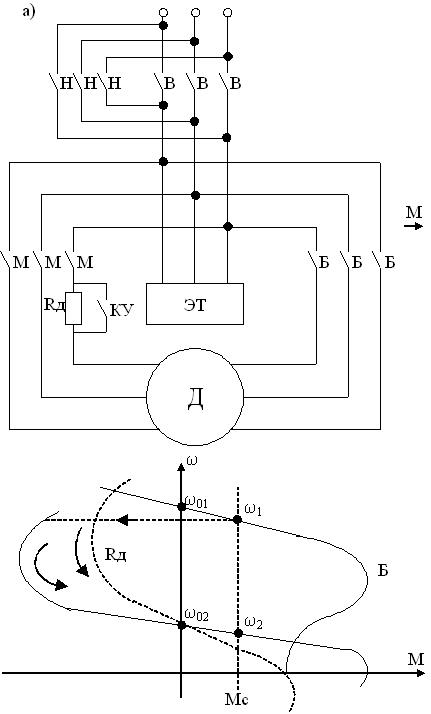
Рисунок 3.2 Схема управления приводом передвижения крана с использованием силового контроллера
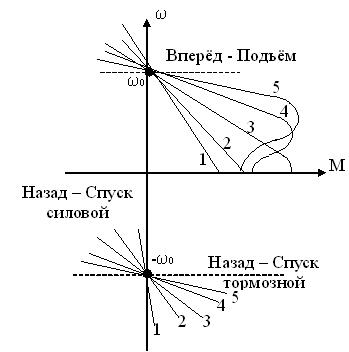
Рисунок 3.3 Механические характеристики привода крана для различных положений контроллера
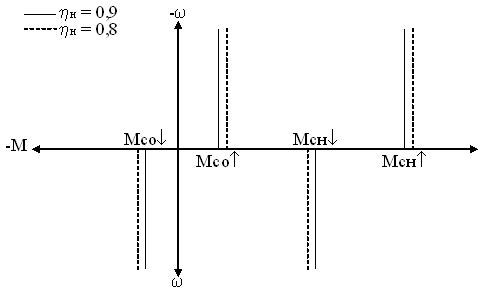
Рисунок 3.5 Пределы изменения статических моментов при подъёме и спуске грузов
Мсн¯ - номинальный статический момент ¯ (определяется Qн);
Qо – вес грузозахватывающего приспособления;
Qн – вес номинального груза;
Мсо - минимальное значение статического момента при подъёме;
Мсо¯ - минимальное значение статического момента при спуске груза.
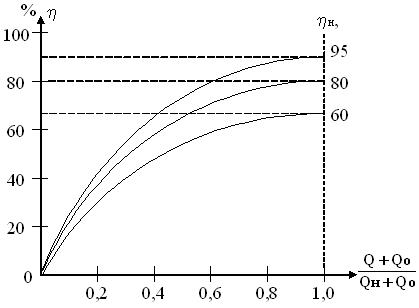
Рисунок 3.6 Зависимость КПД механизма от степени загрузки его при разных hн
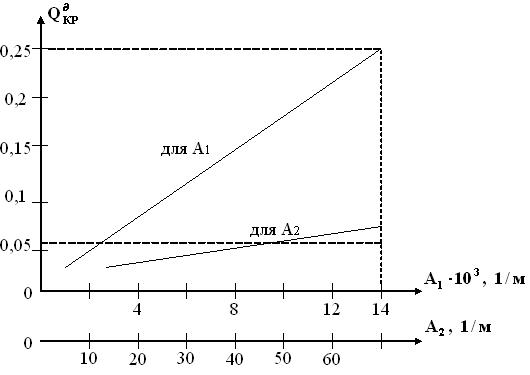
Рисунок 3.7 Зависимость величины критического груза от аргумента А
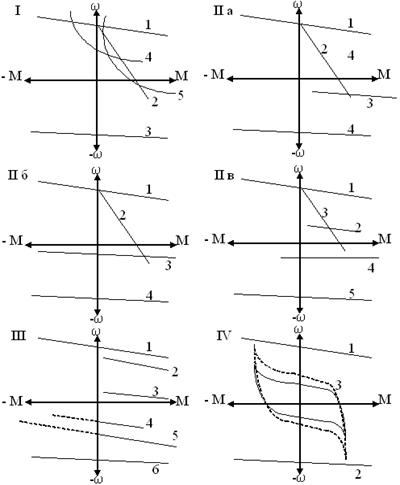
Рисунок 3.8 Механические характеристики механизмов подъёма различных кранов
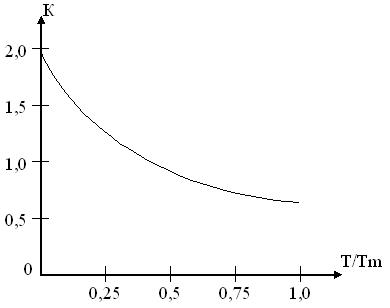
Рисунок 3.9 Зависимость коэффициента К от Т и Tm
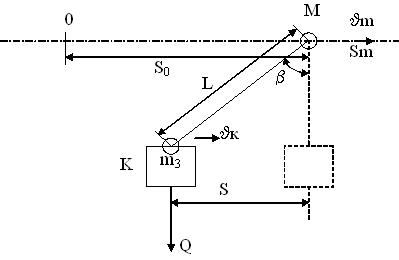
Рисунок 3.10 Расчётная схема процесса раскачивания груза
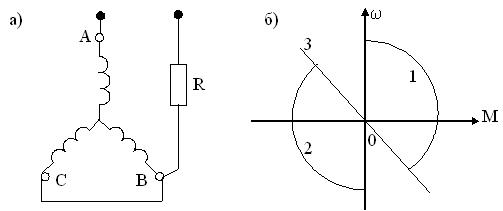
Рисунок 3.11 Однофазное включение асинхронного привода в
режиме тормозного спуска
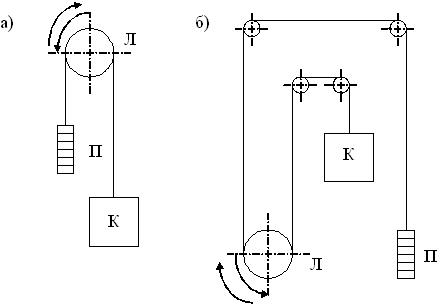
Рисунок 4.1 Кинематические схемы лифтов с верхним а) и нижним б) расположением электропривода
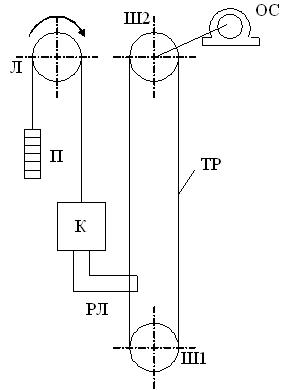
Рисунок 4.2 Конструкция клещевого ловителя
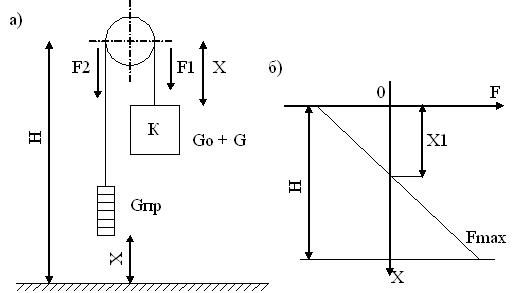
Рисунок 4.3 Схема приложений усилий к канатам лифта
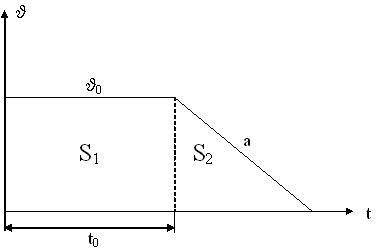
Рисунок 4.4 Диаграмма движения кабины при торможении
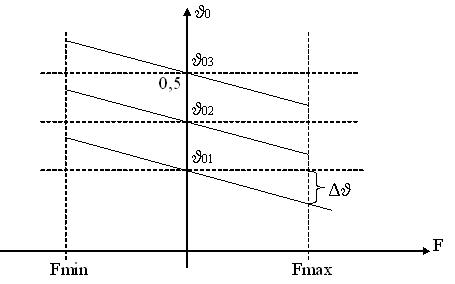
Рисунок 4.5 К расчёту точности остановки подъёмной машины
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|