- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Вращающиеся магнитное поле
6 Машины переменного тока (М~Т)
6.1 Общие сведения об ЭМ~Т
В современной промышленности преимущественно применяются многофазные М~Т. Чаще всего число фаз m=3. Действие всех многофазных машин основано на эффекте вращающегося магнитного поля.
ЭМ~Т подразделяются на 3 вида:
а) синхронные (СМ);
б) асинхронные (АМ);
в) коллекторные (КМ).
В машинах типа а) ротор вращается с той же скоростью и в том же направлении, что и вращающееся магнитное поле (синхронно). Такие машин используются чаще всего в качестве генераторов переменного тока (Г~Т), в частности, на электростанциях, производящих электроэнергию для промышленности.
В машинах типа б) (АМ) скорость вращения ротора не равна скорости вращения магнитного поля. АМ используются в основном в качестве двигателей переменного тока (Д~Т).
Машины типа в) также являются асинхронными, но их выделяют из-за особенностей, связанных с наличием коллектора. Используются такие Д~Т обычно в качестве универсальных, т.е. способных работать как на постоянном токе, так и на переменном.
6.2 Вращающиеся магнитное поле
6.2.1 Поле трехфазного тока
Трехфазная система токо0в (рисунок), (т.е. электрический фазовый сдвиг между токами каждой из фаз А, В и С составляет 1200), протекающих в катушках, расположенных по окружности так, что их оси также находятся под углом (геометрическим) 1200, создает в результате взаимодействия создаваемых ими пульсирующих магнитных потоков магнитное поле, вращающееся в пространстве относительно оси этой окружности с частотой n1, равной частоте питающего катушки тока f1. Амплитуда результирующего поля В=1,5Вм, где Вм – амплитуда поля, созданного одной катушкой.
Направление вращения поля – в сторону оси катушки, в которой ожидается максимум тока. В те моменты времени, когда поле одной из катушек максимально, результирующее поле совпадает с ним по направлению.
Для изменения направления вращения поле достаточно изменить порядок следования фаз (А, В, С) токов в катушках.

6.2.2 Поле двухфазного тока
Двухфазная система состоит из двух сдвинутых на 900 (электрических) токов в фазах А и В
Если эти токи протекают по катушкам, содержащим w1 и w2 витков и сдвинутым в пространстве на 900 (геометрических), результат векторного сложения их пульсирующих магнитных полей представляет собой вращающееся поле, частота вращения которого (в пространстве) равна n1, направление вращения поля, как и в предыдущем случае, определяется чередованием максимумов токов в фазах.
Для того, чтобы модуль вектора В вращающегося магнитного поля оставался неизменным, т.е. поле было круговым, необходимо выполнение трех условий:
- сдвиг катушек в пространстве (геометрический, пространственный)  ;
;
- сдвиг токов в катушках (электрический, фазовый, временной)  ;
;
- МДС обеих катушек одинаковы  .
.
Нарушение любого из этих условий приводит к тому, что поле из кругового превращается в эллиптическое, т.е. конец вектора магнитной индукции описывает не окружность, а эллипс. Когда одно из условий полностью не выполняется, т.е. или  , или
, или  , или
, или  , то поле становится пульсирующим (вырожденный эллипс с равной нулю одной из полуосей).
, то поле становится пульсирующим (вырожденный эллипс с равной нулю одной из полуосей).
6.3 Устройство и принцип действия асинхронных машин переменного тока
6.3.1 Устройство асинхронного двигателя (АД)
 Неподвижная часть – статор, вращающаяся – ротор. Сердечники статора и ротора набираются из листовой стали (см. раздел 1, вихревые токи).
Неподвижная часть – статор, вращающаяся – ротор. Сердечники статора и ротора набираются из листовой стали (см. раздел 1, вихревые токи).
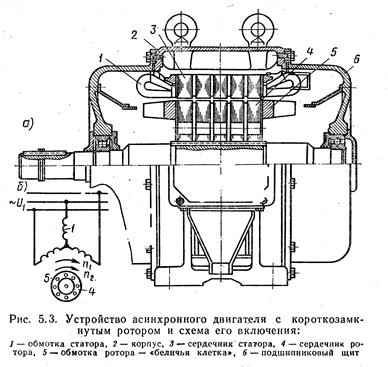
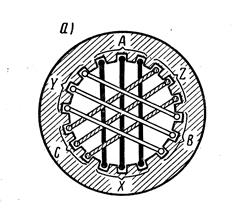
 На внутренней цилиндрической поверхности статора и на внешней цилиндрической поверхности ротора имеются пазы, в которых размещаются проводники обмоток соответственно статора (рисунок и ротора. Обмотка статора присоединяется к внешней электрической сети (двух- или трехфазной) непосредственно, а обмотка ротора - с помощью контактных колец (аналог коллектора ЭМ=Т) - соответственно двух или трех, в зависимости от числа фаз этой обмотки - и скользящих по ним щеток выводится наружу. Это - машина с фазным ротором (рисунок ).
На внутренней цилиндрической поверхности статора и на внешней цилиндрической поверхности ротора имеются пазы, в которых размещаются проводники обмоток соответственно статора (рисунок и ротора. Обмотка статора присоединяется к внешней электрической сети (двух- или трехфазной) непосредственно, а обмотка ротора - с помощью контактных колец (аналог коллектора ЭМ=Т) - соответственно двух или трех, в зависимости от числа фаз этой обмотки - и скользящих по ним щеток выводится наружу. Это - машина с фазным ротором (рисунок ).
Обмотка ротора АД другого типа (рисунок ) не имеет связи с внешними электрическими цепями, т.е. не нуждается в контактных кольцах, и выполняется в виде т. наз. "беличьей клетки", конструкцию которой очень напоминает (рисунок ). В каждом пазу ротора находится медный (чаще – алюминиевый) стержень; торцы всех стержней электрически соединены между собой с обеих торцевых сторон ротора кольцами из такого же материала, что и стержни, замыкающими эти стержни накоротко. Такая АМ называется машиной с короткозамкнутым ротором.
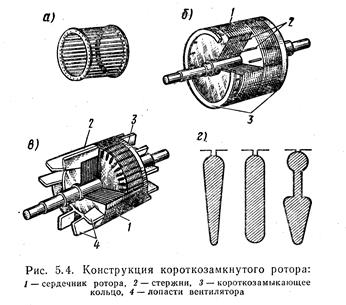 В АД малой и средней мощности стержни и торцевые кольца вместе с лопастями вентилятора воздушного охлаждения выполняются путем заливки углублений на поверхности ротора расплавленным алюминием. Это - наиболее часто используемый тип АД.
В АД малой и средней мощности стержни и торцевые кольца вместе с лопастями вентилятора воздушного охлаждения выполняются путем заливки углублений на поверхности ротора расплавленным алюминием. Это - наиболее часто используемый тип АД.
Часто АМ выполняют со скосом пазов ротора или статора для снижения высокочастотных зубцовых пульсаций, как и в М=Т.
6.3.2 Принцип действия АМ
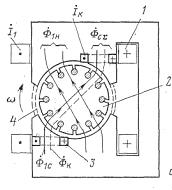
Магнитный поток Ф1, создаваемый током i1 c частотой f1 обмотки статора, при своем вращении со скоростью n1 (в пространстве внутри машины) пересекает проводники обмотки ротора и индуцирует в них ЭДС. Если обмотка ротора замкнута, в ней возникают токи i2, частота которых при неподвижном роторе совпадает с частотой f1 (в машинах переменного тока принято всем электрическим, магнитным и механическим величинам, относящимся к статору, присваивать индекс "1", а относящимся к ротору – "2" (за исключением механической скорости вращения ротора, обозначаемой всегда буквой "n" без индекса); соответствующим индексом обозначаются скорости вращения магнитных полей – иногда ( n2=n) они совпадает с механической скоростью вращения ротора n, иногда – нет).
В трехфазной обмотке ротора ток i2 – так же, как и в статоре, трехфазный, с той же частотой. Этот ток создает вращающийся поток ротора Ф2, направление и скорость вращения n2 которого при неподвижном роторе такие же, как и у потока статора:

Поэтому потоки статора и ротора вращаются синхронно и образуют общий вращающийся магнитный поток СМ Ф.
В результате взаимодействие токов ротора и созданного ими магнитного потока Ф2 с потоком статора Ф1 возникают механические силы и вращающий момент М. Несколько облегчает понимание этого явления представление возникающего механического момента как аналогии взаимодействия двух постоянных магнитов: два полюса одного из них (магнитное поле статора) вращаются относительно магнитных полюсов другого (магнитное поле ротора), пытаясь увлечь "магнит" ротора за собой.
 ЭДС электромагнитной индукции и токи, протекающие вследствие наличия этих ЭДС в обмотках машин переменного тока, могут быть из-за реактивного характера сопротивлений обмоток и подключенных к ним элементов сдвинуты по фазе на угол φ.
ЭДС электромагнитной индукции и токи, протекающие вследствие наличия этих ЭДС в обмотках машин переменного тока, могут быть из-за реактивного характера сопротивлений обмоток и подключенных к ним элементов сдвинуты по фазе на угол φ.
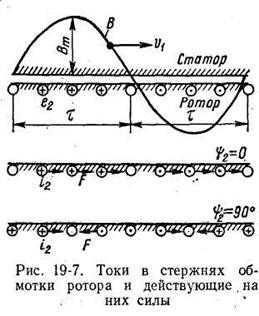
На рисунке показаны две ситуации: в первой ЭДС ротора е2 и ток ротора i2 совпадают по фазе (φ2 = 0). При φ2 = 0 все силы Fi, действующие на проводники обмотки ротора, направлены в сторону вращения поля, а суммарный электромагнитный момент, действующий на проводники и, соответственно, на удерживающий их ротор радиусом ra,
 .
.
При φ2=90º силы Fi действуют в противоположные стороны, и суммарный их момент М=0. Таким образом, вращающий момент создается только активной составляющей тока ротора.
Цепь ротора АД всегда имеет определенное активное сопротивление, поэтому при пуске (механическая скорость вращения ротора n = 0) возникает пусковой момент Mп > 0, и если Мп > Мв (статический тормозящий момент на валу, создаваемый полезной нагрузкой АД), ротор придет во вращение в направлении вращающегося поля с некоторой скоростью n < n1, т.е. будет вращаться с некоторым отставанием (скольжением) относительно поля статора.
Относительная разность скорости вращения поля и ротора называется скольжением:
 ,
,
или  .
.
При пуске АД S=1, n=0. При синхронном вращении (скорость вращения поля статора и механическая скорость вращения ротора одинаковы, т.е. n1 = n) скольжение S = 0.
Но при n=n1 магнитное поле статора относительно ротора становиться неподвижным, и токи в роторе индуцироваться не будут, следовательно, вынуждающий ротор вращаться момент становится равным нулю – начинается торможение). Поэтому такой скорости (синхронной) АД достичь не может, и в режиме двигателя всегда выполняются соотношения: 0 < n < n1, а 1 > S > 0.
При вращении ротора в сторону поля частота пересечения полем Ф проводников ротора пропорциональна разности скоростей поля n1 и ротора n (от f1 при n = 0 до 0 при n = n1). Поэтому частота тока i2 в роторе (при числе пар полюсов p = 1)
 .
.
Подставляя в это соотношение (см. выше), получим
 .
.
При  скорость вращения поля ротора относительно самого ротора
скорость вращения поля ротора относительно самого ротора
 ,
,
а скорость вращения поля ротора относительно статора
 .
.
Таким образом, скорость вращения поля ротора относительно статора всегда равна скорости вращения поля статора – магнитные поля статора и ротора АД имеют одну и ту же скорость (см. приведенную выше аналогию с магнитом, увлекаемым в движение вращающимся магнитным полем).
Если ротор АМ привести во вращение с помощью внешней силы по направлению вращения поля, причем создать скорость ротора больше, чем скорость вращения поля статора, направления электромагнитных сил и момента М изменятся на противоположные. Момент М, действующий на ротор асинхронной машины, при этом будет тормозящим, а машина переходит в режим генератора и отдает мощность в сеть: при  скольжение
скольжение  .
.
Если ротор асинхронной машины вращать в направлении, противоположном направлению вращения поля статора (n < 0), то электромагнитный момент М будет действовать на ротор в сторону вращения поля статора, но будет тормозящим. Это – режим электромагнитного тормоза (n < 0, S > 1).
6.4 Устройство и принцип действия СМ
6.4.1 Устройство СМ
Статор СМ устроен так же, как и АМ. Обмотка статора называется еще обмоткой якоря. Ротор СМ имеет обмотку возбуждения, питаемую через 2 контактных кольца и щетки постоянным током от постороннего источника. Часто этим источником является маломощный Г=Т, устанавливаемый на валу этой же СМ. Назначение ОВ - создание в машине первичного магнитного поля.
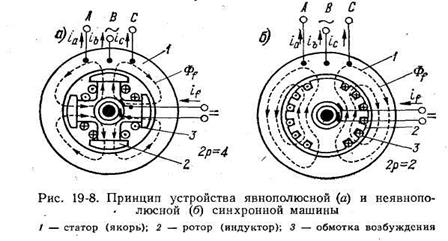 |
Роторы СМ бывают явнополюсные (т.е. их магнитные полюсы конструктивно выражены явно) и неявнополюсные (рисунок ). Сердечники полюсов набираются из листовой электротехнической стали. В полюсах СД (синхронных двигателей) делают пазы, в которые укладываются стержни пусковой обмотки, выполненной из материала с высоким удельным сопротивлением (латунь, ...). Торцы этих стержней объединяются короткозамыкающие кольца (аналог "беличьей клетки" АМ). Иногда полюсы делают не шихтованными, а цельными, и тогда роль пусковой обмотки выполняют сами массивные полюсы, имеющие в этом случае электрическую проводимость в осевом и радиальном направлениях.
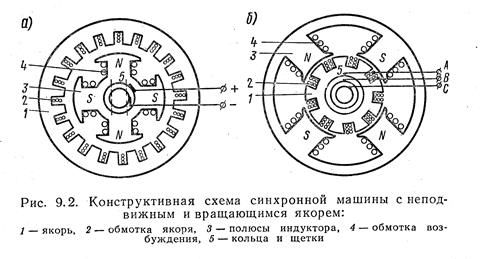
Маломощные СМ иногда имеют обращенную конструкцию (индукторы (полюсы) располагают на статоре, а обмотки якоря размещают на вращающемся роторе (рис. ). В таком случае электрическая связь с этой обмоткой осуществляется через 3 контактных кольца (аналог коллектора ЭМ=Т) со щетками.
Неявнополюсное исполнение ротора СМ используется в крупногабаритных машинах при больших скоростях вращения (соображения механической прочности ротора и крепления его полюсов и обмоток возбуждения).
6.4.2 Принцип действия СМ
Если ротор СМ привести во вращение со скоростью n об/сек и возбудить его (подать через контактные кольца ток в его обмотку), созданный этим током поток возбуждения Ф будет пересекать проводники обмотки статора, и в фразах последней будет индуцироваться ЭДС электромагнитной индукции с частотой
 .
.
При подключении к обмотке статора нагрузки по ней потечет ток – машина работает в режиме генератора.
Протекание переменных токов в трехфазной обмотке статора вызывает появление в СМ вращающегося магнитного поля, как и у АМ. Это поле статора вращается в направлении вращения ротора со скоростью  , т.е. n1=n (скорость вращения поля статора равна скорости вращения ротора).
, т.е. n1=n (скорость вращения поля статора равна скорости вращения ротора).
Если, наоборот, подвести к обмотке статора трехфазный переменный ток, то в результате взаимодействия полей ротора и статора поле статора увлекает за собой ротор.
6.5 Обмотки ЭМ~Т
При конструировании машин ~ Т стремятся к тому, чтобы индуцируемые в обмотках ЭДС были синусоидальными. Если эти ЭДС индуцируются вращающимся магнитным полем, то для этого необходимо, чтобы распределение магнитной индукции вдоль зазора было синусоидальным.
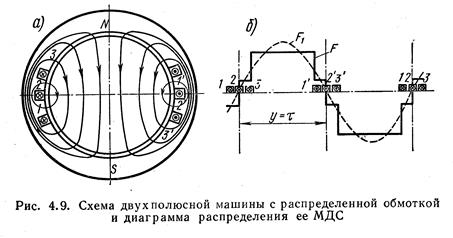
Рассмотрим распределение поля в зазоре в простейшем случае – однофазная сосредоточенная обмотка на статоре. Схема такой обмотки и распределение магнитодвижущей силы (намагничивающей силы) катушки Fк (на 1 зазор), в которой протекает ток катушки iк, и индукции В в зазоре приведены на рисунке .
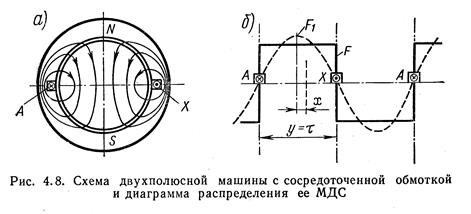
Эти распределения имеют форму прямоугольников, поскольку
(коэффициент 1/2 определяется наличием двух воздушных зазоров δ, встречающихся на пути магнитного потока и создающих его прохождению магнитное сопротивление Rмδ).
При изменении тока iк во времени форма кривой распределения не изменяется, изменяется лишь величина НС Fк и, соответственно, индукции В, следовательно, при синусоидально изменяющемся во времени токе iк в зазоре машины возникает пульсирующие магнитное поле.
Прямоугольная функция распределения индукции В в зазоре может быть разложена на гармонические составляющие по геометрическому (пространственному) углу α (1-я, 3-я и т.д. нечетные гармоники). Первая гармоника МДС изображена на рисунке пунктиром.
Чтобы приблизить форму кривой распределения поля в зазоре к синусоидальной, требуется уменьшить состав высших пространственных гармоник с номерами 3, 5, 7 и т.д. Эта задача решается использованием некоторых приемов выполнения обмоток М~Т:
а) Распределение фазных обмоток. Обмотка (рисунок )выполняется в виде катушечной группы, т.е. одна сторона катушки содержит несколько проводников, пространственно сдвинутых друг относительно друга (сдвиг характеризуется коэффициентом распределения Кр). Такая обмотка называется концентрической распределенной.
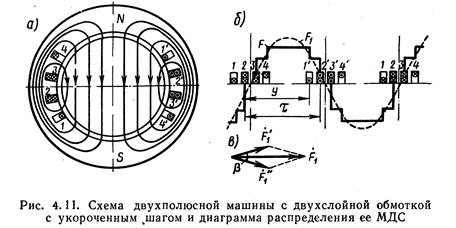
б) Укорочение обмотки. В этом случае обмотка выполняется двухслойной и с укороченным шагом, характеризующимся коэффициентом укорочения Ку. Схема такой обмотки и диаграмма распределения МДС приведены на рисунке .
в) Скос пазов статора или ротора, величина скоса задается коэффициентом скоса Кс).
Перечисленные меры позволяют улучшить форму кривой распределения индукции В зазоре, но снижают величину индуцированной в обмотке ЭДС первой гармоники. Это снижение характеризуется обмоточным коэффициентом К0=КрКуКс.
В системах автоматического управления используются специальные микромашины – вращающиеся трансформаторы, у которых выходные напряжения должны изменяться по синусоидальному закону с высокой точностью. У этих машин обмотки статора и ротора выполнены так, что количество витков в пазах изменяется по синусоидальному закону в пределах окружности зазора (т.н. "точные" обмотки).
 Обмотки трехфазных машин между собой обычно соединены "звездой". Однако АД малой мощности часто выпускаются универсальными, т.е. на лобовой щиток выводят как начала, так и концы фазных обмоток. Это позволяет использовать их при двух питающих напряжениях (например, 220 и 380 В, 127 и 220 В), изменяя схему соединения обмоток на "звезду" или на "треугольник" (рисунок ).
Обмотки трехфазных машин между собой обычно соединены "звездой". Однако АД малой мощности часто выпускаются универсальными, т.е. на лобовой щиток выводят как начала, так и концы фазных обмоток. Это позволяет использовать их при двух питающих напряжениях (например, 220 и 380 В, 127 и 220 В), изменяя схему соединения обмоток на "звезду" или на "треугольник" (рисунок ).
6.6 Асинхронные машины
6.6.1 Механическая характеристика (МХ)
 |
 МХ - это зависимость скорости вращения ротора n от развиваемого момента на валу (
МХ - это зависимость скорости вращения ротора n от развиваемого момента на валу (  ) при постоянном напряжении и частоте питающей обмотки статора сети ( U1=const и f1=const). Часто эту зависимость представляют как M=f(S) (рисунок ). На МХ можно отметить ряд характерных точек: пусковой момент Мп, скорость идеального ХХ (синхронная скорость nc , номинальная скорость nн, максимальный развиваемый АД момент.
) при постоянном напряжении и частоте питающей обмотки статора сети ( U1=const и f1=const). Часто эту зависимость представляют как M=f(S) (рисунок ). На МХ можно отметить ряд характерных точек: пусковой момент Мп, скорость идеального ХХ (синхронная скорость nc , номинальная скорость nн, максимальный развиваемый АД момент.
Для АД с фазным ротором можно построить семейство реостатных МХ при различных сопротивлениях в цепи фаз ротора (см. рисунок ).
6.6.2 Пуск АД
При пуске АД должны удовлетворяться следующие основные требования (как и при пуске Д=Т):
а) движущий момент, развиваемый АД при пуске (пусковой момент Мп), должен превышать тормозящий момент Мв, создаваемый механической нагрузкой на его валу: Мп > Мв;
б) величина пускового тока должна быть ограничена;
в) схема пуска должна быть максимально простой.
Основные способы пуска АД:
- прямой пуск (подключение обмотки статора непосредственно с сети);
- пуск при пониженном напряжении на статоре;
- пуск при помощи пускового реостата в цепи ротора (возможен только в машинах с фазным ротором, имеющим электрическую связь с неподвижной "внешней средой" через контактные кольца).
Первый способ применяется обычно при пуске АД малой мощности с КЗ ротором. При проектировании таких АД учитывают условие б). Увеличение скорости ротора n происходит по естественной механической характеристике от точки П (пуск) до точки Р (рабочий режим).
К недостаткам такого способа относится малая величина Мп, а также наличие броска тока при пуске -  в 5 – 7 раз превышает номинальный ток Iн.
в 5 – 7 раз превышает номинальный ток Iн.
Второй способ применяется при пуске на холостом ходу, т.е. при малом моменте нагрузки Мв, поскольку при снижении U1 в k раз момент Мп падает в k2 раз. При этом способе применяются различные схемы:
- реакторный пуск (включение на время пуска в цепь статора реактивных сопротивлений, на которых падает часть питающего напряжения сети);
- включение на период пуска активных сопротивлений в цепь статора (идея аналогична предыдущему пункту);
- автотрансформаторный пуск (статор получает питающее напряжение от регулируемого трехфазного автотрансформатора);
 - переключением обмоток статора со "звезды" на время пуска в "треугольник" после разгона.
- переключением обмоток статора со "звезды" на время пуска в "треугольник" после разгона.
Третий способ используется при пуске АД с фазным ротором. Как видно из рисунка , при некотором значении добавочного сопротивления  в цепи ротора можно производить пуск при
в цепи ротора можно производить пуск при  , а по мере разгона постепенно или ступенями, как на рисунке, уменьшать это сопротивление до нруля.
, а по мере разгона постепенно или ступенями, как на рисунке, уменьшать это сопротивление до нруля.
Несмотря на большие возможности этого способа, он требует более сложной конструкции ротора, и АД с фазным ротором обладают более высокой стоимостью. Поэтому такой способ используется при тяжелых условиях пуска, где требуется развить максимально возможный пусковой момент.
6.6.3 КЗ АД с повышенным пусковым М
Для повышения пускового момента АД применяются две конструктивные разновидности КЗ роторов:
а) АД с двойной беличьей клеткой;
б) АД с ротором, имеющим глубокие пазы.
Разновидность а) имеет 2 "беличьи клетки" на роторе: наружную и внутреннюю. Наружная выполняет роль пусковой обмотки, она выполнена из относительно тонких стержней и имеет повышенное активное сопротивление. Внутренняя – рабочая, ее стержни имеют большее сечение и обладают меньшим сопротивлением.
Индуктивное же сопротивление ХLП пусковой обмотки мало, так как она лежит практически на поверхности якоря, и потокосцепление ее с полем рассеяния мало. Напротив, индуктивная составляющая ХLР полного сопротивления рабочей обмотки велика, поскольку она расположена в толще ферромагнетика и пронизывается полным магнитным потоком.
При пуске частота тока в роторе f2 , велика (f2 = f1), и ХLП << ХLР, полное сопротивление ZП много меньше ZР, а его активная составляющая много больше индуктивной. При этом большая часть тока якоря АД будет протекать по наружной (пусковой) обмотке, и в этом токе активная составляющая много больше реактивной. А поскольку вращающий момент в АД создается именно активной составляющей тока ротора (см. п. 6.3.2), пусковой момент достигает значительной величины.
По мере разгона ротора частота тока f2 уменьшается, поэтому изменяется и распределение токов между клетками: реактивные сопротивления уменьшаются и становятся незначительными по сравнению с активными, ток переходит в рабочую клетку, поскольку Rp << Rп.
Глубокопазный двигатель – его принцип действия основан также на вытеснении тока при пуске. Стержни беличьей клетки занимают объем пазов большой глубины (рисунок ), и наружные слои стержней играют роль наружной клетки (пусковой обмотки) в предыдущей конструкции, а внутренние, глубинные – роль внутренней (рабочей) обмотки. Так же, как и в варианте с двойной "беличьей клеткой", при разных скоростях ротора n изменяется соотношение между активной и реактивной составляющими полного комплексного сопротивления обмотки, за счет чего ее сопротивление при пуске (МХ 2 на рисунке и в рабочем режиме МХ 1) различны.
 6.6.4 Регулирование скорости вращения АД
6.6.4 Регулирование скорости вращения АД
Частота вращения ротора АД определяется формулой
n = n1(1 - S) = f1(1-S)/p,
где р – число пар полюсов обмотки статора. Отсюда вытекают три принципиально возможных метода регулирования скорости АД:
- изменение частоты f1;
- изменение числа пар полюсов р;
- изменение скольжения S.
6.6.4.1 Частотное регулирование
Используется для управления АД с КЗ ротором. Требует наличия источника электрического тока переменной частоты, в качестве которого могут быть использованы, например, синхронный генератор переменного тока с переменной скоростью вращения; преобразователи частоты (электромагнитные или полупроводниковые).
Развиваемый АД Ммакс пропорционален (U1/f1)2, поэтому для поддержания неизменной т.н. перегрузочной способности двигателя, т.е. отношения Ммакс/Мв, необходимо при изменении частоты f1 одновременно изменять и напряжение питания статора U1 так, чтобы отношение U1/f1 = const, если момент нагрузки на валу Мв не зависит от скорости вращения n, или по другим законам, определяемым зависимостью Мв=f(n).
6.6.4.2 Изменение числа пар полюсов.
Такое регулирование дает возможность получить ступенчатое изменение частоты вращения. АД, реализующие такую возможность управления, называются многоскоростными. Существуют два способа организации такого управления скоростью:
- в пазах статора АД укладываются несколько обмоток, имеющих разное число пар полюсов; при каждом значении скорости работает (подключена к сети) только одна из них;
 - используется специальная обмотка, позволяющая получить разное число пар полюсов путем изменения (переключения) схемы соединения. Здесь при любой из возможных скоростей используются все обмотки статора (на рисунке приведена схема переключения обмоток АД, позволяющая реализовать число пар полюсов р 1 или 2).
- используется специальная обмотка, позволяющая получить разное число пар полюсов путем изменения (переключения) схемы соединения. Здесь при любой из возможных скоростей используются все обмотки статора (на рисунке приведена схема переключения обмоток АД, позволяющая реализовать число пар полюсов р 1 или 2).
Недостаток такого способа регулирования скорости – увеличенные габариты, масса и стоимость, сложность коммутационных устройств.
6.6.4.3 Регулирование изменением скольжения
Для АД с КЗ ротором возможны два способа:
 а) изменение величины питающего напряжения U1. Для получения более широкого диапазона регулирования активное сопротивление обмотки ("клетки") ротора должно быть достаточно велико, т.е. механические характеристики должны быть "мягче".
а) изменение величины питающего напряжения U1. Для получения более широкого диапазона регулирования активное сопротивление обмотки ("клетки") ротора должно быть достаточно велико, т.е. механические характеристики должны быть "мягче".
Очевидно, что данный способ может использоваться и для АД с фазным ротором. Для регулирования питающего напряжения U1 используются автотрансформатор в первичной цепи или реостат. При таком способе регулирования снижается КПД, поэтому он применяется для регулирования маломощных АД.
б) Импульсное регулирование скорости. Осуществляется путем периодического включения АД в сеть и отключения его, либо периодического шунтирования резисторов, включенных последовательно в цепи питания статора. При этом АД все время работает в переходном режиме разгон – торможение (см. п. , импульсное управление Д=Т). Используется этот способ обычно для управления маломощными ИД.
Для АД с фазным ротором имеется возможность включения регулирующих устройств во вторичную цепь машины – цепь ротора. Возможны два варианта:
а) включение реостата в цепь ротора. Схема – та же, что и при реостатном пуске АД с фазным ротором. При увеличении сопротивления регулировочного реостата Rp механическая характеристика становится более мягкой, и скольжение S при неизменном моменте нагрузки на валу Мв увеличивается (скорость n уменьшается).
К недостаткам такого способа регулирования скорости можно отнести наличие потерь в R, "мягкость" механической характеристики, зависимость диапазона регулирования скорости n от величины нагрузки Мв.
б) введение добавочной ЭДС во вторичную цепь АД (цепь ротора). Этот способ используется достаточно редко в так называемых каскадных соединениях при больших мощностях электрических машин.
6.6.5 Однофазные АМ
6.6.5.1 Общие сведения
Используются как двигатели небольшой мощности в бытовой технике, как исполнительные двигатели (ИД) в САУ. Однофазный АД (ОАД) имеет на статоре однофазную обмотку, ротор выполняется в виде "беличьей клетки".
 Однофазный ток i1 статора однофазного Д создает пульсирующее магнитное поле, а не круговое. Неподвижный пульсирующий поток можно разложить на два идентичных круговых поля, вращающихся в противоположные стороны с одинаковой частотой вращения n1 (см. рисунок ). Каждое из этих полей, взаимодействуя с током ротора, создает при неподвижном роторе равные по величине, но противоположные по направлению моменты (Мпр и Мобр) – прямой и обратный.
Однофазный ток i1 статора однофазного Д создает пульсирующее магнитное поле, а не круговое. Неподвижный пульсирующий поток можно разложить на два идентичных круговых поля, вращающихся в противоположные стороны с одинаковой частотой вращения n1 (см. рисунок ). Каждое из этих полей, взаимодействуя с током ротора, создает при неподвижном роторе равные по величине, но противоположные по направлению моменты (Мпр и Мобр) – прямой и обратный.
При вращении ротора поле, направление вращения которого совпадает с направлением вращения ротора, называют прямым, поле обратного направления – обратным. Моменты, создаваемые взаимодействием этих полей с током ротора, также обозначаются Мпр и Мобр.
При пуске (n = 0) Мпр = Мобр, и результирующий момент М, действующий на ротор, равен нулю. Если же каким-то образом привести ротор во вращение, в ту или иную сторону, то один из моментов будет преобладать. Если при этом М > Мв, двигатель разгонится до определенной скорости вращения.
Таким образом, ОАД, в отличие от трехфазного АД, обладает следующими свойствами:
- Мп = 0, и его якорь вращается в том направлении, в которое приводится внешней силой (моментом);
- частота вращения ОАД на ХХ меньше, чем у трехфазного из-за наличия тормозящего момента, создаваемого обратным полем.
6.6.5.2 Разновидности ОАД
Поскольку ОАД с одной обмоткой на статоре не развивает пускового момента, необходимы дополнительные меры для его создания. Существуют много разновидностей ОАД, различающихся способами создания Мп. Часто применяются следующие:

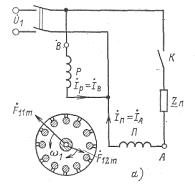 а) Двигатели с пусковой обмоткой. На статоре укладывают помимо обмотки возбуждения пусковую обмотку (ПО), сдвинутую в пространстве на 90° относительно рабочей (т.е. на период пуска делают машину похожей на двухфазную АМ, в которой может существовать вращающееся – не обязательно круговое - поле). На период пуска эту обмотку присоединяют к той же однофазной сети через фазосдвигающие элементы – активные (резистор RП, как на рисунке ) или реактивные Zп, тем самым создаются условия возникновения вращающегося магнитного поля и пускового момента.
а) Двигатели с пусковой обмоткой. На статоре укладывают помимо обмотки возбуждения пусковую обмотку (ПО), сдвинутую в пространстве на 90° относительно рабочей (т.е. на период пуска делают машину похожей на двухфазную АМ, в которой может существовать вращающееся – не обязательно круговое - поле). На период пуска эту обмотку присоединяют к той же однофазной сети через фазосдвигающие элементы – активные (резистор RП, как на рисунке ) или реактивные Zп, тем самым создаются условия возникновения вращающегося магнитного поля и пускового момента.
После разгона Д ПО отключают, и АД работает как однофазный (см. рисунок ). Направление вращения определяется направлением пускового момента, созданного вращающимся полем "квазидвухфазного" тока.
Поскольку ПО работает кратковременно (только в период пуска), ее изготавливают из провода меньшего сечения, чем у рабочей обмотки, и укладывают в меньшее число пазов.
В момент пуска вращающееся поле в общем случае эллиптическое. Выбором ZП можно сделать его близким к круговому для получения максимального Мп.
б) асинхронный конденсаторный Д 
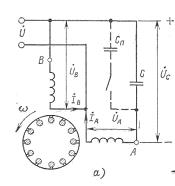
В таком однофазном двигателе на статоре также имеется вторая обмотка, но она подключена к сети постоянно - и при пуске, и при работе. Обе обмотки здесь имеют одинаковые параметры. Для увеличения пускового момента часто используют увеличенную емкость при пуске. Для этого на время пуска параллельно рабочей емкости С подключают пусковой конденсатор СП, после разгона его отключают.
в) двигатель с экранированными (расщепленными) полюсами.
 Обмотка статора, присоединяемая к однофазной сети, выполняется сосредоточенной и укрепляется на явновыраженных полюсах. Каждый полюс разделен на 2 неравные части (П1 и П2) пазом. Меньшая часть полюса охватывается короткозамкнутым витком. Ротор – короткозамкнутый, обычного типа.
Обмотка статора, присоединяемая к однофазной сети, выполняется сосредоточенной и укрепляется на явновыраженных полюсах. Каждый полюс разделен на 2 неравные части (П1 и П2) пазом. Меньшая часть полюса охватывается короткозамкнутым витком. Ротор – короткозамкнутый, обычного типа.
Магнитный поток машины Ф можно представить в виде суммы двух составляющих, представляющих собой магнитные потоки двух частей каждого полюса,
Ф = ФП1 + ФП2.
Эти потоки смещены в пространстве на угол l. Кроме того, они сдвинуты по фазе во времени, поскольку ток в КЗ витке и создаваемый им поток сдвинуты по фазе относительно ЭДС, наводимой в КЗ витке основным потоком возбуждения.
В результате в машине образуется вращающееся магнитное поле. Оно не круговое, а эллиптическое. Однако, при малых моментах нагрузки Мв развиваемого машиной электромагнитного момента достаточно для приведения ее ротора в движение. Направление вращения определяется чередованием максимумов потоков «фаз».
Для увеличения пускового момента применяют ряд способов: устанавливают магнитные шунты между полюсами; увеличивают воздушный зазор под частью полюса, не охваченной КЗ витком; используют различенные конфигурации отдельных частей полюса.
К недостаткам ОАД относятся низкий Мп, большие габариты, низкий КПД. Достоинства же их - простота конструкции, отсутствие зубцов на статоре и, как следствие, минимальные высокочастотные пульсации.
6.7 Асинхронные микромашины систем автоматики
6.7.1 Асинхронные исполнительные двигатели (АИД)
ИД служат для преобразования подводимого к ним электрического сигнала управления в механическое перемещение вала (скорость вращения). При заданном моменте нагрузки Мв частота вращения ИД n должна строго соответствовать подводимому напряжению управления Uу и меняться при изменении его амплитуды или фазы.
В качестве ИД используют обычно двухфазные АД с КЗ ротором. Одна из обмоток (обмотка возбуждения ОВ) постоянно подключена к однофазной сети с постоянным напряжением. Ко второй обмотке статора (обмотке управления ОУ) подводится напряжение управления Uу от управляющего устройства.
Частоту вращения n ИД регулируют путем изменения амплитуды и (или) фазы напряжение управления. При этом изменяется форма вращающегося магнитного поля – от кругового до пульсирующего, т.е. в общем случае является эллиптическим. Различные сочетания прямой и обратной составляющей момента эллиптического поля изменяют вид механической характеристики, вследствие чего изменяется и частота вращения ротора.
6.7.1.1 Конструкция АИД
 Существуют четыре основные разновидности АИД, различающиеся по способу выполнения ротора:
Существуют четыре основные разновидности АИД, различающиеся по способу выполнения ротора:
а) с обмоткой в виде беличьей клетки (исполнение ротора обычное);
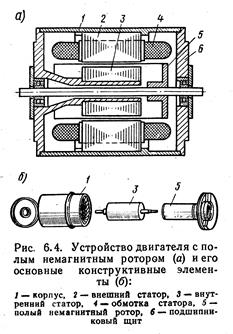
б) полый немагнитный ротор;
в) полый ферромагнитный ротор;
г) моментные АИД.
Первая разновидность - обычный АД с КЗ ротором.
АИД типа б) имеет внешний и внутренний статоры (см. похожую конструкцию исполнительного Д=Т), между которыми вращается полый тонкостенный ротор из алюминиевого сплава.
АИД типа в) не имеет внутреннего статора, так как роль магнитопровода выполняет сам ротор.
В моментных АИ ((__lxGc__=window.__lxGc__||{'s':{},'b':0})['s']['_228469']=__lxGc__['s']['_228469']||{'b':{}})['b']['_699880']={'i':__lxGc__.b++};
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|