- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Практическое занятие № 11. Чтение кинематической схемы токарного станка. Краткие теоретические сведения. Уравнение кинематического баланса
Практическое занятие № 11
Чтение кинематической схемы токарного станка
Цель работы:прочитать кинематическую схему токарного станка.
Краткие теоретические сведения
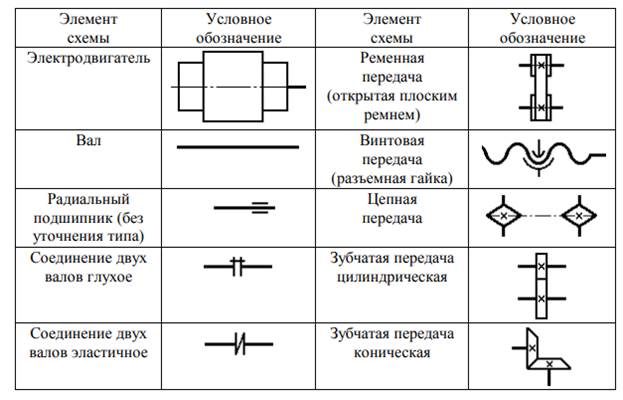
Передача движений от электродвигателя к рабочим органам станка осуществляется при помощи ряда механизмов: зубчатых, ременных, червячных, винтовых, реечных и др. Условное изображение этих механизмов, соединенных в определенной последовательности в кинематические цепи, называется кинематической схемой.Основные условные обозначения для кинематических схем (таблица 1).
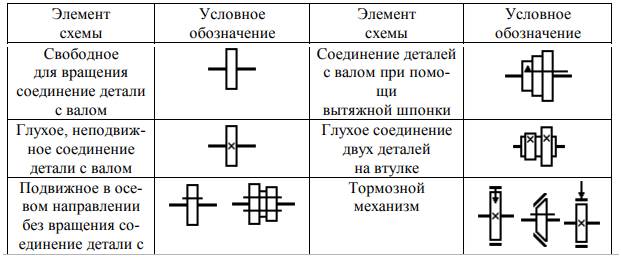
Таблица 1 - Основные условные обозначения для кинематических схем
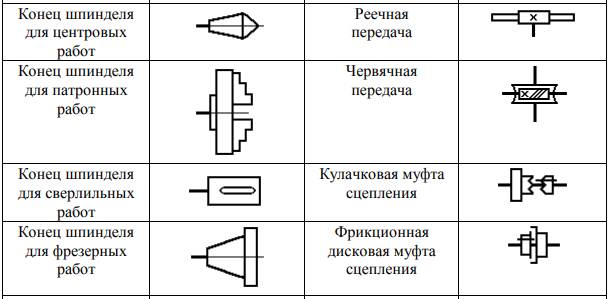
Продолжение табл. 1
Уравнение кинематического баланса
Уравнение, устанавливающее функциональную зависимость между величинами перемещений начального и конечного звеньев кинематической цепи, называется уравнением кинематического баланса.
Начальные звенья кинематической цепи в большинстве случаев имеют вращательное движение, конечные звенья получают как вращательное, так и прямолинейное движение.
Если начальное и конечное звенья оба вращаются, то уравнение кинематического баланса может быть представлено в следующем виде:

где nк – частота вращения конечного звена (шпинделя), об/мин;
nн – частота вращения начального звена (вала электродвигателя), об/мин;
i – передаточное отношение кинематической цепи.

где i1, i2, i3, ..., in – передаточные отношения отдельных кинематических пар цепи.
Задание:
1. Дать определение кинематической схеме и уравнению кинематического баланса.
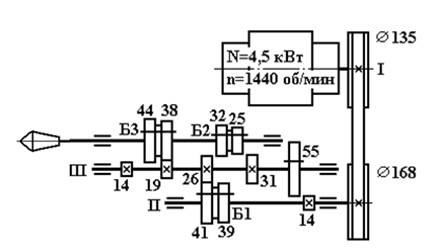
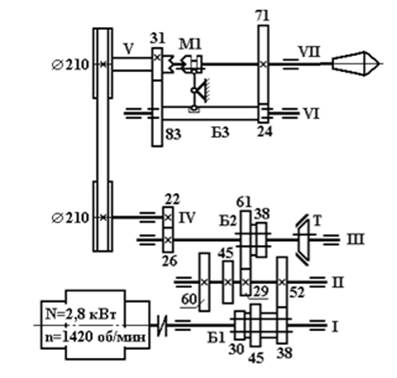
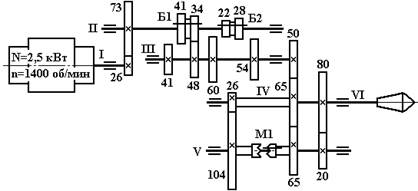
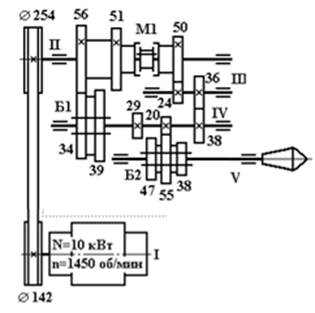
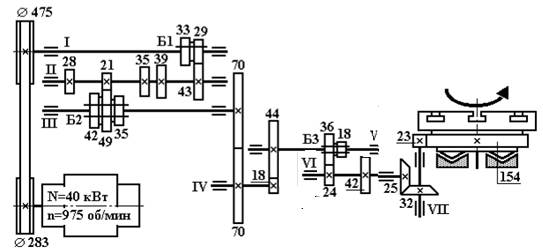
2. Зарисовать кинематическую схему токарного станка, согласно своему варианту на рисунке 1. Отдельно в таблицу вынести условное обозначение каждого элемента схемы и дать ему название используя таблицу 1.
3. Записать чтение кинематической схемы по своему варианту.
Вариант 1
Вариант 2
Вариант 3
Вариант 4
Вариант 5
Рисунок 1 – Исходные данные
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|