- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Изучение законов движения тел в поле
Министерство образования Российской Федерации
Тверской государственный университет
Кафедра общей физики
Лаборатория механики
Лабораторная работа №12
Изучение законов движения тел в поле
силы тяжести на машине Атвуда.
Тверь
Приборы и принадлежности: машина Атвуда, набор грузов и перегрузков.
Введение.
Принцип работы машины Атвуда основан на использовании законов свободного падения тела в воздухе.
Через ролик, монтированный на подшипнике таким образом, чтобы он мог вращаться с возможно малым сопротивлением, проходит нитка с двумя одинаковыми грузами массой М каждый. Следовательно, система находиться в равновесии. (масса М=60+-0.01 гр.)
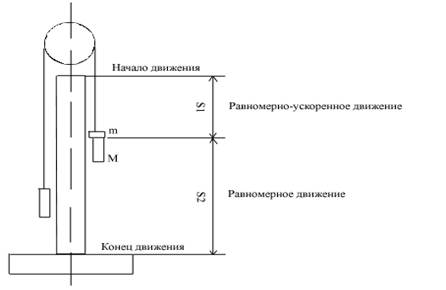
Если на одну сторону блока прибавим небольшой перегрузок массой в м, тогда система - два груза и небольшой перегрузок - получат ускорение пол действием перегрузка, и передвигаясь с ускорением пройдёт путь S1.
На кольце перегрузок будет отцеплен и грузы пройдут, теперь уже равномерным движением путь S2.
Механическая конструкция машины Атвуда.
Общий вид машины Атвуда показан на рис.1. На вертикальной колонне /1/, закреплённой в основании закреплены три кронштейна: неподвижный кронштейн и два подвижных кронштейна - средний /4/ и верхний /5/, а также верхняя втулка /6/.
Основание оснащено регулируемыми ножками, которые позволяют провести выравнивание положения машины.
На верхней втулке, при помощи верхнего диска закреплён узел подшипника ролика, ролик /10/ и электромагнит.
Через ролик проходит нить /12/ с привязанными на её концах грузами /13/ и /14/
Электромагнит, после подведения к нему питающего напряжения, при помощи фрикционной муфты, удерживает систему ролика с грузами в состоянии покоя.
Верхний и средний кронштейны можно перемещать вдоль колонки фиксировать в любом положении, устанавливая таким образом длину пути равномерно-ускоренного и равномерного движения. Для облегчения определения их путей на колонке имеется миллиметровая шкала /15/, все кронштейны имеют указатель положения, а верхний кронштейн дополнительную черту, облегчающую точное согласование нижней грани верхнего, большего груза с определённым началом пути движения.
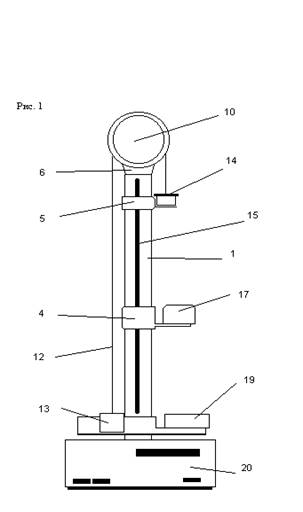 На среднем кронштейне закреплён кронштейн /кольцо/ и фотоэлектрический датчик /17/. Кронштейн /кольцо/ снимает с падающего вниз груза дополнительный перегрузок, а фотоэлектрический датчик в это время образует электрический импульс, сигнализирующий начало равномерного движения грузов. Оптическая ось фотоэлектрического датчика /черта на его корпусе/ находится на уровне указателя положения среднего кронштейна.
На среднем кронштейне закреплён кронштейн /кольцо/ и фотоэлектрический датчик /17/. Кронштейн /кольцо/ снимает с падающего вниз груза дополнительный перегрузок, а фотоэлектрический датчик в это время образует электрический импульс, сигнализирующий начало равномерного движения грузов. Оптическая ось фотоэлектрического датчика /черта на его корпусе/ находится на уровне указателя положения среднего кронштейна.
Нижний кронштейн оснащён двумя кронштейнами с резиновыми амортизаторами, в которые ударяет завершающие своё движение грузы и фотоэлектрическим датчиком /19/ с оптической осью на уровне указателя кронштейна, после пересечения которой нижней гранью падающего груза, образуется электрический сигнал, сигнализирующий прохождение грузами определённого пути.
На основании прибора, прикреплённый к нему жестко, находиться миллисекундомер /20/.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|