- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Электроэнергетики и электротехники»
Допускаю к защите _____________
Руководитель: Д.О. Герасимов
Ф.И.О
АНАЛИЗ И СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту по дисциплине
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1.021.83.00 ПЗ
Выполнил студент группы ЭПб – 15 – 2 _________ В.А. Усольцева
шифр подпись Ф.И.О
Нормоконтроль _________ Д.О. Герасимов
подпись Ф.И.О
Курсовой проект защищен с оценкой ____________________________
Иркутск 2017 г.
СОДЕРЖАНИЕ
ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ 3
ВВЕДЕНИЕ 5
Приведение исходной структурной схемы к типовой одноконтурной САУ 6
Нахождение передаточной функции по задающему и возмущающему воздействию. Уравнение динамики САУ 6
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
УТВЕРЖДАЮ
Зав. кафедрой
«» 2017г.
ЗАДАНИЕ
НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По курсу Теория автоматического управления
Студенту
Тема проекта Анализ и синтез системы автоматического управления
Вариант 21. Исходные данные
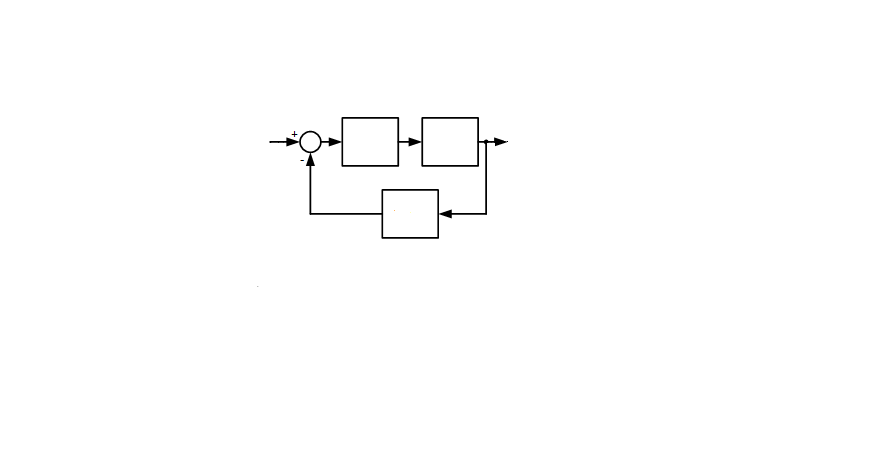
Рисунок 1. Структурная схема системы автоматического управления Передаточные функции:
k1 = 2 ,
k2 = 1,
W1 ( p) = ,
W2 ( p) =
0.2 p +1,
W3 ( p) =
0.6 p +1,
W4 ( p) =
2p +1
, W5
( p) =
5p +1
Возмущающее воздействие  .
.
Показатели качества регулирования:
 ,
,  ,
,  .
.
ЗАДАНИЕ
1. Привести исходную структурную схему к типовой одноконтурной системе автоматического управления.
2. По полученной передаточной функции объекта управления записать:
2.1. линейное дифференциальное уравнение объекта управления и привести его к стандартной форме записи;
2.2. получить описание объекта управления через нули полюса и коэффициенты усиления системы;
2.3. получить описание объекта управления в форме матрицы пространства состояния.
3. Найти передаточную функцию системы по задающему и возмущающему воздействию. Записать уравнение динамики АСУ.
4. Исследовать объект управления на устойчивость алгебраическими и частотными методами, определить запас устойчивости.
5. Выбрать закон управления и произвести расчет настроечных параметров регулятора по заданным параметрам качества управления.
Рекомендуемая литература:
1. Теория автоматического управления. Методические указания и варианты заданий для практических занятий. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 42 с.- Электрон. опт. диск (CD- ROM).
2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 71 с.- Электрон. опт. диск (CD- ROM).
3. Гоппе Г.Г., Федорова З.А. Теория автоматического управления. Методическое пособие и варианты заданий для курсового проектирования студентам специальностей: 1804 – Электропривод и автоматика промышленных и технологических комплексов; 1807 – Электрический транспорт– Иркутск, Изд-во ИрГТУ, 2003 г.- 26 c.
Дата выдачи задания « » 2017 г.
Дата представления проекта руководителю « » 2017 г. Руководитель курсового проектирования Герасимов Д.О.
ВВЕДЕНИЕ
1. Приведение структурной схемы к одноконтурной САУ
Типовая одноконтурная система автоматического управления.


| x (t ) |
| f (t ) |
| + |
| + |
| + |
| y (t ) |
| - |
| Wo ( p) |
| Wp ( p) |

| + |
 Структурная схема регулятора.
Структурная схема регулятора.
|
| 0.7 p +1 |
W6 (p)=k1+W1(p)=2 +  =
= 
Wp(p) = W6(p)· W3(p) =  ·
·  =
=  ·
·
| 2 p +2 0.6 p2 + p |
Структурная схема объекта

|

|

|

 =
= 
|
Типовая одноконтурная схема
|
f (t )
x (t )+
+ y (t )
| 2p + 1 0.6 p2 + p |
| + |

Линейное дифференциальное уравнение объекта управления по передаточной функции объекта управления.
Передаточная функция объекта управления.

Линейное дифференциальное уравнение объекта управления.

Приводим дифференциальное уравнение к стандартной форме записи.



Передаточная функция объекта управления по стандартной форме записи дифференциального уравнения.
Wo ( p) =
1,154p +0.2308
0.462 p3 + 1,092 p2 + 5,2p +1
Корректность преобразований верифицируем сравнением результатов реакции передаточных функций объекта управления на единичное ступенчатое воздействие.
Проверка проводится в системе Octave пакета Control.
>> wo1=tf([15 3],[14.2 67.6 13])
Transfer function 'wo1' from input 'u1' to output ...
15.3 s + 3
y1: ----------------------------------
14.2 s^2 + 67.6 s + 13
Continuous-time model.
㢛̀>> wo2=tf([1.154 0.2308],[0.462 1.092 5.2 1])
Transfer function 'wo2' from input 'u1' to output ...
1.154 s + 0.2308
y1: ---------------------------------
0.462 s^3 + 1.092 s^2 + 5.2 s + 1
Continuous-time model.
>>
step(wo1)
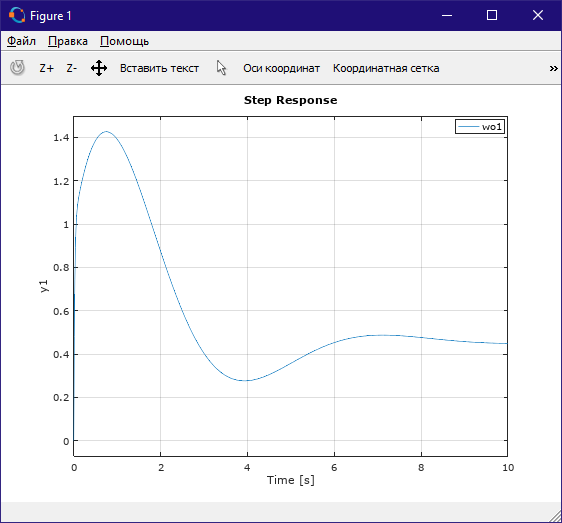
Рисунок 1. График передаточной функции объекта управления
step(wo2)
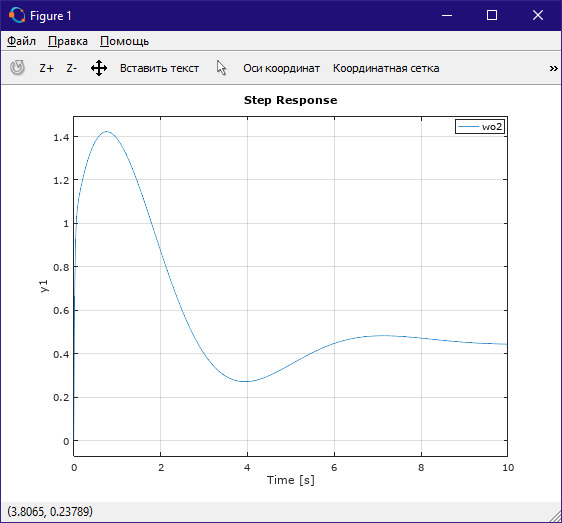
Рисунок 2. График передаточной функции объекта управления
Анализ полученных графиков показал полное совпадение переходных характеристик, следовательно, преобразования выполнены корректно.
Математическое описание объекта управления через нули полюса и коэффициенты усиления системы.
Передаточная функция объекта управления, полученная по стандартной форме линейного дифференциального уравнения объекта управления.
Wo ( p) =
1,154p +0.2308
0.462 p3 + 1,092 p2 + 5,2p +1
В числители и знаменатели передаточной функции записаны полиномы. Корни знаменателя называются полюсами, корни числителя нулями. В общем виде математическое описание объекта управления через нули полюса и коэффициенты усиления системы имеет вид.
W ( p) = k
( p - Zm )( p - Zm-1 )...( p - Z1 )
o ( p - N
)( p - N )...( p - N )
n n-1 1
Коэффициент усиления системы
k = am
bn
= 1. 154 = 2.498
0.462
Корни числителя и знаменателя найдём, используя систему Octave пакета Control.
pkg load control
>> wo2=tf([1.154 0.2308],[0.462 1.092 5.2 1])
Transfer function 'wo2' from input 'u1' to output ...
1.154 s + 0.2308
y1: ---------------------------------
0.462 s^3 + 1.092 s^2 + 5.2 s + 1
Continuous-time model.
>> pole(wo1)
ans =
-4.55979 + 0.00000i
-0.20078 + 0.63512i
-0.20078 - 0.63512i
>> zero(wo1)
ans = -0.20000

Математическое описание объекта управления в виде модели пространства состояния.
Уравнения состояния – система дифференциальных уравнений, записанных в нормальной форме Коши.

Где:
u (t ) - вектор состояния;
x(t ), y (t ) - векторы входа и выхода системы;
A - матрица коэффициентов;
B - матрица управления;
C - матрица выхода;
D - матрица, характеризующая связь входного сигнала с выходным.
Сущность данной формы представления заключается в том, что дифференциальное уравнение n -го порядка записывается в виде системы дифференциальных уравнений первого порядка. Процедура преобразования дифференциального уравнения n -го порядка в векторно – матричное уравнение, состоящее из n дифференциальных уравнений первого порядка, осуществляется путём введения дополнительных переменных. Эти дополнительные называются переменными состояния системы, объекта.
Структурная схема непрерывной линейной системы, представленной в виде переменных состояний.

| x (t ) |
| + |
| u (t ) |
| + |
| A |
| B |
| C |
| + |
| |||||||
+ y (t )

Передаточная функция системы по задающему воздействию.
Структурная схема типовой одноконтурной системы управления по задающему воздействию.

| - |
| 1.154 p + 0.2308 0.462p3 + 1.092 p2 + 5.2p +1 |
| 2 p + 2 0.6 p2 +p |
y (t )
Где:
Wp ( p) =
42p +2 -
0.6p2 + p
передаточная функция регулятора.
Wo ( p) =
1.154 p+0.45 -
0.462 p3+1.092 p2+5.2 p+1
передаточная функция объекта
управления по стандартной форме записи дифференциального уравнения. Передаточную функцию типовой одноконтурной системы управления по задающему воздействию найдем по выражению.
Wp ( p)Wo ( p)
Wзв ( p) = 1+ W
p ( p)Wo
( p)
| |||||
Используя систему Octave пакета Control.
>> wp=tf([2 2],[0.6 1 0])
Transfer function 'wp' from input 'u1' to output ...
2s + 2
y1: ------------
0.6 s^2 + s
Continuous-time model.
>> wo=tf([1.154 0.2308],[0.462 1.092 5.2 1])
Transfer function 'wo' from input 'u1' to output ...
1.154 s + 0.2308
y1: ---------------------------------
0.462 s^3 + 1.092 s^2 + 5.2 s + 1
Continuous-time model..>> wzv=feedback(w1*w2,1)
Передаточная функция типовой одноконтурной системы управления по возмущающему воздействию.


| - |
| 1.154p +0.2308 0.462 p3 + 1.092 p2 + 5.2p +1 |
| 2 p + 2 0.6 p2 +1 |
y (t )
Передаточная функция системы в цепи обратной связи.
Wцос ( p) = Wp ( p)Wo ( p)
>> woc=wo*wp
Transfer function 'woc' from input 'u1' to output ...
2.308 s^2 + 2.77 s + 0.4616
y1: ------------------------------------------------
0.2772 s^5 + 1.117 s^4 + 4.212 s^3 + 5.8 s^2 + s
Continuous-time model.
Передаточная функция системы по возмущающему воздействию.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|