- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Тема 2. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ.
Тема 2. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ.
Механическими передачами называют механизмы, которые служат для передачи механической энергии на расстояние, как правило, с преобразованием скоростей и моментов, иногда с преобразованием видов (вращательное в поступательное и т.п.) и законов движения.
Механические передачи применяют в машинах в случаях, когда: требуемые скорости движения рабочих органов машины не совпадают с оптимальными скоростями двигателя; необходимость работы с большими моментами на выходе; при необходимости применять поступательное движение с заданным законом изменения скорости при первичном источнике энергии в виде двигателя, создающего равномерное вращательное движение; при конструктивной невозможности соединения двигателя с исполнительными механизмами.
По принципу работы разделяют:
- передачи зацеплением с непосредственным контактом (зубчатые, червячные, винт – гайка) и с гибкой связью (цепные);
- передачи трением с непосредственным контактом тел качения (фрикционные) и с гибкой связью (ременные).
В зависимости от назначения передачи выполняют с постоянным или переменным (регулируемым) передаточным отношением. Основными характеристиками механических передач являются: передаточное отношение, передаваемый момент и коэффициент полезного действия.
Фрикционные передачи.
Передачи движения во фрикционных передачах осуществляется за счет сил трения между прижатыми друг к другу звеньями.
Достоинства фрикционных передач: простота конструкции; бесшумность; возможность бесступенчатого регулирования передаточного отношения и т. п.
Недостатки фрикционных передач: наличие усилия, сжимающего катки; проскальзывание элементов друг относительно друга, что приводит к сбою передаточного отношения; склонность к изменению геометрических форм рабочих элементов из-за их повышенного износа и т.п.
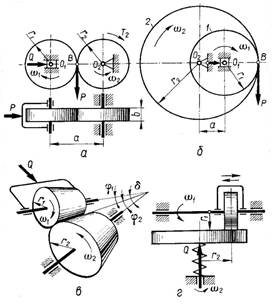 Фрикционные передачи различают с постоянным и регулируемым передаточным отношением. Фрикционные передачи (рисунок 2.1) конструктивно выполняют цилиндрическими катками (с внешним а) или внутренним б) касанием); коническими катками в) и комбинированные г), в частности, где телами трения являются диск и каток.
Фрикционные передачи различают с постоянным и регулируемым передаточным отношением. Фрикционные передачи (рисунок 2.1) конструктивно выполняют цилиндрическими катками (с внешним а) или внутренним б) касанием); коническими катками в) и комбинированные г), в частности, где телами трения являются диск и каток.
Фрикционные передачи, преобразующие вращательное движение ведущего звена в поступа-тельное ведомого, могут быть выполнены по раз-личным схемам: с одним катком (рисунок 2.2,а), когда вес ведомого звена обеспечивает необходи-мое усилие прижима; с двумя катками (рисунок
2.2,б), когда ведомое звено 3 прижимается
Рисунок 2.1 - Виды фрикционных передач свободно вращающимся катком 2 к ведущему
катку 1 и др.

Рисунок 2.2 - Схемы фрикционных передач для преобразования вращательного
движения в поступательное
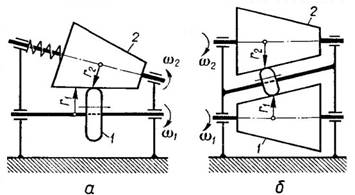
Рисунок 2.3 – Схемы вариаторов
Передачи с изменяемым передаточным отношением называют вариаторами, которые выполняют с непосредственным касанием рабочих тел трения (рисунок 2.3, а), когда регулирование осуществляется перемещением одного из катков и с промежуточным звеном, когда регулировка происходит перемещением промежуточного звена (рисунок 2.3,б). Диапазон регулирования imax/imin= 2,5…5.
Нестабильность передаточного отношения фрикционных передач учитывается коэффициентом проскальзывания x , который отражает упругое и геометрическое скольжение и определяется экспериментально
 (2.1)
(2.1)
Коэффициент x изменяется от 0,002 до 0,05 в зависимости от вида передачи.
Для предотвращения проскальзывания в процессе работы создают некоторый запас сцепления катков, который характеризуется коэффициентом запаса сцепления k.
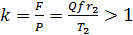 , (2.2)
, (2.2)
где f - коэффициент трения; F – сила трения ; Q – сила прижатия катков друг к другу;  - момент сопротивления, приложенный к катку 2.
- момент сопротивления, приложенный к катку 2.
Вращение катка 2 возможно в случае, когда сила трения F будет равна окружной силе P на радиусе  (P=Т2/ ).
(P=Т2/ ).
Необходимое усилие  прижатия катков
прижатия катков
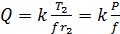 . (2.3)
. (2.3)
Проскальзывание происходит по причине несовпадения величин окружных скоростей точек контакта ведущего и ведомого звеньев , т.к. фактический контакт катков под действием усилия нажатия происходит не по линии или точке, а по площадке.
Материалы фрикционных катков должны иметь большие коэффициент трения и модуль упругости, а также быть износостойкими.
Наименьшее геометрическое скольжение имеет место во фрикционных парах: закаленная сталь – закаленная сталь; закаленная сталь – чугун, которые могут работать всухую и со смазкой.
Рабочие поверхности металлических катков выходят из строя вследствие выкрашивания (при работе со смазкой) и износа (при работе всухую). Это обстоятельство определяет, что расчет на прочность элементов передачи следует проводить по контактным напряжениям, основываясь на теории Герца, описывающей напряженно – деформированное состояние при контактном нагружении и устанавливают по ней геометрические параметры передачи.
В случае, когда за основной параметр передачи принято межосевое расстояние между элементами, его величина устанавливается по формуле Герца для двух сжатых цилиндров подстановкой соответствующих компонентов.
 , (2.4)
, (2.4)
где y =b/a – коэффициент ширины катков (обычно y= 0,2…0,4 при ширине катков b); f - коэффициент трения материалов катков;  – допускаемое контактное напряжение, МПа: для пары сталь – сталь при работе всухую =(1,2…1,5)HB , при работе в масле
– допускаемое контактное напряжение, МПа: для пары сталь – сталь при работе всухую =(1,2…1,5)HB , при работе в масле
= (2,5… 3,0) HB; u – передаточное число;Е – приведенный модуль упругости, МПа; k – коэффициент запаса сцепления; Т2 – крутящий момент на ведомом валу, Н∙м (Т2 =P2 /w 2, где P2, кВт, мощность на ведомом валу; w 2, рад/с, w 2= pn2 /30; n2 , об/мин,– частота вращения ведомого вала .
После установления межосевого расстояния рассчитываем диаметры катков, мм:
- ведущего d1= 2a.(u+1);
- ведомого (при коэффициенте скольжения x) d1∙u(1 -x);
Ширина катков b=a∙x , мм.
Усилия нажатия катков Q= 
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|