- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение высшего образования
Государственный Морской Технический Университет
Кафедра корабельных автоматизированных комплексов и
информационно-управляющих систем
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
по курсовому проекту по дисциплине
«Информационно-управляющие системы корабельных комплексов вооружения»
Исследование алгоритма расчёта координат местонахождения судна по пеленгам на два стационарных маяка с известными координатами. Построение зависимости точностей определения координат судна от значения пеленга на первый маяк
Санкт-Петербург
2019
Содержание
1 Задание………………………………………………………………………..………………...3
2 Описание задачи..……………………………………………………………………………...4
3 Блок-схема программы………………………………………………………………………...6
4 Анализ результатов моделирования………………………………………………………….9
5 Выводы………………………………………………………………………………………..11
Приложения…………………………………………………………………………………….12
П1. Текст программы…………………………………………………………………………..12
1 Задание
Требуется исследовать алгоритм расчета координат местонахождения судна по пеленгам на два стационарных маяка с известными координатами. Построить зависимости точностей определения координат судна от значения курсового угла на первый маяк.
Выполнить задачу можно проделав несколько операций:
1) Описать задачу математически.
2) Построить блок–схему по математическому описанию.
3) Составить код программы и провести моделирование.
4) Построить графики зависимостей по результатам моделирования.
2 Описание задачи
Исходная схема изображена на рисунке №1.
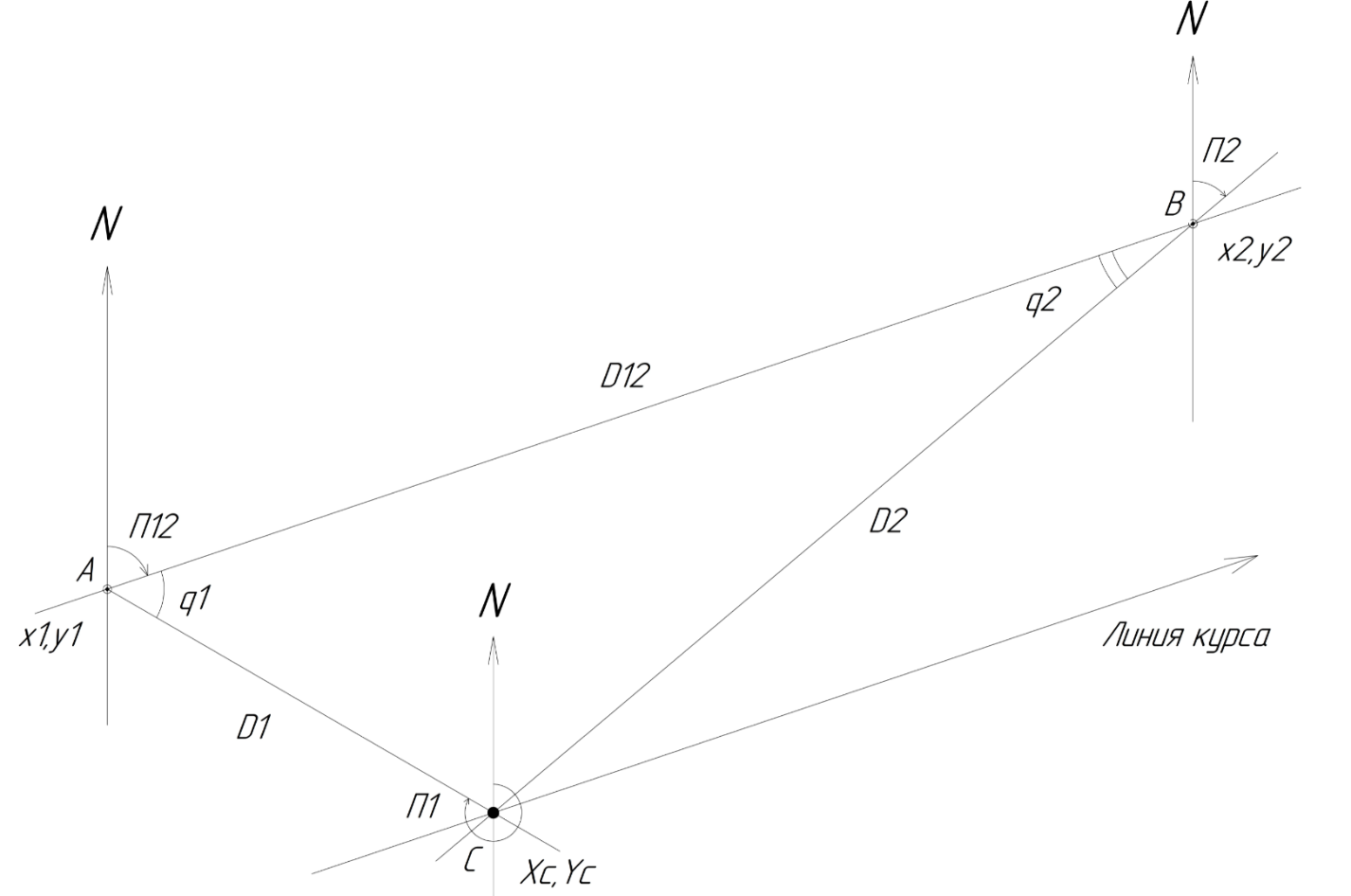
Рис.№1.
x1, y1 – координата маяка А (первый маяк).
х2, у2 – координата маяка В (второй маяк).
П1, П2 – первый и второй пеленги на маяк А и В, измеряемые с наблюдателя С.
q1, q2 – первый и второй курсовые углы.
σП – среднеквадратичное отклонение измеряемого пеленга.
D1 – дистанция от наблюдателя до маяка А.
D2 – дистанция от наблюдателя до маяка В.
D12 – дистанция между маяками.
Xc – координаты судна по оси абсцисс.
Yc – координата судна по оси ординат.
Входные величины: x1, x2, y1, y2, П1, П2, σП.
Математическое описание задачи:
1) Расчет кругового арктангенса угла, под которым наклонена прямая линия, проходящая через два маяка:
П12 = 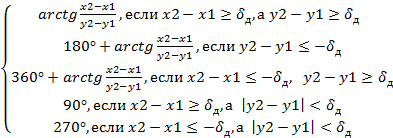
2) Зная первый пеленг и круговой арктангенс, можно рассчитать первый курсовой угол:
q1 = П1 – 180° − П12.
3) После расчета первого курсового угла, «прогоняем» величину угла через функцию Прив180°(х) приведения угла х к заданному диапазону углов [-180°;180°]:
х = x − 360°, если x > 180°.
х = x + 360°, если x £ −180°.
4) Зная второй пеленг, можно рассчитать второй курсовой угол:
q2 = П12 – П2.
5) После расчета второго курсового угла, «прогоняем» величину угла через функцию Прив180°(х) приведения угла х к заданному диапазону углов [-180°;180°]:
х = x − 360°, если x > 180°.
х = x + 360°, если x £ −180°.
6) Расчет дистанции между маяками:
D12 =  .
.
7) Расчет дистанции от наблюдателя С до маяков А и В, соответственно:
D1 =  ;
;
D2 =  .
.
8) Расчет координат судна:
Хс = х1 + D1·cos(q1)
Yc = y1 – D1·cos(P1 – P12 – q1).
3 Блок-схема программы
Блок схема имеет сложный вид, ветвления и подпрограммы: program №1 и блок Gauss.
Общий вид блок-схемы показан на рисунке №2.
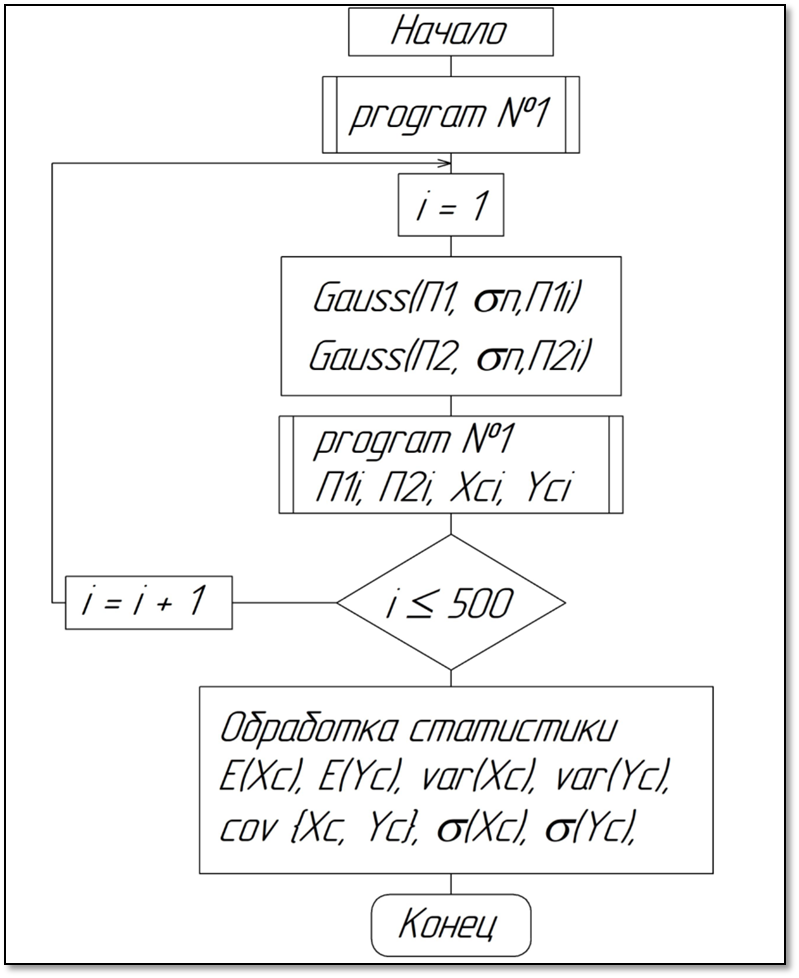
Рис.№2.
Блок-схема подпрограммы program №1 изображена на рисунке №3:

Рис.№3.
Блок-схема подпрограммы Gauss изображена на рисунке №4.
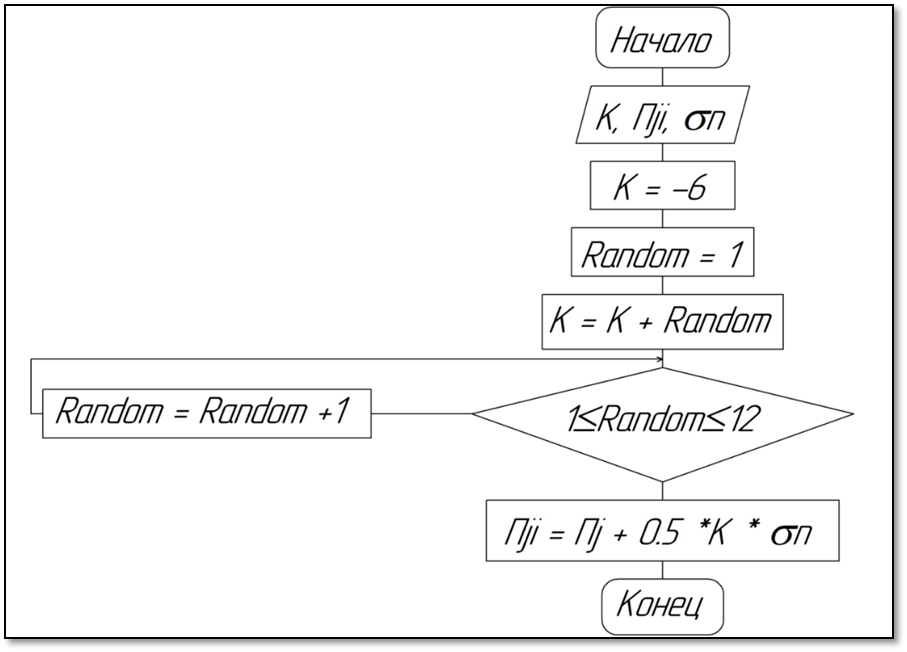
Рис.№4.
4 Анализ моделирования
Результатами моделирования стали накопленные статические данные величин Xci и Yci.
Требуется рассчитать величины: EXc, EYc, var{Xc}, var{Yc}, cov{Xc,Yc}, σXc, σYc.
Расчетные формулы:
1) EXc =  ; EYc =
; EYc =  .
.
2) var{Xc} =  ; var{Yc} =
; var{Yc} =  .
.
3) cov {Xc,Yc} = 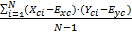 . 4) σXc =
. 4) σXc =  , σYc =
, σYc =  .
.
Результаты обработки накопленных статистических данных приведены в таблице №1.
| EXc, м | EYc, м | var{Xc}, м2 | var{Yc}, м2 | cov{Xc,Yc}, м2 | σXc, м | σYc, м | |
| П1 = 330° П2 = 40° q1 = 84.775° q2 = 25.225° Хс = 5476.3 Yc = 5470.5 | 10896.75 | 10509.99 | 19204408.1 | 19338391.5 | -7266707 | 4382.3 | 4.397.5 |
| П1 = 320° П2 = 39° q1 = 74.775° q2 = 26.22° Хс = 6363.4 Yc = 6023 | 10581.05 | 11289.19 | 17368101.3 | 17096565.3 | 4598998.98 | 4167.5 | 4134.8 |
| П1 = 310° П2 = 36° q1 = 64.775° q2 = 29.2° Хс = 7405.6 Yc = 6371.9 | 10735.98 | 12252.7 | 17188306.7 | 16886342.3 | 6397930.5 | 4145.9 | 4109.3 |
| П1 = 300° П2 = 32° q1 = 54.775° q2 = 33,2° Хс = 8646.8 Yc = 6838.6 | 10942.7 | 12433.3 | 16887282.1 | -9860353.06 | 4109.4 | 4157.7 | |
| П1 = 290° П2= 25° q1 = 44,775° q2 = 40,2° Хс = 10307 Yc = 7443 | 10681.99 | 12913.03 | 16637709.8 | 16989828.9 | 15190779.7 | 4078.9 | 4121.9 |
| П1 = 280° П2 = 11° q1 = 34,775° q2 = 54,2° Хс = 12686 Yc = 8375 | 10656.09 | 12589.11 | 16280019.1 | 17006436.5 | -1540516.5 | 4034.85 | 4123.88 |
После обработки статистических данных, можно построить графики зависимостей курсового угла на маяк А от средних квадратичных отклонений по оси абсцисс и ординат.
Зависимость курсового угла на маяк А от СКВО по оси абсцисс на рисунке №5.
Зависимость курсового угла на маяк А от СКВО по оси ординат на рисунке №6.

|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|