- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Сбор первичных данных
Другой способ распределения функций обработки и доступа к различным массивам реализует структура на рис. 4.28,г. На основе функционирования централизованной или децентрализованной системы сбора данных формируется единый банк данных, к которому могут иметь доступ различные СОД и органы управления системы испытаний. В структуре две ЭВМ осуществляют предварительную обработку и управление банком данных, а центральная ЭВМ выполняет полную обработку.
Для рассредоточенных систем характерно использование на том или ином уровне специальных систем связи или передачи данных. Возможен также обмен данными посредством транспортировки к местам обработки или передачи данных машинных носителей информации с последующим вводом ее в ЭВМ. В системах испытаний рассредоточенные ССО ЭД используются при проведении совокупности взаимосвязанных испытаний на различных, удалённых друг от друга испытательных стендах. В этом случае происходит распределение функции сбора первичных данных.
Распределение функций обработки данных возможно при использовании удалённых друг от друга ЭВМ (вычислительных центров).
Структура ССО ЭД для системы испытаний с большой разобщённостью элементов (рис. 21) имеет три основных тракта сбора ЭД — наземная ССД, бортовая ССД с телеметрическим каналом передачи информации и средствами накопления данных на машинных носителях, а также тракт траекторных измерений в виде наземной системы наблюдения и сбора данных Обмен информацией между элементами ССО ЭД осуществляется автоматическими системами передачи информации, неавтоматическими системами передачи информации, либо неавтоматическими средствами (пунктирные линии).
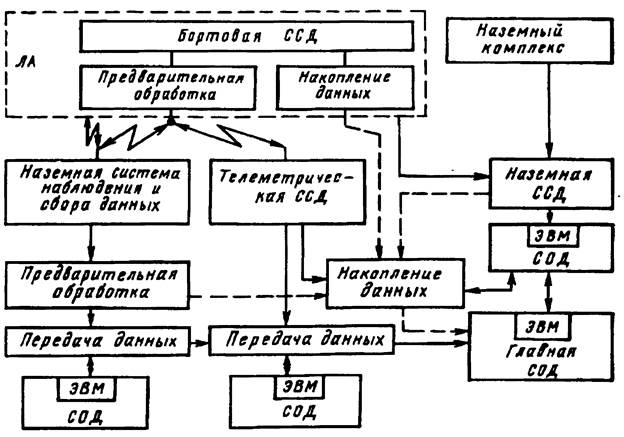
Рис. 21. Распределенная ССО ЭД
Сбор первичных данных
Сбор первичных данных (СПД), или просто сбор Данных, заключается в периодическом опросе состояний первичных преобразователей (датчиков) с целью ввода в ССО ЭД, последующего преобразования и измерения параметров сигналов. При соблюдении необходимых метрологических, энергетических и других требований, также необходимо обеспечить требуемую полезность данных при минимальных аппаратных средствах и объёме служебной информации.
Полезность данных задаёт требуемую частоту опроса датчиков и определяется исходя из заданной точности измерений или быстродействия управления испытанием.
Точность измерения, согласно теореме Котельникова, устанавливает предельно высокий допустимый промежуток времени Δti, через который необходимо замерять значения параметров сигналов xi(t) с частотным спектром Wi - Δti ≤ 1/2 Wi. Уменьшение Δti приводит к избыточности информации, а увеличение — к снижению точности.
Быстродействие управления задаётся максимально допустимым временем реакции системы tp на изменение состояния объекта управления. Время реакции учитывает необходимые временные затраты:
- на сбор параметров состояния испытываемого объекта (tсб);
- на передачу данных (tпep);
- на оценку состояния и принятие решения (tреш);
- на формирование, доведение и исполнение решения (tисп - Δt ≤ tсб + tпер + tреш + tисп).
Уплотнение каналов данных состоит в использовании одного и того же многозадачного рабочего устройства (АЦП, канала передачи данных, ЭВМ и т.п.) для обслуживания различных параметров, абонентов и задач (измерения, передачи или обработки данных). Уплотнение достигается за счёт избытка возможностей уплотняемого средства по определённому виду обслуживания одного или группы потребителей.
В ССД такая избыточность может оцениваться разностью между требуемой периодичностью опроса датчиков Δti и временем обслуживания τобслi данных этого датчика в уплотняемом средстве. Объединение первичных (неуплотнённых) каналов в уплотнённый (групповой) осуществляется соответствующими средствами к которым относятся коммутационные устройства (коммутаторы или мультиплексоры). В определённых случаях эту задачу могут выполнять интерфейсы или многоканальные АЦП и ИП.
Поскольку группирование (коммутация) требует определённых временных затрат, то реальная избыточность зависит и от быстродействия устройства группирования τгр.
В общем случае τгр зависит от вида первичных каналов, их числа и имеет две основные составляющие — время переключения и время управления (определения подключаемого канала) τгр = τпер + τупр. В системах СПД τобслi зависит от времени преобразования τпрi, группирования (коммутации) τгрi, и измерения τизмi, причём учитываются и необходимые выдержки на переходные процессы: τобслi = τпрi + τгрi + τизмi. Число уплотняемых каналов Ny за один цикл сбора данных определяется соотношением:
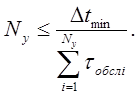
Здесь  — наименьшее значение Δti для всех датчиков, опрашиваемых в данном цикле. Для обеспечения эффективного сбора данных без избытка каждый из циклов должен иметь переменную длину и состав измеряемых параметров, причём определение этого состава и порядка должно производиться с учетом Δti для каждого датчика и момента времени предшествующего опроса этого датчика.
— наименьшее значение Δti для всех датчиков, опрашиваемых в данном цикле. Для обеспечения эффективного сбора данных без избытка каждый из циклов должен иметь переменную длину и состав измеряемых параметров, причём определение этого состава и порядка должно производиться с учетом Δti для каждого датчика и момента времени предшествующего опроса этого датчика.
Осуществление такого алгоритма требует сложных аппаратных и программных средств. Поэтому на практике применяются некоторые варианты этого случая, различающиеся степенью избыточности, возможностью изменения состава и длительности цикла опроса.
Наиболее просты аппаратным исполнением является так называемый метод циклического опроса с постоянным числом опрашиваемых параметров N и постоянным временем цикла опроса Tц. При различных  здесь будет иметь место временная избыточность, равная
здесь будет иметь место временная избыточность, равная 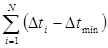 . При одинаковых Δti избыточность будет равна нулю. На практике это условие не соблюдается, и для уменьшения избыточности информации применяют отдельные конструктивные и алгоритмические методы. В частности, используется циклический опрос, когда один и тот же датчик за время цикла опрашивается Ni число раз (Ni = 1,2,3,...) через промежуток времени Δti ≤ Δt.
. При одинаковых Δti избыточность будет равна нулю. На практике это условие не соблюдается, и для уменьшения избыточности информации применяют отдельные конструктивные и алгоритмические методы. В частности, используется циклический опрос, когда один и тот же датчик за время цикла опрашивается Ni число раз (Ni = 1,2,3,...) через промежуток времени Δti ≤ Δt.
На рис. 22 представлена временная диаграмма цикла. Здесь второй и пятый датчики обслуживаются два раза за цикл опроса, первый обслуживается три раза, а остальные — по одному разу. Конструктивно такая диаграмма может быть получена объединением входов устройства группирования (рис. 23). При ограниченном числе входов коммутаторов применяются многоступенчатые коммутаторы, в которых выходы устройств нижнего уровня подключены к входам устройств следующих высших уровней (рис. 24). Здесь требуется одновременность работы коммутаторов различных уровней.
Вторую группу методов опроса составляют адресные методы, когда в каждый момент времени выбор датчика осуществляется по адресу, выдаваемому устройством управления системы уплотнения на основании программы опроса. Эта программа может быть заложена заранее или создаваться в ходе опроса, в зависимости от результатов обработки или хода процесса испытаний. Осуществление этого метода возможно при использовании, например, коммутаторов с адресным режимом работы или программируемых коммутаторов. При этом увеличиваются затраты времени на передачу, ввод адреса (программы) и выполнение необходимых переключений. На рис. 25 представлена схема двухступенчатого устройства группирования, содержащего программируемые коммутаторы. Схема осуществляет диаграмму опроса датчиков, показанную на рис. 22.
В соответствии с приведенным на рис. 25 распределением датчиков по коммутаторам нижнего уровня, программы их работы (номера подключаемых входов), осуществляемые при обращении к ним устройства управления, имели бы следующий вид: для К11 1,2,3,4,1,2,4; для К12 1,2,3,4,1. Программа коммутатора второго уровня по тактам цикла имела бы вид 1,1,1,1,1,2,2,1,1,2,2,2.
Третью группу составляют комбинированные методы уплотнения, которые сочетают адресный метод, как правило при выборе отдельных коммутаторов, и последовательный циклический опрос подключённой группы датчиков. В этом случае упрощается выполнение циклического опроса и снижаются затраты времени на управление.
Адресный опрос датчиков и изменение программы опроса в ходе испытаний порождают ещё одну проблему. Она заключается в распознавании данных в групповом канале при разделении его на несколько каналов — определении принадлежности данных к тому или иному источнику.
При неизменной программе опроса (наборе типовых программ) кадр (массив) данных группового канала может иметь лишь признак начала кадра (НК) и его типа. Принадлежность отдельных порций данных внутри кадра определяется их позициями в нём, которые не меняются и заранее известны.
Если стандартный кадр имеет неполную длину, например начинается не с первой позиции или оканчивается не на последней, то кадр содержит признак конца (КК) и адрес начальной позиции. Этого достаточно для расшифровки кадра.
При произвольной программе опроса помимо признаков начала и конца кадра необходимо указать и адрес (номер) датчика М.
На рис. 26 показана структура распределителя информации группового кадра фиксированной длины, содержащего k сообщений первичных источников (каналов), каждое из которых содержит адрес этого источника и информационную часть.
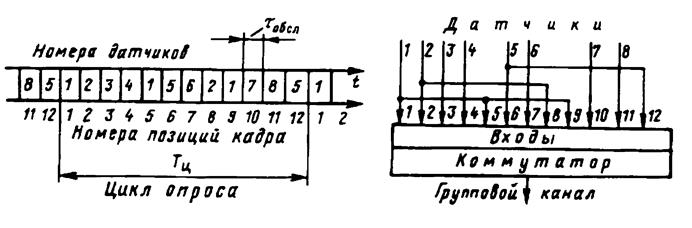
Рис. 22. Диаграмма нерегулярного Рис. 23. Схема объединения
цикла опроса входов коммутатора
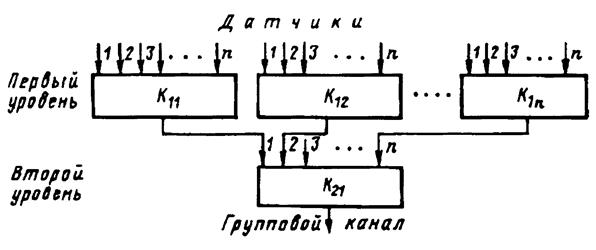
Рис. 24. Схема многоступенчатого группирования
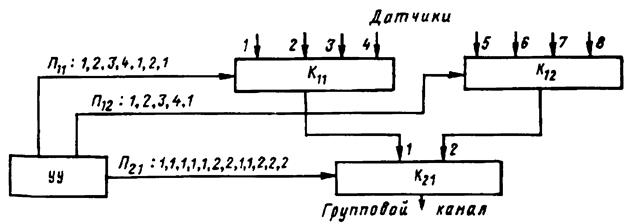
Рис. 25. Схема программируемого коммутатора
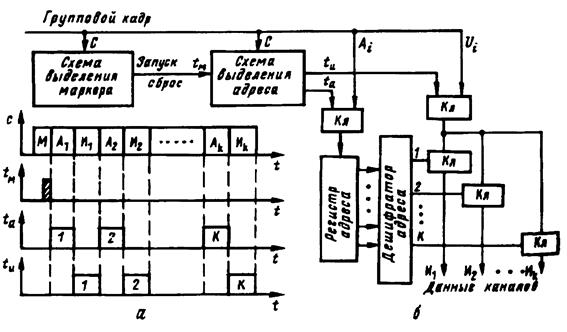
Рис. 26. Схема дешифрации кадра:
а - диаграмма распределения; б - структура распределителя
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|